
Fターム[3D044AC57]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両外部状況に関するもの (369) | 道路状況 (314) | 傾斜 (18)
Fターム[3D044AC57]に分類される特許
1 - 18 / 18
車両の定速走行制御システム
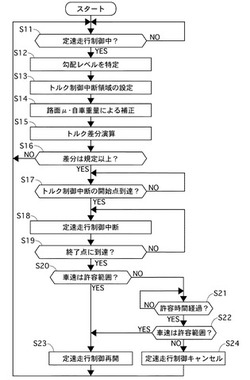
【課題】 定速走行制御状態で走行抵抗の変動が生じるルートを走行する際、一定速走行機能を損なうことなく、エネルギー消費率の向上と、トルク変動ショックの抑制と、を達成することができる車両の定速走行制御システムを提供すること。
【解決手段】定速走行制御手段を備えた車両の定速走行制御システムにおいて、自車の走行ルート上での走行抵抗の変動に対し、出力トルク補正制御を行わなくても車速が許容車速内に収まると推定されるトルク制御中断領域を予め設定するトルク制御中断領域設定手段を設け、前記定速走行制御手段は、定速走行制御中、自車が設定されたトルク制御中断領域内に入ると、動力源の出力トルク補正制御による定速走行制御を中断し、自車が設定されたトルク制御中断領域を抜けると、動力源の出力トルク補正制御による定速走行制御を再開する手段とした。
(もっと読む)
ナビ協調走行制御装置

【課題】先行車の走行状態に応じて、安全かつ快適な走行性を確保する追従制御を行う走行制御装置を提供する。
【解決手段】地形情報推定装置102及び車間距離センサ101を用いて、先行車と自車の位置の勾配を求め、勾配により短縮あるいは増加すると予想される車間距離を算出する。予想される車間距離の増加量を反映した車間距離を目標車間距離として、ACC装置の車間距離制御部に与え、エンジン制御装置105やブレーキ制御装置104を補正制御する。
(もっと読む)
車間距離制御装置
【課題】自車両と先行車両との車間距離を制御する際に乗員が自車両の走行挙動に違和感を感じてしまうことを防止する。
【解決手段】走行制御部25は、先行車両と自車両との間の実車間距離を目標車間距離に収束させる際に、運転者の加速意志が運転意志検出部23により検出された場合には、加速意志が検出されない場合に比べて、オーバーシュート量が増加するように収束特性を変更し、運転者の減速意志が運転意志検出部23により検出された場合には、減速意志が検出されない場合に比べて、オーバーシュート量が減少するように収束特性を変更する。
(もっと読む)
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
車両の加速度算出装置及び車両の走行制御装置
【課題】 加速度算出値に含まれるノイズを抑制できると同時に、フィルタ処理を行う際に応答遅れが大きくならないようにした、車両の加速度算出装置及びこれを用いた、車両の走行制御装置を提供する。
【解決手段】 車両の車速情報を検出する車速検出手段100と、該車速検出手段によって検出された該車速情報を時間微分することにより予め設定された演算周期毎に該車両の車速微分値を加速度情報として算出する車速微分値算出手段107とをそなえ、該車速微分値算出手段107は、演算周期nにおいて入力された該車速情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された該車速情報とに基づいて、該加速度情報を算出する。
(もっと読む)
車両制御装置、その制御方法及びプログラム
【課題】 低速走行エリアでの安全な走行を実現することができる車両制御装置を提供する。
【解決手段】 駆動源としてモータ3を少なくとも備え、車両の走行を画面の表示によって案内するナビゲーションシステムを搭載した車両1のコントローラ10であって、ナビゲーションシステム21からの通知により、低速走行が必要な低速走行エリアに接近したことを検出すると、モータ3への駆動電流を制限し、車速が所定値以上にならないように制御する。従って、ドライバの誤操作によってアクセル踏み込み量が大きくなっても車両速度を制限することができ、低速走行エリアでの安全な走行を実現することができる。このため、ドライバや周囲の安全も確保することができる。
(もっと読む)
クルーズ制御装置
【課題】クルーズ制御に際し、実際の車速を目標速度により適切に追従させることのできるクルーズ制御装置を提供する。
【解決手段】ステップS14では、車両の加速度aに基づき、車両の走行方向に働く力を算出する。続くステップ16では、車速と目標速度との差と、車両に働く力とに基づき、車両を目標速度に保つために必要な駆動力を算出する。ステップS22では、算出される駆動力を、エンジンの出力と、ABSの制動力とに振り分け、ステップS24、S26では、振り分けられた出力や制動力を得られるような設定がなされる。
(もっと読む)
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
(もっと読む)
車両用制御装置
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
(もっと読む)
車両の減速制御装置
【課題】前車との位置関係を適正にするための減速制御を行なうものであって、前車を見失ったときに運転者に違和感の少ない制御が行なわれる車両の減速制御装置を提供する。
【解決手段】車両Xと前記車両の前方の前車Pとの位置関係を適正にするために前記車両の減速制御を行う車両の減速制御装置であって、前記前車を検出する手段を備え、前記前車を見失ったときに(S1−N)、前記前車を見失った相対的な時期を推定可能なパラメータに基づいて設定された値(S5)に応じて、前記車両に作用させる減速度を減少させる(S11)。前記パラメータは、前記車両の前方のコーナ又は前記車両が走行しているコーナの曲率又は半径である。前記曲率が大きいとき又は前記半径が小さいときには、前記曲率が小さいとき又は前記半径が大きいときに比べて、小さな割合で前記減速度を漸次減少させる。
(もっと読む)
制動制御システム
【課題】 自動車におけるブレーキなどの制動装置を制御し、車速を目標速度以下に維持しつつ坂路を降板する際に快適性を維持する。
【解決手段】 制動制御システム1000において、CPU110は、坂路の登坂が開始されると、傾斜角計500によって検出される傾斜角を、登坂開始位置を基点とする位置に対応付けた傾斜角データとしてRAM130に記憶する。坂路の頂上ではトリガ位置が決定され、CPU110は、RAM130に記憶される傾斜角データに基づいて、このトリガ位置を基点とし、登坂開始位置を終点とする目標速度設定対象区間について、降坂時の目標速度を設定する。坂路降坂時には、このトリガ位置が検出されることにより速度維持モードが実行され、車両10の車速が予め設定された目標速度を超えないようにブレーキアクチュエータ200が制御される。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
車両の走行安全装置
【課題】 車両の進行方向前方に存在するカーブを通過する際において、運転者の意志を適切に反映させて安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の減速意志が検出された場合には、安全装置の作用を強めるように制御を変更し、ブレーキアクチュエータ15の作動に対しては減速度GSを増大させる。作動部64は、安全装置の制御を変更する際の制御変更量を、車速センサ33から出力される検出信号に加えて、運転者によるアクセルペダルの操作量に係るアクセル開度を検出するアクセル開度センサ51と、運転者によるブレーキペダルの操作量を検出するブレーキペダルセンサ52と、スロットル開度を検出するスロットル開度センサ53と、走行路の路面状態を検出する路面状態検出装置54とから出力される各検出信号に基づき設定する。
(もっと読む)
定速走行制御装置を具備する車両の走行安全装置
【課題】 定速走行制御の実行時に車両の進行方向前方に存在するカーブを通過する際に、定速走行制御装置と安全装置の作動とを協調的に適切に制御する。
【解決手段】 定速走行制御部65は操作者により定速走行制御の作動が指示されると、予め設定された適宜の目標速度VOを維持するようにして車両を自動的に加速または減速させて速度制御を行う。目標車速修正部67は、定速走行制御の実行時に車両の現在速度VPがカーブ認識部61にて認識されたカーブの適正速度VSよりも大きい状態で、運転者の加速操作に対する解除もしくは操作量の減少、例えばアクセルペダル操作の解除やアクセルペダルの踏み戻し操作等を検出した場合には、運転者が減速意志を有していると判断し、この検出タイミングでカーブの適正速度VSを定速走行制御の目標速度VOとして設定する。
(もっと読む)
省燃費運転評価システム
【課題】アクセルワーク(加減速操作)や、変速操作に関するリアルアドバイス表示及び音声警告を必要な場合にのみ表示させ、省燃費運転評価の精度を高めることの出来る省燃費運転評価システムの提供。
【解決手段】計測されたエンジン回転数、アクセル開度、車速、燃料流量及びエンジン負荷から車両1の燃料消費量及び車両の加速度、減速度、走行距離を演算する制御手段(車載コントロールユニット7)とを有し、該制御手段7はアクセル開度、エンジン負荷、加速度が所定値以上で、登坂とは判定してなくて、且つシフトアップを促す表示が非表示の場合にアクセルの踏み過ぎを警告する表示(例えば、「アクセルを踏み過ぎです」)を表示し及び/又は同様の音声警告を発する様に構成されている。
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
1 - 18 / 18
[ Back to top ]