
Fターム[3D041AF01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | フィードバック制御 (916)
Fターム[3D041AF01]に分類される特許
1 - 20 / 916
クリープ車速制御装置
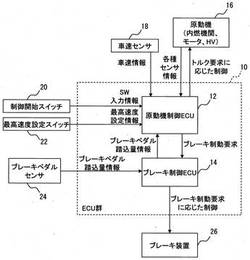
【課題】運転者による運転操作を複雑化することなく、クリープ速度を所望の速度に容易に調整することが可能なクリープ車速制御装置を提供すること。
【解決手段】ブレーキペダルの踏込量に応じてクリープ車速の目標車速を定める。そして、車両のクリープ車速が目標車速となるように、原動機16によって発生される駆動トルク及びブレーキ装置26によって発生される制動トルクを制御する。このため、車両の運転者は、ブレーキペダルの踏込操作により、車両のクリープ車速を、容易に所望の速度に調整することができ、さらに、その増減の調整も容易となる。
(もっと読む)
自動車

【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
運転支援装置
【課題】LKA制御が中止したことをドライバーに警告音や表示により知らせていた従来の方法と比較し、LKA制御が中止したことをドライバーにより気付きやすい方法で報知することのできる運転支援装置を提供する。
【解決手段】車両の走行状況を検出する走行状況検出手段と、車両のドライバーの運転を支援するために複数の制御を行う制御手段と、予め定められた時間、車両のドライバーが当該車両のハンドルから手を離したか否かを判断する判断手段と、判断手段が車両のドライバーは予め定められた時間ハンドルから手を離したと判断した場合、複数の制御のうち少なくとも2つ以上の制御を中止する中止手段とを備える。中止手段は、判断手段が車両のドライバーは予め定められた時間ハンドルから手を離したと判断した場合に車線維持制御および当該車線維持制御と異なる制御を中止することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
オートクルーズ制御装置
【課題】高い加速性能を必要としない状況では極力低いエンジン回転数での走行を行うことで、低燃費で経済的な巡航走行を行うことのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ走行中の車間距離制御実行時(S1)には、車両負荷度、エンジン出力、シフトアップ後のエンジン回転数の判定を行い(S2、S4、S5)、高い加速度を必要としない前走車追従時にはシフトアップを実施する(S6)。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】バッテリの内部抵抗が高くても過電圧を抑制し、バッテリを保護する。
【解決手段】内燃機関10と、電動発電機20と、前記内燃機関の出力軸及び前記電動発電機の出力軸に直接的又は間接的に接続された駆動車輪54と、前記電動発電機と前記駆動車輪との間の駆動力を断接するクラッチ25と、前記電動発電機に電力を供給するとともに前記電動発電機からの電力を充電するバッテリ30とを備えたハイブリッド車両に対し、制御信号を出力する制御装置であって、前記内燃機関を少なくともアイドル回転数で駆動する要求と、前記電動発電機を回生駆動する要求と、前記バッテリの内部抵抗値が所定値以上であることを検出した場合に、前記内燃機関の回転数制御を実行する制御手段60を備える。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
作業車両
【課題】重負荷時には、エンジン回転数を低下させ、車速を低下させることにより、エンストを防止することができ、軽負荷時には、エンジン回転数の上昇を抑制して低燃費で走行することができる作業車両を提供する。
【解決手段】エンジン負荷率Lが、設定した重負荷値L1よりも大きくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを増加させ、エンジン回転数Nrがエンジン回転数上限値Nmaxまで増加した後、エンジン負荷率Lが、設定した重負荷値L2よりも大きくなった場合、車速Vを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する重負荷モードと、エンジン負荷率Lが設定した軽負荷値L4よりも小さくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する軽負荷モードと、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
車両の駆動力制御装置
【課題】 駆動車輪のスリップに伴う車体振動を抑制できる車両の駆動力制御装置を提供する。
【解決手段】 駆動車輪である左右後輪2c,2dがスリップしたとき、車両の目標駆動力tFo0に応じた動力源(エンジン1、モータ/ジェネレータ5)の目標値(目標エンジントルクtTe、目標モータ/ジェネレータトルクtTm)から当該スリップに起因する車体振動の要因となる成分を除去または低減するフィルタ処理を実施する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時、トルク変動がそのまま車輪に伝わることを防止しながら、発進クラッチの固着判定時間の短縮化を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第2クラッチ5(CL2)と、固着判定手段(図9)と、を備える。モータジェネレータ2は、エンジン1に連結される。第2クラッチ5(CL2)は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。固着判定手段(図9)は、モータジェネレータ2をスタータモータとするエンジン始動制御が開始されると、モータジェネレータ2に対する許容入力トルク指令とエンジン1に対する燃料噴射停止指令を出力し続け、第2クラッチ5(CL2)のスリップ量Sが固着判定閾値S1を超えないままで第2ターマー値TIM2以上経過すると、第2クラッチ5(CL2)が固着であると判定する。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
惰行制御装置
【課題】乗り心地を向上させ、ドライバーの不快感を低減することが可能な惰行制御装置を提供する。
【解決手段】惰行制御中は惰行許可フラグをオフにし、惰行制御中でなく、かつ惰行制御終了条件が成立したときに惰行許可フラグをオンにする惰行許可フラグ制御部6を備え、惰行制御実行判定部5は、惰行許可フラグがオンであるときのみ惰行制御を開始するようにされる。
(もっと読む)
惰行制御装置
【課題】車両振動の影響による惰行制御の終了を防止できる惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのクラッチ回転数とアクセル開度のプロット点が惰行制御可能領域内にあって、アクセルペダル操作速度が所定範囲内にて、かつクラッチ回転数とアクセル開度のプロット点が惰行制御しきい線をアクセル開度減少方向に通過したとき、クラッチを断すると共にエンジン回転数を低下させて惰行制御を開始し、アクセルペダル操作速度が所定範囲外となったか又はプロット点が惰行制御可能領域外に出たとき惰行制御を終了する惰行制御実行部3と、アクセルペダル操作加速度が車両振動判定値範囲外のときには、惰行制御実行部3による惰行制御開始・終了の判定を無効とし、アクセルペダル操作加速度が車両振動判定値範囲内のときは、惰行制御実行部3による惰行制御開始・終了の判定を有効とする振動影響除去部4とを備える。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
1 - 20 / 916
[ Back to top ]