
Fターム[3D041AF00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637)
Fターム[3D041AF00]の下位に属するFターム
Fターム[3D041AF00]に分類される特許
1 - 19 / 19
状況適合型運転支援装置
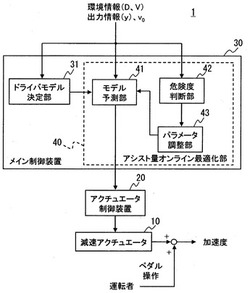
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
車両の制御装置

【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
車両制御装置
【課題】自車両の不必要な燃料消費を防止し、燃費を向上させる。
【解決手段】車両制御装置10は、自車両の速度を検出す車両状態センサ13と、自車両の位置を検出する現在位置検出部21と、自車両の進行方向前方に存在する車両停止位置を検出する停止位置検出部25と、自車両が慣性走行をおこなう状態での速度変化を予測する速度変化予測部23と、現在位置から自車両が慣性走行をおこなった場合に車両停止位置に到達する時点での速度を第1速度として算出する第1速度算出部26と、現在位置から自車両が慣性走行をおこなった場合に車両停止位置から所定距離手前の手前位置に到達する時点での速度を第2速度として算出する第2速度算出部27と、第1速度が第1所定値(例えば、ゼロ)以上である場合または第2速度が第2所定値以上である場合に加速制御の実行を禁止する車速制御部28とを備える。
(もっと読む)
車両の動力システムの制御方法
【課題】安価な構成で、車両の走行環境や運転状態を判断して車両の動力システムを制御する方法を提供する。
【解決手段】車両の動力システムの制御方法として、車両のドライバーの運転スタイルを表す車両のアクセルペダルやブレーキペダルの踏み込み回数を判定する工程と、アクセルペダルやブレーキペダルの踏み込み回数履歴(加速、減速履歴)を判定する工程と、加速、減速履歴に基づいて、動力システムを制御する工程を有する。また、加速、減速履歴を判定する工程はドライバーの動力要求を判定する工程を含む。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
車両用加速度制御装置
【課題】オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高める。
【解決手段】目標加速度の微分値の微分値であるDDTGに基づいてPID制御の比例ゲイン、積分ゲインおよび微分ゲインを設定することで、目標加速度に対する実加速度の追従性をより高めた制御を行うことが可能となる。このように、真に追従性を高めたい場合にのみゲインを大きくすることで、オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高めることが可能となる。
(もっと読む)
車両の運転制御装置および運転制御方法
【課題】車両走行に影響する運転環境の変動に対しドライバの運転操作が急変しても即座に応答し得るような車両の運転制御装置および方法を提供する。
【解決手段】自車両の走行に影響を与える運転環境の状態を検出する環境状態検出部32と、環境状態検出部32の検出情報に基づいて、運転環境の変動に対するドライバの運転操作の変化を予測運転パターンとして予測するパターン選択部33と、予測された予測運転パターンに基づき、自車両の運転状態をドライバの運転操作の変化に先立ってその変化に適した運転状態に制御する制御部34とを備える。
(もっと読む)
加速度評価装置
【課題】自動車の燃料消費量を抑制することを支援し、燃料消費に伴う有害物質の削減に資する。
【解決手段】本発明は、自動車の走行中において、急加速または急減速されたとき、急加速または急減速された時点の乗員、積載貨物、積載燃料の重量を含めた車両総重量を推定する。そして、推定された車両総重量に基づいて加速度閾値または減速度閾値を算出し、加速度または減速度(絶対値)がこれらの閾値以上となった場合に、これを運転者に対して報知する。この報知の際に、表示装置に、“加速(減速)限度を超えたこと”を表示する。
(もっと読む)
車両の駆動力制御装置
【課題】アクセル操作に伴う目標加速度をエンジン出力制御と変速制御とで達成するに当たり、複数の変速が行われる違和感を回避する。
【解決手段】演算部41で車両の目標加速度tACCを求め、演算部42でtACCを達成する目標駆動力tFを求め、このtFを、制御対象モデルGe(s)の逆系{1/ Ge(s)}と、規範応答モデルGre(s)との組み合わせになる伝達関数Ga(s)={Gre(s)/ Ge(s)}を持った位相補償器431に通してエンジントルク指令値演算用要求駆動力demFENGを求める。演算部52では力tFおよび実車速aVSPから目標変速段を求める。tFに対し位相補償を施して要求駆動力demFENGとなし、エンジントルク指令値cTEは位相補償後の要求駆動力demFENGに基づき決定するが、目標変速段tSHIFTは位相補償前の目標駆動力tFに基づき決定する。
(もっと読む)
車両運動制御装置及び制御方法
【課題】左右同舵角の操舵のみ行える操舵機構を有する車両にも操舵−制駆動統合制御が適用できるようにする。
【解決手段】目標車体フォース及びモーメントを達成するための各輪発生力を演算し、各輪タイヤの最大発生力を表す各輪摩擦円の大きさと各輪の前後力とから前後力を摩擦円の大きさで規格化した前後μ利用率を演算し、各輪の前後μ利用率、各輪横力、及び各輪接地荷重に基づいて、左右同一の操舵角を演算し、演算された操舵角に基づいて、車両運動を制御する。
(もっと読む)
走行制御装置
【課題】 踏み間違い判断の精度を向上でき、かつ、踏み間違いが生じたときに、運転者に応じたより適切な対応をとることが可能な走行制御装置を提供する。
【解決手段】 走行制御装置1は、アクセルペダルのストロークを検出するアクセルストロークセンサ11と、アクセルストロークが全開位置WOTよりも大きい領域では、アクセルストロークの増大に伴ってスロットル開度を減少する踏み間違い判定ECU10および走行支援ECU30とを備える。踏み間違い判定ECU10および走行支援ECU30は、アクセルペダルが第1領域で戻された場合には、アクセルストロークの減少に伴ってスロットルバルブ35を開弁側に駆動し、アクセルペダルが第2領域で戻された場合には、アクセルストロークの減少に伴ってスロットル開度を保持する。また、アクセルペダルが第2領域で戻されること無く、ストッパ位置Fまで達したときには、スロットルバルブ35を全閉する。
(もっと読む)
加速感評価装置及び車両制御装置
【課題】ドライバの加速度期待値を表す物理量を演算することにより、ドライバの加速度期待値に対する体感加速度の評価を行う。
【解決手段】車両を加速させる際のドライバの車両に対する操作量を検出し、車両挙動量を検出し、操作量の検出値及び車両挙動量の検出値に基づいて、ドライバが期待する加速性能の期待値を表す期待値の物理量を演算し、ドライバが感じている加速度の体感を表す体感物理量を演算し、期待値の物理量と体感物理量との偏差または比に基づいて、加速感の評価値を演算する。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサの出力を制御量として入力してアクチュエータの操作量を決定し、決定した操作量に基づいてアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、複数個のセンサの出力を変数として入力し、制御システムのアクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
運転操作補助システムを継続して使用するときでも確実に情報の伝達を行える車両用運転操作補助装置を提供する。
【解決手段】
自車両と先行車との接触の可能性が高い場合は、接触可能性を低下するように制駆動力制御とアクセルペダル反力制御を行う。システムによる制駆動力制御が継続的に行われている場合、運転者は継続的に減速感を感じるので、接触可能性の報知としての減速度の変化を感知できなくなってしまう。制動制御を開始する前には、ブレーキアクチュエータをスタンバイ状態にしてブレーキの応答性を高めているが、制駆動力制御が継続的に行われている場合はスタンバイ状態を解除する。これにより、実際に制動力が発生するタイミングを遅くして運転者に刺激を与える。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
1 - 19 / 19
[ Back to top ]