
Fターム[3D044AD00]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御対象 (505)
Fターム[3D044AD00]の下位に属するFターム
推進装置 (274)
クラッチ装置 (4)
変速装置 (57)
ブレーキ装置 (155)
リターダ、排気ブレーキ (4)
Fターム[3D044AD00]に分類される特許
1 - 11 / 11
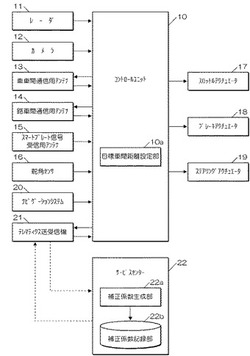
自動車の追従走行システム
【課題】
自車両と前方車両との目標車間距離を維持しながら自車両を前方車両に追従走行させる自動車の追従走行システムにおいて、自車両の走行環境に適合した目標車間距離を迅速・確実に設定することを課題とする。
【解決手段】
追従走行システムは、自車両と前方車両との目標車間距離の設定に用いる補正係数を道路毎及び月日時刻毎の過去の交通情報に基いて生成する生成部22aと、前記補正係数を道路毎及び月日時刻毎に記録する記録部22bと、自車両が走行中の道路を検出するナビゲーションシステム20と、現在の月日時刻を検出するコントロールユニット10とを有し、前記目標車間距離は、前記記録部22bで記録されている補正係数のうちナビゲーションシステム20で検出された道路及びコントロールユニット10で検出された月日時刻に該当する補正係数を用いて設定される。
(もっと読む)
車両用運転支援装置

【課題】先行車を追従する車間距離制御モードにおいて、自車速を制御する際のエンジン出力変動を抑制し、安定した車速制御性を得る。
【解決手段】
エンジン1に供給する吸入空気量を可変するスロットル弁4と、吸入空気量を過給するターボ過給機5と、スロットル弁4とターボ過給機5とによりエンジン出力Tを制御して、自車速Sjを先行車との車間距離に基づいて設定した目標車速Soに収束させるエンジンECU21とを備え、エンジンECU21は、自車を先行車に追従走行させる車間距離制御モード時にターボ過給機5による過給動作を制限し、スロットル弁4の開度制御により自車速Sjを目標車速Soに収束させる。
(もっと読む)
車両走行制御装置
【課題】 低速追従制御と高速追従制御の起動時の運転者の負担を軽減する車両走行制御装置を提供することを課題とする。
【解決手段】 先行車両に追従するために車両の走行状態を制御する車両走行制御装置であって、低速用追従制御手段と、高速用追従制御手段とを備え、低速用追従制御手段の制御開始許可車速領域は、高速用追従制御手段の制御車速領域と重なる車速領域を含まず、高速用追従制御手段の制御開始許可車速領域は、低速用追従制御手段の制御車速領域と重なる車速領域を含むことを特徴とする。
(もっと読む)
車両用安全制御装置
【課題】 車両の衝突事故等を未然に回避できる車両用安全制御装置を提供する。
【解決手段】 周辺環境検出部2によって自車両の周辺環境を検出し、他車両の自車両への衝突危険性を判定する。衝突危険性があると判定された場合には、他車両の回避を行うための回避位置を決めて、自車両がその回避位置に向かって移動できるように速度ベクトルを演算する。このときの回避位置は、道路の道幅や前方に障害物が有るか否か等に応じてパターン化しておく。そして、回避位置までの距離、回避方向、回避目標速度を求め、それを実現するための操舵量や加減速度を求め、操舵制御、ブレーキ制御もしくは駆動力制御を行うことで、自車両を回避位置まで移動させる。これにより、車両の衝突事故等を未然に回避することが可能となるか、もしくは、車両の衝突事故等を未然に防げないにしても衝突から回避できる可能性を向上させることが可能となる。
(もっと読む)
インターチェンジ合流支援装置
【課題】インターチェンジに合流する際のドライバーの負担を軽減すること、合流先のレーンを走行する車両との衝突を避けて安全に合流先のレーンに合流すること、合流先走行レーンを走行する後方車両をやり過ごして、その後方に生ずる空き領域にて合流する判定を行なうことができるインターチェンジ合流支援装置を提供する。
【解決手段】合流先走行レーンの後方車両距離Lrと後方車両速度Vrと前方車両距離Lfと前方車両速度Vfとを検出し、かかる検出結果より演算した目標速度Vtargetへ自車両21の車両速度Vaを制御し、さらに、合流先走行レーンに対する自車両21の位置Pxを演算し、自車両21の位置Pxをもとに演算した目標ハンドル操作角へ自車両21のハンドルの角度を制御する。
(もっと読む)
電動過給機装置
【課題】車両操縦による満足感の向上と加速性の確認性を向上した電動ターボチャージャ装置を提供すること。
【解決手段】電動ターボチャージャ1のターボ駆動モータ3がターボチャージャ2を加速する状況を加速度メータ装置8に視覚表示することにより、いままで通常のターボチャージャ搭載車を運転していたドライバーが通常ターボチャージャ搭載車とは異なる電動ターボチャージャ搭載車の運転フィーリングにとまどうのを防ぐとともに、積極的に電動ターボチャージャの優れた加速フィーリングを楽しむドライバーに対して電動ターボチャージャのターボ駆動モータの運転状況を明示して、運転満足感を向上させる。
(もっと読む)
乗員保護システム、及び乗員保護装置
【課題】乗員、特に子供の安全性を向上させるための乗員保護システムを提供すること
。
【解決手段】車両の乗員の安全性を図るための乗員保護システムにおいて、乗員が大人
であるか子供であるかを判別する大人子供判別手段と、乗員の位置を検出する乗員位置検
出手段と、大人子供判別手段による判別結果、及び乗員位置検出手段による検出結果に基
づいて得られる、子供の乗車状況に応じて、車載機器の制御を行う子供保護制御手段とを
装備する。
(もっと読む)
車両の速度を制御する方法
本発明は、車両の速度を制御するための方法に関する。本発明によれば、将来の交通状況は、被制御車両の加速度に従って予測され、また費用関数の値が、被制御車両の前方を走行する関連する車両の数に従って、またそれらの関連性に従って増加するように規定される費用関数によって評価される。続いて、費用関数が最小値をとる前記加速度の値は、加速度目標値として決定され、また車両の加速度は前記値に設定される。この新規な方法は運転者の安全性及び快適性を向上させる。  (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】この発明の目的は、ETCレーン等のように指定車速以下に減速して走行する必要のある場所を通過する場合に、アクセルペダル及びブレーキペダルがともに踏込み操作されていないときのみ、車両を減速走行させることにより、ドライバーの意志(操作)を尊重し、ドライバーにとって違和感のない走行を実現することにある。
【解決手段】この発明は、車両用走行制御装置において、車両のアクセルペダルの操作状態を検出可能なアクセル状態検出手段と、車両のブレーキペダルの操作状態を検出可能なブレーキ状態検出手段とを備え、減速制御手段は、道路状況検出手段により車両がゲートに接近したことを検出し、アクセル状態検出手段によりアクセルペダルが非踏込み状態であることを検出し、且つブレーキ状態検出手段によりブレーキペダルが非踏込み状態であることを検出したときに、車両を減速走行させることを特徴とする。
(もっと読む)
車間距離制御装置
【課題】 本発明は、車間距離制御装置に関し、先行車両との関係で自車両が自動停車されることにより停止されたレーダによる照射を適当なタイミングで再開させることにより、車間距離制御を的確に実行させることを目的とする。
【解決手段】 車両前方にレーザ光を照射するレーダセンサを用いて先行車両との車間距離を制御するうえで、先行車両の停車に伴って自車両を停車させる車両停車制御を実行させる。車両停車制御により自車両の停車が開始された際には、レーダセンサによるレーザ光の照射を停止させる。そして、レーダセンサによるレーザ光の照射が停止された後、運転者により照射再開スイッチのオン操作が行われた際には、そのレーザ光の照射を再開させる。
(もっと読む)
4輪駆動車の制御装置
【課題】電動パーキングブレーキによって減速を行う際に問題となる、最大制動力の低さと、車両の不安定化を有効に防止する。
【解決手段】電動パーキングブレーキ制御部24は、ブレーキ制御部22から車両挙動を修正させる信号が入力されると、電動パーキングブレーキ30が作動している場合には電動パーキングブレーキ30の作動を解除し、また、主ブレーキ系統異常によるブレーキ制御量が入力されたると、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。更に、ACCシステム25から電動パーキングブレーキ30のブレーキ制御量が入力された場合には、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。そして、前後駆動力配分制御部18は、電動パーキングブレーキ30が作動している際には前軸と後軸とを直結させる。
(もっと読む)
1 - 11 / 11
[ Back to top ]