
Fターム[3D044AA36]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・目的 (680) | 危険回避、安全性向上 (259) | 警報 (49) | 制限車速、設定車速超過時 (12)
Fターム[3D044AA36]に分類される特許
1 - 12 / 12
定速走行制御装置及び制御方法
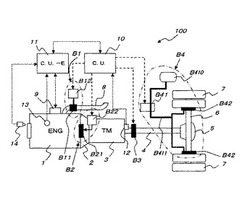
【課題】オートクルーズ走行時で、降坂時のオーバーシュート量を抑制し、一定走行時の速度安定性を確保すること。
【解決手段】主制動装置B4と、複数の補助制動装置B1〜B3と、燃料噴射制御手段11と、定速走行制御を行うべく燃料噴射制御手段11をして燃料噴射量を制御せしめ且つ主制動装置B1及び複数の補助制動装置B1〜B3の作動を制御する定速走行制御手段10と、車速検出手段12と、エンジン負荷検出手段13と、を有する車両において、定速走行制御手段10は降坂時に目標車速に対して実車速が超過した場合に、最初に最も制動能力の低い補助制動装置B1を作動させ、それでも目標車速に対する実車速が超過していれば、次に制動能力の低い補助制動装置から順に作動させるべき補助制動装置B1〜B3を追加し、最後に主制動装置B4を作動させるべき制動装置に追加するように制御する。
(もっと読む)
車両制御装置、その制御方法及びプログラム

【課題】 低速走行エリアでの安全な走行を実現することができる車両制御装置を提供する。
【解決手段】 駆動源としてモータ3を少なくとも備え、車両の走行を画面の表示によって案内するナビゲーションシステムを搭載した車両1のコントローラ10であって、ナビゲーションシステム21からの通知により、低速走行が必要な低速走行エリアに接近したことを検出すると、モータ3への駆動電流を制限し、車速が所定値以上にならないように制御する。従って、ドライバの誤操作によってアクセル踏み込み量が大きくなっても車両速度を制限することができ、低速走行エリアでの安全な走行を実現することができる。このため、ドライバや周囲の安全も確保することができる。
(もっと読む)
車両用制御装置
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
(もっと読む)
車両交通量の安定化制御のための方法及び装置
【課題】 高速道路ないし鉄道軌道等の自動車ないし車両交通において格別の障害物の存在しない場合でも発生しうる渋滞現象を改善するための方策であって、運転者が有効かつ安全に制御に組み入れられる方策を提案する。
【解決手段】 マンマシン系として作業を分担させ、車間距離ならびに速度制御機能を運転者に行わせる一方で、車間距離列安定化のための制御量を自動計算し、各車で加算配合して加える方法及び装置を提供する。車間距離の安定化は、先行車からの加減速情報を適切に積算し後方にリレー伝達させる分散制御法で実現される。これにより、車間距離計測そのものを要求せずに車間距離列の安定化が可能になり、装備化も容易で、運転者が局所制御を依然担えるために安全性が確保できる方式が実現できる。本制御は車間制御であり、またその結果として得られる渋滞解消を含む交通量の安定化制御法である。
(もっと読む)
停車制御装置
【課題】 本発明は、後続車を考慮して自車を停止させる制御の実行をより適切にする停車制御装置の提供を目的とする。
【解決手段】 設定された停車位置に自車を停止させる制御を実行する停車制御装置において、自車の位置から所定距離L2以内に停車位置がある場合は、アクセルOFFを推奨する案内をして惰行運転をさせるようにし、また、所定距離L2以内に停車位置がある場合に後続車がいるときには、自車と後続車との相対速度に基づいてアクセルOFFの推奨案内をするのに適している車間関係であるのか否かを判断し、適していないと判断された場合にはその推奨案内を行わない停車制御装置。
(もっと読む)
制動制御システム
【課題】 自動車におけるブレーキなどの制動装置を制御し、車速を目標速度以下に維持しつつ坂路を降板する際に快適性を維持する。
【解決手段】 制動制御システム1000において、CPU110は、坂路の登坂が開始されると、傾斜角計500によって検出される傾斜角を、登坂開始位置を基点とする位置に対応付けた傾斜角データとしてRAM130に記憶する。坂路の頂上ではトリガ位置が決定され、CPU110は、RAM130に記憶される傾斜角データに基づいて、このトリガ位置を基点とし、登坂開始位置を終点とする目標速度設定対象区間について、降坂時の目標速度を設定する。坂路降坂時には、このトリガ位置が検出されることにより速度維持モードが実行され、車両10の車速が予め設定された目標速度を超えないようにブレーキアクチュエータ200が制御される。
(もっと読む)
走行支援システム、及び走行支援装置
【課題】運転者の好みに適した、またより安全な運転に繋がる走行支援を実現する走行
支援システムを提供すること。
【解決手段】自車両の走行を支援するための走行支援システムにおいて、予め道路種別
毎に設定された運転者が希望する希望走行速度に基づいて、現在走行中の道路、又は現在
位置よりも所定の距離先方で走行することになる道路での希望走行速度と自車両の現在の
走行速度とを比較する速度比較手段と、この比較結果に基づいて、所定の走行支援処理を
行う走行支援手段とを装備する。
(もっと読む)
車両の速度制限装置
【課題】 運転者が制限速度を守らずに運転しようとしたり、制限速度の変化に気づかなかった場合等でも、車両の走行速度を制限速度以下に制御する。
【解決手段】 自車両が走行する場所の制限速度を取得する制限速度取得手段2、3、4と、制限速度取得手段が取得した制限速度以下になるように、自車両の走行速度を制限する速度制限手段7とを備える速度制限装置1。市販されている自動車等の車両が走行可能な最高速度を、速度制限装置1によって、自車両が走行する場所の制限速度以下になるように制御する。制限速度取得手段は、自車両の現在位置を検出する自車両位置検出部3と、自車両が走行する道路データを記憶した道路データ記憶部4と、自車両の現在位置に対応する道路データから制限速度を取得する制御部5とを備える。速度制限手段は、自車両のエンジン制御系に制限信号を発して走行速度を制限する。
(もっと読む)
車両の走行安全装置
【課題】 予め記憶している道路データに基づく車両の走行安全性を確保しつつ、道路データの修正に要する演算量が過剰に増大することを抑制する。
【解決手段】 カーブ推定部65はカーブ認識部61での道路データに基づく認識結果および比較部63での比較結果に応じて、安全装置が作動している状態での自車両のカーブの通過状態に基づき、カーブの実形状(例えば、極性、半径、曲率、深さ等)を推定する。データ修正部66は、カーブ推定部65にて推定された推定形状と、カーブ認識部61にて認識された認識形状とが同等となるようにして、地図データ記憶部23の道路データを修正する。作動部64は、カーブ推定部65にて推定された実カーブの推定形状が、カーブ認識部61にて認識された地図カーブの認識形状よりも緩いとき、安全装置の次回以降の作動時において安全装置が作動し難くなるように設定する。
(もっと読む)
車両の走行安全装置
【課題】 車両の進行方向前方に存在するカーブを通過する際において、適切に安全装置を作動させる。
【解決手段】 第1カーブ認識部61aは地図データ記憶部23に記憶された道路データに基づき、第2カーブ認識部61bは外界センサ16から出力される画像処理データに基づき、自車両の進行方向に存在するカーブを検出する。比較部63は、自車両の現在位置からカーブまでの距離が、外界センサ16のカメラ16aの撮影可能距離に係る第2カーブ認識部61bの認識可能距離以下においては、第1カーブ認識部61aによる認識結果によらず、現在速度VPが第2カーブ認識部61bの認識結果に基づき設定された適正速度VS以下であるか否かを判定する。作動部64は、比較部63での比較結果に基づいてエンジン制御部42および変速制御部43およびブレーキ制御部44の作動を制御する。
(もっと読む)
定速走行制御装置を具備する車両の走行安全装置
【課題】 定速走行制御の実行時に車両の進行方向前方に存在するカーブを通過する際に、定速走行制御装置と安全装置の作動とを協調的に適切に制御する。
【解決手段】 定速走行制御部65は操作者により定速走行制御の作動が指示されると、予め設定された適宜の目標速度VOを維持するようにして車両を自動的に加速または減速させて速度制御を行う。目標車速修正部67は、定速走行制御の実行時に車両の現在速度VPがカーブ認識部61にて認識されたカーブの適正速度VSよりも大きい状態で、運転者の加速操作に対する解除もしくは操作量の減少、例えばアクセルペダル操作の解除やアクセルペダルの踏み戻し操作等を検出した場合には、運転者が減速意志を有していると判断し、この検出タイミングでカーブの適正速度VSを定速走行制御の目標速度VOとして設定する。
(もっと読む)
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
1 - 12 / 12
[ Back to top ]