
Fターム[3D044AE18]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | フィルタ (6)
Fターム[3D044AE18]に分類される特許
1 - 6 / 6
車両の定速走行制御装置
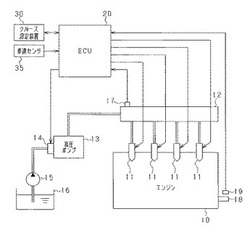
【課題】定速走行中に車両の走行状況が変化した際において車速の追従性の悪化を抑制する。
【解決手段】車両のクルーズ走行中において、気筒別仕事量Sneflt#iを読み出すとともに、該気筒別仕事量Sneflt#iに基づいて燃料補正量ΔQを算出する(ステップS201〜S203)。このとき、基本的に気筒別仕事量Sneflt#iの絶対値が大きいほど、燃料補正量ΔQが大きい値として算出される。そして、車両が減速傾向にあれば、ベース噴射量Qbaseに燃料補正量ΔQを加算して最終の燃料噴射量Qfinを算出する(ステップS205)。また、車両が加速傾向にあれば、ベース噴射量Qbaseから燃料補正量ΔQを減算して最終の燃料噴射量Qfinを算出する(ステップS206)。
(もっと読む)
車間距離情報の処理装置および車間距離制御装置

【課題】 車間距離が急激に変化した場合でも車間距離を速やかに認識できるようにして応答性を向上させることができるようにした、車間距離情報の処理装置および車間距離制御装置を提供する。
【解決手段】 自車両と先行車両との車間距離情報を検出する車間距離検出手段100と、車間距離情報をフィルタ処理するフィルタ手段106とを備え、車間距離情報を処理して出力する車間距離情報の処理装置において、車間距離検出手段100が検出した車間距離情報の変化率又はフィルタ手段106によってフィルタ処理されたフィルタ後車間距離情報の変化率が所定値以上の時は検出した車間距離情報を出力し、車間距離検出手段100が検出した車間距離情報の変化率又はフィルタ手段106によってフィルタ処理されたフィルタ後車間距離情報の変化率が所定値未満のときはフィルタ後車間距離情報を出力する切替手段207を備えて構成する。
(もっと読む)
相対速度算出装置および車間距離制御装置
【課題】 相対速度算出値に含まれるノイズを抑制と、相対速度算出値をフィルタ処理する際に生じる応答遅れの低減とを両立させることができるようにした、相対速度算出装置および車間距離制御装置を提供する。
【解決手段】 自車両と該自車両の前方または後方を走行する他車両との車間距離情報を検出する車間距離検出手段100と、車間距離情報に基づいて予め設定された演算周期(例えば20ミリ秒)毎に自車両と他車両との相対速度情報を算出する相対速度算出手段108とを備えた車間距離制御装置において、相対速度算出手段108は、演算周期nにおいて入力された車間距離情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された車間距離情報とに基づいて、相対速度情報を算出する。
(もっと読む)
車両の加速度算出装置及び車両の走行制御装置
【課題】 加速度算出値に含まれるノイズを抑制できると同時に、フィルタ処理を行う際に応答遅れが大きくならないようにした、車両の加速度算出装置及びこれを用いた、車両の走行制御装置を提供する。
【解決手段】 車両の車速情報を検出する車速検出手段100と、該車速検出手段によって検出された該車速情報を時間微分することにより予め設定された演算周期毎に該車両の車速微分値を加速度情報として算出する車速微分値算出手段107とをそなえ、該車速微分値算出手段107は、演算周期nにおいて入力された該車速情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された該車速情報とに基づいて、該加速度情報を算出する。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
走行制御装置
【課題】先行車に追従する場合でも、自車両が必要以上に加減速しないようにできる。
【解決手段】走行制御装置は、自車両前方に先行車と先々行車とが存在しており(ステップS1、ステップS2)、その先行車が二輪車の場合において(ステップS3)、二輪車と先々行車との車間距離L1が距離L1d(Lmb)以下であり(ステップS8)、かつ自車両と二輪車との相対速度ΔVが相対速度ΔVd以上であり(ステップS9)、かつ道路幅方向において二輪車が先々行車の側面よりも外側にいるときには(ステップS10)、自車両と先々行車との車間距離である先々行車用車間距離L3が目標車間距離L*となるような走行制御にして、先々行車に追従するようにする。
(もっと読む)
1 - 6 / 6
[ Back to top ]