
Fターム[3D044AA24]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・目的 (680) | 危険回避、安全性向上 (259)
Fターム[3D044AA24]の下位に属するFターム
追突防止、車間距離保持 (143)
急加減速、暴走防止 (10)
システムのフェイルセーフ (4)
検出部の信頼性向上 (7)
故障診断 (3)
警報 (49)
誤操作対策 (11)
Fターム[3D044AA24]に分類される特許
1 - 20 / 32
画像処理装置及びその方法
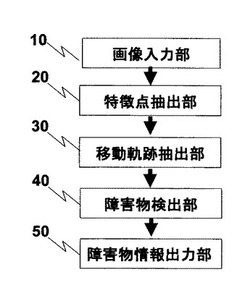
【目的】1台のTVカメラを用い、自車両進行情報前方に飛び出してくる危険な障害物を検出する画像処理装置を提供する。
【構成】画像入力部10では、移動体に取り付けられた1台のTVカメラから時系列画像を取得し、特徴点抽出部20では、原画像の中から障害物の接地位置に属している接地特徴点を抽出し、移動軌跡抽出部30では、接地特徴点の画像上での移動軌跡を抽出し、障害物検出部40では、抽出された移動軌跡の終点が消失点と移動軌跡の始点を結んだ直線よりも画像上で移動体の存在する方向に近い位置にある場合に接地特徴点が障害物に属すると判定する。
(もっと読む)
車両の走行制御装置

【課題】 車両が停止中にシフトレバーなどの操作をした場合でもドライバの意図することなく車両が走行することを防止することができる走行制御装置を提供する。
【解決手段】 車間制御ECU2は、車間制御部21および制御解除部22を備えている、車間制御部21は、先行車両との車間距離や車両の車速に基づいて、先行車両を追従する先行車両追従制御を行う。制御解除部22は、車両の走行中にシフトポジションがニュートラルレンジとされた場合に車間制御部21の制御を解除する。また、車両の停止中にシフトポジションがニュートラルレンジとされた場合に車間制御部21による車間制御の制御解除を中止する。
(もっと読む)
仮想車線表示装置
【課題】視界が悪い場合に、運転者にとってより的確に仮想車線を表示する。
【解決手段】車両外部の撮像画像を画像解析することで、視認性が良くない状態を判断し、更に、運転者にとって、視認性が良くないことが原因で運転操作がしにくい状況か否かを判断するために、運転操作の変化と運転者の生体情報の変化を検出する。
そして、視認性が悪く、それが原因で運転操作に影響が出ると共に生体情報が異常になっている場合に、仮想車線を表示する。
表示した仮想車線は、生体情報が正常に戻った時点で消去する。
(もっと読む)
表示制御装置
【課題】乗員にとって有効で、視認性や操作性が良好な情報を表示することができる表示制御装置を提供すること。
【解決手段】車両の乗員の着座位置を検出し(ステップS10)、この検出した乗員の着座位置を基準として車載アプリケーション毎の画像情報の属性を含む画像属性情報に基づいてディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報を決定し(ステップS20)し、この決定したディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報をディスプレイ6a、6b、・・・、6nに表示する(ステップS30)。
(もっと読む)
車両用走行制御装置
【課題】定速走行制御時に車線逸脱防止制御が作動して車両が減速した後に、再び車両が加速されるのを防ぐ。
【解決手段】定速走行制御が行われている時に、車線逸脱防止制御が作動した場合に、車線逸脱防止制御が作動した後の車速が設定速度より低い場合には、設定速度を、車線逸脱防止制御後の車速に変更する。これにより、車線逸脱防止制御が作動して、車速が低下した後に、車両が設定速度まで加速されるのを防ぐことができる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両の予測進路と前方障害物との重なり度合および運転者の追い越し意図を考慮して車両制御を行う車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、前方障害物との接触のリスクが高い場合には、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。自車両が前方障害物を追い越す意図があると判断されると、自車両の予測進路と前方障害物との重なり度合に応じて駆動力の低下量を小さくするとともに、アクセルペダルに発生する操作反力を小さくする。アクセルペダル操作状態を自車速に応じて設定される閾値と比較して、運転者の追越意図を判断する。追越意図ありと判断された場合は、自車速が速いほど駆動力および操作反力の調整量を大きくする。
(もっと読む)
車両のクルーズ走行制御装置
【課題】 ドライバに対しクルーズ設定車速を制限車速以下の安全な車速まで減速することを促すことができる車両のクルーズ走行制御装置を提供すること。
【解決手段】 走行中にスイッチ操作を行うと、スイッチ操作時の車速をクルーズ設定車速とし、原則的にクルーズ設定車速を維持する走行制御を行うクルーズ走行制御手段を備えた車両のクルーズ走行制御装置において、自車が走行する道路の制限車速情報を収集する制限車速情報収集手段を設け、前記クルーズ走行制御手段は、前記クルーズ設定車速が前記制限車速を超過している場合、速度超過情報をドライバに伝達する手段とした。
(もっと読む)
先行車追従制御装置
【課題】先行車追従制御が行われており、かつ、車両の停止保持制御が行われている状態で、先行車追従制御を終了する操作が行われても、車両の停止保持を継続する。
【解決手段】先行車追従制御が行われている時に、車両が停止すると、EPKB11によって車両の停止保持制御を行う。この状態で、先行車追従制御を終了する操作がドライバによって行われると、EPKB11による車両の停止保持を継続した状態で、先行車追従制御だけを終了する。
(もっと読む)
車両制御装置及び車両制御方法
【課題】案内交差点において車両を十分快適に走行させることができるようにする。
【解決手段】現在地を検出する現在地検出部と、経路案内で案内される案内交差点における進入レーン及び退出レーンを判断するレーン判定処理手段と、前記進入レーン及び退出レーンに基づいて、案内交差点内の走行軌跡を予測する走行軌跡予測処理手段と、前記走行軌跡に基づいて車両制御を行う車両制御処理手段とを有する。進入レーン及び退出レーンに基づいて走行軌跡が予測され、走行軌跡に基づいて車両制御を行うことができる。
(もっと読む)
車両の速度超過防止方法
【課題】 速度超過の程度を的確に判断し、過大な速度超過を防止することができる車両の速度超過防止方法を提供する。
【解決手段】 車両が走行中に、車速vと、同じタイミングで取得される走行中の道路での制限速度との差を、単位時間毎に算出する。(a)は、縦軸の車速および制限速度と横軸の時間との関係の例を示す。単位時間t1での差v1=車速−制限速度とし、S1=v1×t1とすると、S1は、(b)に示すような部分の面積となり、距離の次元を有する。車速の超過分と単位時間t1との積S1を算出することを繰返し、積S1,S2,…,Snの積算値ΣSが予め定める判定基準値を超える場合に、速度超過と判定して、予め定める速度超過防止対策を実行する。
(もっと読む)
内燃機関制御装置
【課題】 衝突の危険性が高い場合に、強いエンジンブレーキを発生することができる内燃機関制御装置を提供する。
【解決手段】 衝突の危険度を判定する衝突危険度判定装置40と、衝突等の危険を検知すると、エンジン1の点火時期を所定角度進角させて、エンジン1に逆回転方向のトルクを発生させるECU30とを有している。エンジン1に逆回転方向のトルクを発生させることで、より強いエンジンブレーキをかけることができる。従って車両の衝突等を防止することができる。
(もっと読む)
走行支援システム、及び走行支援装置
【課題】運転者の好みに適した、またより安全な運転に繋がる走行支援を実現する走行
支援システムを提供すること。
【解決手段】自車両の走行を支援するための走行支援システムにおいて、予め道路種別
毎に設定された運転者が希望する希望走行速度に基づいて、現在走行中の道路、又は現在
位置よりも所定の距離先方で走行することになる道路での希望走行速度と自車両の現在の
走行速度とを比較する速度比較手段と、この比較結果に基づいて、所定の走行支援処理を
行う走行支援手段とを装備する。
(もっと読む)
車両運動推定装置及び移動体検出装置
【課題】走行中の車両のヨー角変動などの姿勢変化を正確に認識または排除する。また、車両がヨーレートを有する場合にも、歩行者などと静止物とを正確に識別する。
【解決手段】グループ化手段210は、スキャン型のレーザーレーダ100Bを用いて得られた距離データ(距離と方位)を処理する。即ち、現時刻の全観測点の中から、互いに距離が近い観測点をまとめてグループ化する。対象物追跡手段221は、グループ化した物体をそれぞれ周知の追尾フィルタであるα−βフィルタを用いて追跡し、同一の測定対象物として同定された測定対象物の中から所定の範囲内の広がりwを示すものについてのみ、その運動を移動体変位量算定手段222に対して出力する。移動体変位量算定手段222では、車両運動推定装置100から得られた自車両の運動Yを、上記の測定対象物の見かけ上の運動から差し引く。
(もっと読む)
車両用表示装置
【課題】 車両状態や走路形状に応じた表示を行うことによって、走路に対する安全な運転操作を支援できる車両用表示装置を提供する。
【解決手段】 記憶媒体14に格納された三次元情報からなるデジタルマップデータに基づいて走路形状を表示する表示器2と、車両Aの現在位置を検出する位置検出手段13と、位置検出手段13により検出された車両Aの現在位置に基づいて前記デジタルマップデータを読み出して車両Aの前方側の走路形状を表示器2に表示させる制御手段17と、を備える車両用表示装置であって、制御手段17は、前記走路形状および車両Aの走行速度に基づいて、車両Aが減速して走行するべき箇所を表示器2に表示させる。
(もっと読む)
車両の走行安全装置
【課題】 車両の進行方向前方に存在するカーブを通過する際において、適切に安全装置を作動させる。
【解決手段】 作動部64は、カーブ認識部61での道路データに基づく認識結果および比較部63での比較結果に応じて、警報装置およびブレーキアクチュエータ15等からなる安全装置を作動させることを判定した際に、カーブ認識部61にて認識されたカーブの形状とは異なる道路形状が道路形状認識部65により認識されているとき、安全装置の作動を禁止または抑制する。認識カーブ修正部67は、作動部64により安全装置の作動が禁止または抑制された際に、カーブ認識部61および道路形状認識部65によりカーブが認識されている場合、カーブ認識部61が認識したカーブの入口位置を道路形状認識部65が認識したカーブの入口位置に基づき修正する。
(もっと読む)
車両の走行安全装置
【課題】 予め記憶している道路データに基づく車両の走行安全性を確保しつつ、道路データの修正に要する演算量が過剰に増大することを抑制する。
【解決手段】 カーブ推定部65はカーブ認識部61での道路データに基づく認識結果および比較部63での比較結果に応じて、安全装置が作動している状態での自車両のカーブの通過状態に基づき、カーブの実形状(例えば、極性、半径、曲率、深さ等)を推定する。データ修正部66は、カーブ推定部65にて推定された推定形状と、カーブ認識部61にて認識された認識形状とが同等となるようにして、地図データ記憶部23の道路データを修正する。作動部64は、カーブ推定部65にて推定された実カーブの推定形状が、カーブ認識部61にて認識された地図カーブの認識形状よりも緩いとき、安全装置の次回以降の作動時において安全装置が作動し難くなるように設定する。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
車両制御装置
【課題】 本発明は、連続コーナにおいても効果的な車両制御を実現できる車両制御装置の提供を目的とする。
【解決手段】 2以上のコーナが連続する連続コーナにおける車両制御のための車両制御装置であって、進行方向前方の連続コーナを検出する手段と、前記連続コーナの形状に関するコーナ情報を取得する手段と、前記コーナ情報に基づいて、前記連続コーナの各コーナ手前の減速可能区間における車両の目標走行態様を決定する目標走行態様決定手段と、前記決定された目標走行態様に従って、前記減速可能区間において警告発令及び/又は減速制御を実行する介入制御手段とを備え、前記目標走行態様決定手段は、一のコーナ手前の減速可能区間における前記目標走行態様を、該一のコーナ以降のコーナ形状を加味して決定する。
(もっと読む)
車両の走行安全装置
【課題】 車両の進行方向前方のカーブを通過する際に、適切に安全装置を作動させる。
【解決手段】 環境検知部65は外界センサ16の画像処理データの状態つまり撮影結果の良否又は撮影環境の良否を検知する。作動部64は環境検知部65の検知結果に基づき認識可能距離LRを可変設定し、自車両の現在位置からカーブまでの距離が認識可能距離LR以上の場合には道路データに対する認識結果に基づき、認識可能距離LR以下の場合には画像処理データの認識結果に基づき安全装置を作動させる。作動部64は自車両の現在位置からカーブまでの距離が認識可能距離LR以下であっても撮影環境が不良と判定された場合には、画像処理データの代わりに道路データに対する認識結果に基づき、あるいは、周囲環境の良否程度に応じて設定した画像処理データ及び道路データの重み付けに基づき安全装置を作動させる。
(もっと読む)
車両の走行安全装置
【課題】 車両の進行方向前方に存在するカーブを通過する際において、適切に安全装置を作動させる。
【解決手段】 第1カーブ認識部61aは地図データ記憶部23に記憶された道路データに基づき、第2カーブ認識部61bは外界センサ16から出力される画像処理データに基づき、自車両の進行方向に存在するカーブを検出する。比較部63は、自車両の現在位置からカーブまでの距離が、外界センサ16のカメラ16aの撮影可能距離に係る第2カーブ認識部61bの認識可能距離以下においては、第1カーブ認識部61aによる認識結果によらず、現在速度VPが第2カーブ認識部61bの認識結果に基づき設定された適正速度VS以下であるか否かを判定する。作動部64は、比較部63での比較結果に基づいてエンジン制御部42および変速制御部43およびブレーキ制御部44の作動を制御する。
(もっと読む)
1 - 20 / 32
[ Back to top ]