
Fターム[3D045AA00]の内容
ブレーキシステム(液圧制御弁) (1,262) | 用途 (92)
Fターム[3D045AA00]の下位に属するFターム
Fターム[3D045AA00]に分類される特許
1 - 9 / 9
車両の制動制御装置
【課題】 旋回挙動の安定性を確保しつつ、実用燃費の向上を図ることができる車両の制動制御装置を提供する。
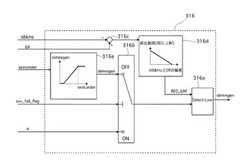
【解決手段】 ブレーキコントローラ5は、推定アンダーステア量sestunderが大きいほど小さな1次回生制限値slimregenを設定する1次回生制限値演算部316aと、ドライバ要求制動トルクsbknsと実回生制動トルクERとの偏差が大きいほど、2次回生制限値REG_LIMを大きく設定する2次回生制限値演算部316dと、1次回生制限値slimregenと2次回生制限値REG_LIMのセレクトローにより目標回生制動トルクの上限値である回生量制限値slimregenを選択するセレクトロー演算部316eと、を備える。
(もっと読む)
車両およびその制御方法

【課題】後進方向に走行している際の制動時に十分な制動力を得ると共に車両の安定性を確保する。
【解決手段】車両の後進制動時には、前進制動時の前後比よりも後輪の比率が大きくなる荷重に応じた前後比をもって前後輪に制動力が付与されるよう、運転者の踏力に基づいて発生されたマスタシリンダ101のマスタシリンダ圧Pmcをポンプ115,125により加圧して後輪のホイールシリンダ109c,109dの油圧として供給すると共に減圧ソレノイドバルブ113a,123bのオン/オフ制御により減圧して前輪用のホイールシリンダ109a,109bの油圧として供給する。これにより、後進制動時には進行方向として前方に位置する後輪により大きな制動力を付与して十分な制動力を得ると共に前輪がロックするのを抑制することができる。
(もっと読む)
車両およびその制御方法
【課題】前後輪の何れか一方に回生制動力を出力可能な電動機を備えた車両において、電動機による回生制動力を利用する際に前後輪に対する制動力のバランスをとる。
【解決手段】ハイブリッド自動車20では、ブレーキペダル85が踏み込まれたときにモータ50による回生制動力を用いる場合、CVT40を介したエンジン22(クランクシャフト23)の回転数制御およびオルタネータの制御(ステップS210またはS220)に基づく制動力である機関起因制動力が前輪65a,65bに出力されると共にモータ50による回生制動力が後輪65c,65dに出力されて要求制動力BF*が得られるようにモータ50とCVT40とオルタネータ28とHBS100のブレーキアクチュエータ102とが制御される。
(もっと読む)
自動車の制動力制御システム
【課題】前輪及び後輪それぞれにおいて効果的に制動を行うことができる自動車の制動力制御システムを提供する。
【解決手段】自動車1は、前輪2Ftを駆動する前輪電動機3Ftと後輪2Rrを駆動する後輪電動機3Rrとを互いに独立に制御可能な制御装置10を備える。制御装置10は、制動に伴う荷重移動量を考慮して目標制動力Fcar(目標制動トルクτB*)を前輪2Ft及び後輪2Rrに分配し(ステップS16、S6)、かつ、前輪2Ft及び後輪2Rrのスリップ率が所定の閾値以下に維持されるように前輪2Ft及び後輪2Rrに分配した目標制動トルクτBf*、τBr*を補正し(ステップS24、S7)、補正した目標制動トルクτBf*、τBr*が得られるように前輪電動機3Ft、後輪電動機3Rrをそれぞれ独立に制御して制動力を得る。
(もっと読む)
車両およびその制御方法並びに制動装置
【課題】制動時に電動機による制動力と機械ブレーキによる制動力との協調がスムーズに行なわれるようにしてトルクショックが生じないようにする。
【解決手段】制動時には、バッテリの入力制限WinとブレーキペダルポジションBPとに基づいて下限制限Tm2min,Tm3minを設定し(S190)、設定した下限制限Tm2min,Tm3minによってモータMG2,MG3から出力する回生トルクを制限する(S220)。これにより、車速が小さくなったときにモータMG2,MG3から出力する回生トルクの急変に対して油圧ブレーキの追従ができないことによる過剰な制動力の出力やトルクショックを抑制することができる。
(もっと読む)
身体状態判定システム及び運動状態判定システム並びにこれらシステムを備える移動台車
【課題】各種機能の稼動状態を切換え、使用者の意思に近い移動制御を可能とする移動台車を提供する。
【解決手段】移動台車は、身体状態判定システム20と、運動状態判定システム30とを具備しており、身体状態判定システム20の身体状態判定手段23により判定された使用者の身体状態と、運動状態判定システム30の運動状態判定手段34により判定された使用者の運動状態とに応じて、機能切替制御手段40が、移動制御手段42を制御するための各種機能の稼動状態を切替える。これにより、移動台車の移動制御を使用者の意思に近づけることが可能となる。
(もっと読む)
ハイブリッド車両のインテリジェントブレーキアシストシステム
【課題】 ブレーキアシスト作動を必要とする領域に入ったと判断されると、判断の直後から総制動力による車両減速を開始することで、ブレーキアシスト機能を最大限引き出して障害物への衝突を回避することができるハイブリッド車両のインテリジェントブレーキアシストシステムを提供すること。
【解決手段】 駆動源としてエンジン305とモータ303を有し、ドライバー操作によっても障害物への衝突が避けられないと判断されると自動的にブレーキをかけて減速するインテリジェントブレーキアシスト手段を備えたハイブリッド車両において、前記インテリジェントブレーキアシスト手段(図2)は、衝突可能性が判断されると、前記モータ303への駆動力配分比を、前記エンジン305への駆動力配分比より高めとする設定とし、ブレーキアシスト作動を必要とする領域に入ったと判断されると、前記モータ303により回生制動力を発生する手段とした。
(もっと読む)
車両の減速制御装置
【課題】 減速運転時に車両の積載重量に左右されない安定した減速特性を実現できるようにする。
【解決手段】 減速時燃料カット期間中に、要求減速度を実現するために、発電機の目標発電量GEを操作して減速度を制御する第1の減速制御と、目標スロットル開度THを操作して減速度を制御する第2の減速制御と、目標ブレーキ作動量BKを操作して減速度を制御する第3の減速制御とを組み合わせて実行する。その際、積載重量センサで検出した車両の積載重量に応じて減速制御パラメータ(目標発電量GE、目標スロットル開度TH、目標ブレーキ作動量BK)を補正することで、車両の乗車人数、積載荷物量、燃料量等の変化によって車両の積載重量が変化しても、それに応じて減速制御パラメータを補正して積載重量の変化による減速特性の変動を抑制する。
(もっと読む)
車両の回生制動制御装置
【課題】 直線走行を意図する操舵状態で、かつ、前後輪のうち一方のみに対する回生制動時、スプリットμ路制動であるにもかかわらず車両挙動の安定化を図ることができる車両の回生制動制御装置を提供すること。
【解決手段】 前後輪のうち一方の左右輪のみに発電機が連結され、減速要求操作に基づき前記発電機を作動させることで回生制動を行う回生制動制御手段を備えた車両において、前記回生制動制御手段は、直線走行を意図する操舵状態で、かつ、前後輪のうち一方のみに対する回生制動時、前記発電機が連結された左右輪と路面との間で回生制動力差が発生する状況を検知したら、回生制動量を制限する手段とした。
(もっと読む)
1 - 9 / 9
[ Back to top ]