
Fターム[3D043EF17]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける制御、制御対象 (1,466) | 前後車輪への動力分配装置の制御 (368)
Fターム[3D043EF17]の下位に属するFターム
センタデフの差動制御 (65)
クラッチ制御 (253)
Fターム[3D043EF17]に分類される特許
1 - 20 / 50
路面摩擦係数推定装置、駆動力配分制御装置、及び四輪駆動車
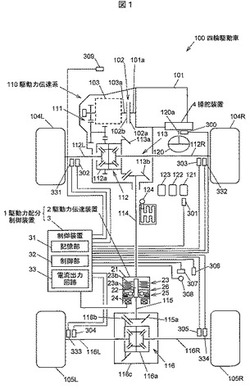
【課題】操舵角の中立位置が確定していなくても、路面摩擦係数を推定することが可能な路面摩擦係数推定装置、駆動力配分制御装置、及び四輪駆動車を提供する。
【解決手段】駆動力配分制御装置1は、左右後輪105L,105Rの回転速度差に基づいて直進走行中であるか否かを判定する第1の直進判定手段321と、操舵角に基づいて直進走行中であるか否かを判定する第2の直進判定手段322と、第1及び第2の直進判定手段321,322のうち、何れの判定結果を採用するかを選択する選択手段323と、選択手段323により選択された第1又は第2の直進判定手段321,322が直進走行中であると判定したとき、路面の摩擦係数μを推定する摩擦係数推定手段324と、摩擦係数推定手段324によって推定された摩擦係数μに基づいて後輪105に伝達すべき駆動力を演算により求める駆動力演算手段325とを備える。
(もっと読む)
摩擦伝動装置

【課題】複数のローラを相互に径方向に押圧接触させて伝動するトラクション伝動装置において、伝動容量制御時の消費エネルギーを小さくし、モータの小型化を図る。
【解決手段】被動ローラと駆動ローラのうち少なくとも1個のローラを該ローラの回転軸線から偏心した軸線の周りに旋回させる旋回ローラとすることによりローラ間径方向接触圧力を加減する。ローラ間径方向押圧接触力を発生し始めてローラ間径方向押圧接触力を最大にする旋回中、該旋回ローラの旋回を助成するローラ旋回アシスト手段を設ける。
(もっと読む)
車両の制御装置
【課題】アクセルオフ時の旋回初期の車両安定性を確保する。
【解決手段】アクセルオフによるエンジンブレーキ作動状態で、前輪が路面から受けるトルク(反力トルク)が、後輪が路面から受けるトルクよりも大きい場合(前輪回転数<後輪回転数の場合)には四輪駆動状態にする。このような制御によりエンジンブレーキ作動時(減速時)に四輪駆動状態にすることによって、前輪が路面から受けるトルクの一部が後輪に伝達される。これにより前輪の縦方向(車両が進む方向)の路面摩擦力が小さくなって、前輪の横力が大きくなるので、アクセルオフでの旋回初期の回頭性が向上する。その結果として、アクセルオフでの旋回初期における車両安定性を確保することができる。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記車両の走行状態が不安定である場合、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記車両の不安定パラメータに基づき前記副駆動輪制限駆動力を算出する算出部を有する。前記第1の制御手段は、前記副駆動輪駆動力を前記副駆動輪制限駆動力に一致させることにより、前記主駆動輪駆動力を増加させる。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】不必要な算出を抑制可能な制御装置を提供すること。
【解決手段】車両に働く駆動力を制御する制御装置は、前記駆動力を制御する第1の制御手段と、前記駆動力の制限を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記第1の制御手段から出力される前記駆動力を入力する入力部と、前記駆動力を制限する制限駆動力を算出する算出部と、を有する。前記制限駆動力から前記駆動力を減算した第1の値が閾値以上である場合、前記算出部は、前記制限駆動力よりも大きい第2の値を出力する。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記車両の走行状態が不安定である場合、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記車両の横加速度に基づき第1の制限駆動力を算出する第1の算出部と、前記車両の前後加速度に基づき第2の制限駆動力を算出する第2の算出部と、を有する。前記第2の制御手段は、前記第1の制限駆動力及び前記第2の制限駆動力のうちの最大の制限駆動力を前記副駆動輪制限駆動力として前記第1の制御手段に要求する。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記車両の走行状態が不安定である場合、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に要求する第2の制御手段と、前記主駆動輪駆動力及び前記副駆動輪駆動力の元である原動機駆動力を制御する第3の制御手段と、を備える。前記第3の制御手段は、前記副駆動輪制限駆動力に基づき前記原動機駆動力を減少させる。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】過小な制限駆動力の算出を抑制可能な制御装置を提供すること。
【解決手段】車両に働く駆動力を制御する制御装置は、前記駆動力を制御する第1の制御手段と、前記駆動力の制限を前記第1の制御手段に要求する第2の制御手段と、を備える。前記第2の制御手段は、前記第1の制御手段から出力される前記駆動力を入力する入力部と、前記駆動力を制限する制限駆動力を第1のモードで算出する算出部と、を有する。前記駆動力と前記制限駆動力との第1の差が閾値以上である場合、前記算出部は、前記第1の差が大きくなることを制限するように、前記制限駆動力を前記第1のモードに代わりに第2のモードで算出する。
(もっと読む)
少なくとも選択的に4輪駆動される自動車用の全輪クラッチのトルク分配を制御するための方法および装置
【課題】少なくとも選択的に4輪駆動される自動車用の全輪クラッチのトルク分配を制御するための方法および装置を提供する。
【解決手段】この自動車は第1車軸と第2車軸を有するクラッチ制御式全輪駆動装置を備え、全輪クラッチ2の変更可能な調節は第1車軸12と第2車軸22への所望なトルク分配を設定し、この場合、自動車1の第1車軸12と第2車軸22の各車輪のタイヤスリップの一連の測定データに基づいておよび車輪のタイヤスリップの少なくとも1つの特性マップに基づいて、それぞれの車輪に作用する縦方向力に依存して、第1と第2車軸への全輪クラッチ2の実際のトルク分配が、車輪の縦方向力を介して求められ、この場合、全輪クラッチ2の求められた実際のトルク分配を、全輪クラッチ2の所望なトルク分配と比較することによって、制御偏差が求められ、この制御偏差が全輪クラッチ2のトルク分配を制御するための制御回路に供給される。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
車両の駆動力配分制御装置
【課題】本発明は、駆動力配分の精度を高める上で重要な回転速度差の値の精度を、エンジン始動後、運転者が車両を発進させるタイミングまでに高めることを目的としている。
【解決手段】このため、エンジンからの駆動力を主駆動輪及び副駆動輪へと配分する駆動力配分装置を備えた車両の駆動力配分制御装置において、主駆動輪と副駆動輪との回転速度差を検出する回転速度差検出手段を備え、各駆動輪の空気圧を検出する空気圧検出手段を備え、各駆動輪の空気圧と規定値との差を判定し、差が設定値以下の場合に、各駆動輪の空気圧と規定値との差に応じて、補正量を算出する補正量算出手段を備え、回転速度差検出手段により検出された回転速度差の値と、補正量算出手段により算出された補正量とから回転速度差補正量を算出し、回転速度差補正量に応じて、駆動力配分制御を行う制御手段を備えている。
(もっと読む)
電動車両の差動制限制御装置
【課題】前後軸間、左右輪間の差動制限を行う際、車両振動や駆動力変化を抑制する電動車両の差動制限制御装置を提供する。
【解決手段】車輪間の実回転数差及び目標回転数差を演算し、実回転数差を目標回転数差に追従させる補正トルクを演算し、補正トルクの最大値を制限する最大差動制限トルクを演算し、補正トルクの絶対値の上限値を最大差動制限トルクで制限したリミット出力を演算し、総駆動トルクから配分された目標駆動トルクの一方にリミッタ出力を加算すると共に、他方からリミッタ出力を減算し、当該トルクとなるように、電動モータを制御して、差動制限を行う。
(もっと読む)
ハイブリッド自動車の差動制限制御装置
【課題】前後軸間の差動制限を行う際、車両振動や駆動力変化を抑制するハイブリッド自動車の差動制限制御装置を提供する。
【解決手段】前後軸間の実回転数差及び目標回転数差を演算し、実回転数差を目標回転数差に追従させる副駆動軸補正トルクを演算し、副駆動軸補正トルクの最大値を制限する最大差動制限トルクを演算し、副駆動軸補正トルクの絶対値の上限値を最大差動制限トルクで制限したリミット出力を演算し、総駆動トルクから配分された副駆動軸駆動トルクをリミッタ出力で補正し、補正した副駆動軸駆動トルクとなるように、電動モータを制御して、差動制限を行う。
(もっと読む)
4個の駆動車輪を有する自動車両の前端部と後端部との間のエンジントルクの分配方法および装置
本発明は、少なくとも4個の駆動輪(3、4、6、7)を有する自動車両の前端部(2)と後端部(3)との間のエンジントルクを分配するための装置(1)に関する。本装置は、エンジントルクを分配するように構成される制御アクチュエータ(13)と、前端部(2)と後端部(5)との間の車両の速度および速度損失を計算するための計算手段(30)と、アクチュエータ(13)のためのトルク分配設定値を発生させるための発生手段(31)とを含み、前記発生手段(31)は、トルク分配設定値の第1の値を決定する初期決定手段(40)を備えており、前記第1の値は、車両の速度が低い方の閾値よりも低い場合には最大定数に等しく、車両の速度が低い方の閾値と高い方の閾値との間にある場合には速度損失の関数に等しく、または車両の速度が高い方の閾値よりも高い場合にはゼロに等し。 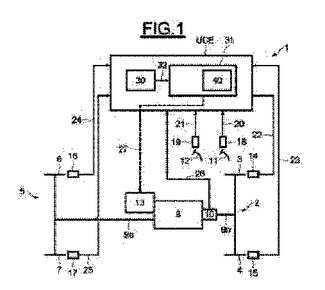 (もっと読む)
(もっと読む)
車両用制御装置および車両用制御方法
【課題】アクセルペダルの踏み込み量の増加に対して応答性よく車両に発生する駆動力を増加させる。
【解決手段】ECUは、2WDモードでないと(S100にてNO)、4WDモードに対応する出力特性を選択するステップ(S104)と、走行状態を判定するステップ(S106)と、4WDモード選択時に車両に要求されるトルクを算出するステップ(S108)と、リアモータに要求されるトルクを算出するステップ(S110)と、第2のオルタネータに要求される発電電力を算出するステップ(S112)と、第2のオルタネータに対する制御出力を算出するステップ(S114)と、リアモータの出力トルクを推定するステップ(S116)と、第2のオルタネータの負荷を算出するステップ(S118)と、変速比の目標値を算出するステップ(S120)と、エンジンに対して要求される出力を算出するステップ(S122)と、エンジン対して要求される駆動力を修正するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をする場合に正確なヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車両が低車速かつ操舵角が所定値以上の大舵角旋回をおこなう場合に、その旋回をおこなうために車両に要求されるヨーモーメントMを操舵される駆動輪が発生するように、操舵角を考慮して前記駆動輪の駆動トルクが制御されるように構成されている。操舵される駆動輪の操舵角を考慮に入れて駆動輪が出力する駆動トルクが制御されるので、車両の旋回に要求されるヨーモーメントMを、操舵される駆動輪の駆動トルクを制御することによって正確に発生させることができる。
(もっと読む)
駆動状況に基づく一組の車両部材の駆動方法およびそれに関連する装置
本発明は、自動車の一部材または一組の部材の少なくとも一つの有効制御信号(Signal_effect)を使用する駆動状況に基づく駆動方法に関し、前記方法は、各駆動状況に相当する種々の制御戦略間を調停することを含み、各制御戦略は識別子(id1、id2、id3)で標識されている。この方法は、さらに、各戦略に相当する最適制御信号を連続的に計算すること、選択された戦略の識別子を表す値(Ident(t))を連続的に送信すること、戦略識別子の変更が生じたことを検出すること、変更を検出すると、前記戦略の変更の検出から有限な時間間隔に亘って0から1に増加する時間関数x(t)を発生させること、前記戦略識別子の変更を検出すると、識別子の変更後少なくとも一の時間間隔に亘って、最後の識別子変更の後でx(t)によって重み付けされた制御戦略の最適信号(Signal(Ident(t)))と、最後の識別子変更前に(1-x(t))によって重み付けされた制御戦略の最適信号(Signal(Ident_avt_chg)の和(Signal_mix)である有効制御信号(Signal_effect)を発信することを含む。 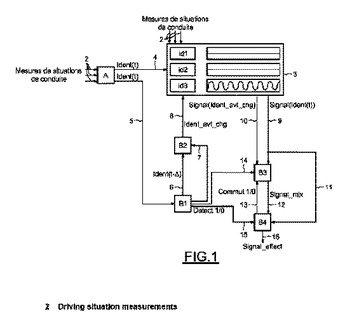 (もっと読む)
(もっと読む)
駆動力配分制御装置
【課題】障害物回避支援装置を備えた車両において回避性能を向上させることができる駆動力配分制御装置を提供する。
【解決手段】車両は、駆動力配分制御装置1と電動パワーステアリング装置2を備える。駆動力配分制御装置1は、前後輪の駆動力配分を行う前後輪駆動力配分制御部21と、後輪の左右輪の駆動力配分を異ならせることによりヨーモーメントを制御する後輪左右駆動力配分制御部22と、アクチュエータ制御部23と、制御ゲイン算出部24とを備える。電動パワーステアリング装置2は、車両前方の障害物を検知し該障害物との接触を回避する操作を支援する回避操作支援制御部42を備える。電動パワーステアリング装置2の回避操作支援制御部42が、障害物との接触を回避する操舵操作を支援する制御を行っているときには、後輪左右駆動力配分制御部22におけるヨーモーメント制御量のゲインを通常時よりも高める。
(もっと読む)
四輪駆動車のトルク配分制御装置
【課題】エンジントルクを前輪と後輪とにトルク配分する制御精度をより向上させることを可能とする。
【解決手段】路面と自車の各車輪との間で走行方向の前後、左右、上下に発生する各3方向の輪荷重を検出する輪荷重検出部79としての3方向荷重センサと、自車の走行状態を各3方向の輪荷重を含めた出力値に基づいて検出する走行状態検出部83と、走行状態に応じてトルク伝達カップリングを制御するカップリング制御部73と、検出された上下輪荷重により自車の姿勢を判断する車両姿勢判断部77と、判断された自車の姿勢に応じてトルク伝達カップリングのカップリング・トルクを補正する補正部81とを備えたことを特徴とする。
(もっと読む)
四輪駆動車の駆動力配分制御装置
【課題】副駆動輪側の駆動系の耐力を小さく設定できる四輪駆動車の駆動力配分制御装置。
【解決手段】エンジン1の出力トルクを、主駆動輪5,6に伝達するとともに、トルク配分アクチュエータ9を介して副駆動輪7,8に伝達する四輪駆動車の、トルク配分を車両状態に応じたものとする駆動力配分制御装置において、推定主駆動輪許容トルク算出手段10が、主駆動輪の推定荷重に基づき推定主駆動輪許容駆動トルクを算出し、目標伝達トルク設定手段10が、エンジンの出力トルクに基づく総駆動トルクから推定主駆動輪許容駆動トルクを減算した値を副駆動輪への目標伝達トルクとして記憶し、次回の処理でより高い駆動トルク要求の場合に、主駆動輪と副駆動輪との回転差が所定以上の発生なければ前回記憶した目標伝達トルクの値を副駆動輪への目標伝達トルクとして設定し、アクチュエータ制御手段10が、目標伝達トルクを副駆動輪に伝達するよう制御する。
(もっと読む)
1 - 20 / 50
[ Back to top ]