
Fターム[3D044AC56]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両外部状況に関するもの (369) | 道路状況 (314)
Fターム[3D044AC56]の下位に属するFターム
Fターム[3D044AC56]に分類される特許
1 - 20 / 113
表示システム、移動体、表示方法、表示プログラムおよびその記録媒体
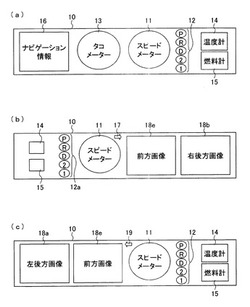
【課題】 車両等の移動体における進行方向前方の画像と、進行方向に対して左後方または右後方の画像とを容易かつ適切に認識できる表示システムを提供する。
【解決手段】 撮像部によって、上記移動体の進行方向前方の画像である前方画像18eと、上記移動体の進行方向に対して左右後方の画像18a,18bとを撮影し、上記前方画像18eと、上記左後方画像18aまたは右後方画像18bとを、表示パネル10に表示させる。
(もっと読む)
車両用表示装置

【課題】メータパネル内においてメータ画像等とナビゲーション画像を混在させて表示させる場合に、より更新頻度が高い画像等に対する運転者の認識度合いを高めること。
【解決手段】TFT表示器30は、その表示領域が、左右両側に配置されたメータ表示領域31と、メータ表示領域31の速度メータ画像31aとタコメータ画像31bとの間に配置されたナビ表示領域32と、ナビ表示領域32の下方に配置された車両状態表示領域33と、ナビ表示領域32の上方に配置された車両状態表示領域34と、に分けられている。そして、車両状態表示領域34に表示される各種情報についてはその更新頻度がナビ表示領域32に表示されるナビゲーション画像の更新頻度よりも高くなっており、上述の車両状態表示領域33に表示される各種情報についてはその更新頻度がナビ表示領域32に表示されるナビゲーション画像の更新頻度よりも低くなっている。
(もっと読む)
車両用表示装置
【課題】車両乗員へ与える煩わしさを軽減することが可能な車両用表示装置を提供する。
【解決手段】車両用表示装置1は、自車両前方に交差点が複数存在する場合、それら交差点間の距離に応じて、表示処理を変更して側方映像の表示動作を異ならせる。このため、例えば交差点間の距離が近い場合には、自車両側方映像の表示についてオン/オフが連続しないように表示処理を変更することが可能となる。
(もっと読む)
車両速度制御装置および同装置における目標速度設定方法ならびにプログラム
【課題】マップマッチングなどの自車両位置誤差補正による急激な目標速度値の変化を予め考慮して誤差のない状態での目標速度値よりも事前に速度変化を与え、速度の急変、目標地点の超過を防ぎ、安全で快適なドライビングが行えるようにする。
【解決手段】車両速度制御装置(目標速度計算部15)は、誤差を含む可能性のある地図情報および位置測位手段が与える現在位置情報から得られる目標速度値に、誤差がどの程度含まれているかを示す位置誤差確率を推定演算し(現在位置誤差推定部13)、かつ、人間の感性モデル(人間感性モデルDB14)から搭乗者が不快に感じない速度制御パターンを生成して、車両の現在位置から目的地に至る経路での速度制御目標値を、速度制御コントローラ16の要求精度に従う許容誤差範囲から計算し、制御する構成とした。
(もっと読む)
車両の定速走行制御システム
【課題】 定速走行制御状態で走行抵抗の変動が生じるルートを走行する際、一定速走行機能を損なうことなく、エネルギー消費率の向上と、トルク変動ショックの抑制と、を達成することができる車両の定速走行制御システムを提供すること。
【解決手段】定速走行制御手段を備えた車両の定速走行制御システムにおいて、自車の走行ルート上での走行抵抗の変動に対し、出力トルク補正制御を行わなくても車速が許容車速内に収まると推定されるトルク制御中断領域を予め設定するトルク制御中断領域設定手段を設け、前記定速走行制御手段は、定速走行制御中、自車が設定されたトルク制御中断領域内に入ると、動力源の出力トルク補正制御による定速走行制御を中断し、自車が設定されたトルク制御中断領域を抜けると、動力源の出力トルク補正制御による定速走行制御を再開する手段とした。
(もっと読む)
エンジン制御装置及びエンジン制御方法
【課題】エンジン制御においてアイドル条件が成立しても車速の調整を容易にし、かつ無駄なエネルギーの消費を減少させる。
【解決手段】本発明のエンジン制御装置においては、渋滞などの影響で車両がアイドリング状態でクリープ走行しているような場合でも、基本的にエンジン回転数に基づく回転数制御ではなくオートクルーズ制御が行われる。このため、車両が低速域で走行している場合にも車速の微調整が容易になる。その結果、基本的にブレーキ制御を伴わないか或いはブレーキ制御が抑制され、車両の低速走行時における無駄なエネルギーの消費を減少させることができる。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】先行車の判定対象とする立体物と自車両との間に生じる様々な要因を考慮して、先行車の判定を正確且つ素早く行え、自然な感覚の制御となり使い勝手が良い。
【解決手段】車外監視装置4は、自車進行路を推定し、この自車進行路を基に判定領域を設定する。この判定領域は、自車進行路を基に設定する基本走行領域を基に、判定対象とする立体物が現在先行車として選択しているものである場合、また、判定対象が予め設定する以前に先行車として選択していたものである場合は、判定対象と自車両との間の判定領域を狭く補正し、判定対象に対して自車両が接近する場合、接近していく相対速度の大きさに応じて判定領域の遠方側の領域を狭く補正し、また、自車両の旋回方向の側に判定領域を拡大補正し、自車両が高速道路を走行している場合は判定領域を拡大補正し、追従走行制御手段で設定される先行車の位置に応じて判定領域を拡大補正する。
(もっと読む)
車両用走行制御装置
【課題】自車が走行する道路の種類に基づいて最適な走行制御手段を実行させる車両用走行制御装置を提供することを目的とする。
【解決手段】車両を設定速度で走行させる定速走行制御手段10と車両を設定車間距離で走行させる追従走行制御手段11とを有する車両用走行制御装置1は、車両位置における道路の種類を識別する道路種類識別手段12と、道路種類識別手段12により識別された道路の種類に基づいて、実行する走行制御手段を選択する走行制御選択手段13とを備える。
(もっと読む)
車両の制御装置及び車両制御用情報の車両間相互利用システム
【課題】メモリに記憶している環境情報がクリアされてしまった場合でも、環境情報を用いた車両の制御を高い制御精度で継続して行えるようにする。
【解決手段】記憶手段12Aの記憶内容がクリアされた場合、車車間通信手段16Aによって自車両2Aを基準とする所定エリア内の他車両2Bに対し、他車両2Bが有する環境情報の送信を要求する。そして、他車両2Bから送信された環境情報を取得し、自車両2Aに関する環境情報として記憶手段12Aに記録する。
(もっと読む)
車速制限制御装置
【課題】本発明は、制限速度の設定操作におけるドライバーの利便性を向上させる車速制限制御装置の提供を目的とする。
【解決手段】設定された制限速度を超えないように車速を制御する車速制限制御を実行する車速制限制御装置において、制限速度を設定するための操作手段を備え、停車時の場合には前記操作手段による操作によってセットされる制限速度は事前に指定された初期値であり(ステップ6)、実車速が零より大きく所定速度以下(不感帯内)である場合には前記操作手段による制限速度のセット操作を禁止し(ステップ10)、実車速が不感帯を超えている場合には前記操作手段による操作によってセットされる制限速度は実車速に基づく値である(ステップ12)、車速制限制御装置。
(もっと読む)
ナビ協調走行制御装置
【課題】先行車の走行状態に応じて、安全かつ快適な走行性を確保する追従制御を行う走行制御装置を提供する。
【解決手段】地形情報推定装置102及び車間距離センサ101を用いて、先行車と自車の位置の勾配を求め、勾配により短縮あるいは増加すると予想される車間距離を算出する。予想される車間距離の増加量を反映した車間距離を目標車間距離として、ACC装置の車間距離制御部に与え、エンジン制御装置105やブレーキ制御装置104を補正制御する。
(もっと読む)
車間距離制御装置
【課題】自車両と先行車両との車間距離を制御する際に乗員が自車両の走行挙動に違和感を感じてしまうことを防止する。
【解決手段】走行制御部25は、先行車両と自車両との間の実車間距離を目標車間距離に収束させる際に、運転者の加速意志が運転意志検出部23により検出された場合には、加速意志が検出されない場合に比べて、オーバーシュート量が増加するように収束特性を変更し、運転者の減速意志が運転意志検出部23により検出された場合には、減速意志が検出されない場合に比べて、オーバーシュート量が減少するように収束特性を変更する。
(もっと読む)
表示制御装置
【課題】乗員にとって有効で、視認性や操作性が良好な情報を表示することができる表示制御装置を提供すること。
【解決手段】車両の乗員の着座位置を検出し(ステップS10)、この検出した乗員の着座位置を基準として車載アプリケーション毎の画像情報の属性を含む画像属性情報に基づいてディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報を決定し(ステップS20)し、この決定したディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報をディスプレイ6a、6b、・・・、6nに表示する(ステップS30)。
(もっと読む)
定速走行制御装置及び制御方法
【課題】オートクルーズ走行時で、降坂時のオーバーシュート量を抑制し、一定走行時の速度安定性を確保すること。
【解決手段】主制動装置B4と、複数の補助制動装置B1〜B3と、燃料噴射制御手段11と、定速走行制御を行うべく燃料噴射制御手段11をして燃料噴射量を制御せしめ且つ主制動装置B1及び複数の補助制動装置B1〜B3の作動を制御する定速走行制御手段10と、車速検出手段12と、エンジン負荷検出手段13と、を有する車両において、定速走行制御手段10は降坂時に目標車速に対して実車速が超過した場合に、最初に最も制動能力の低い補助制動装置B1を作動させ、それでも目標車速に対する実車速が超過していれば、次に制動能力の低い補助制動装置から順に作動させるべき補助制動装置B1〜B3を追加し、最後に主制動装置B4を作動させるべき制動装置に追加するように制御する。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。
(もっと読む)
車両の駆動力制御装置
【課題】車両がトンネルの出入口付近を走行中に、運転者のアクセルペダルの誤操作による急激な加速を抑制する。
【解決手段】
本発明における車両の駆動力制御装置は、車両の現在位置からトンネルの出入口までの距離に基づいて加速度の上限値を設定し(30)、目標加速度が上限値を超える場合は目標加速度を上限値に制限して(30)、エンジン及び変速機の少なくとも一方によって車両の駆動力を制御する(7、8)。
(もっと読む)
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L2が所定の車間距離Lmよりも短くなったときは短くなっていないときよりも車速制御手段17,18の制御感度を鈍化させるコントロールユニット10を備えている。
(もっと読む)
自動車の追従走行装置
【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L3が所定の車間距離Lmよりも短くなったときは前々方車両Wffと自車両Wとの車間距離L2が第2の目標車間距離設定手段10で設定された目標車間距離Ltに維持されるように自車両Wの車速vを制御するコントロールユニット10を備えている。
(もっと読む)
車両用表示装置
【課題】画像表示部におけるナビゲーション画像とシフトポジション画像との表示切替が可能な車両用表示装置を提供すること。
【解決手段】シフトチェンジ操作が行われていないときには、画像表示部163にナビゲーション画像Nを表示する(ステップS220、ステップS230でNo)。一方、シフトチェンジ操作が行われたときには(ステップS230でYes)、シフトポジション画像SHの表示に切り替える(ステップS160)。
(もっと読む)
ハイブリッド車の定速走行制御装置
【課題】 定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができるハイブリッド車の定速走行制御装置を提供すること。
【解決手段】 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定する手段とした。
(もっと読む)
1 - 20 / 113
[ Back to top ]