
Fターム[3D046BB17]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711)
Fターム[3D046BB17]の下位に属するFターム
Fターム[3D046BB17]に分類される特許
1 - 20 / 311
車両の走行安全装置
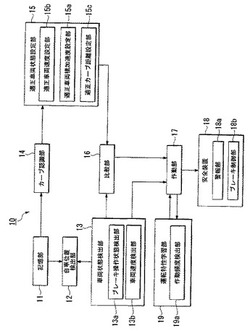
【課題】運転者の運転特性に応じて安全装置の作動し易さ、し難さを変更する。
【解決手段】道路データに基づき自車両の進行方向に存在するカーブ形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部15と、車両状態検出部13が検出した車両状態と適正車両状態設定部15が設定した適正車両状態とを比較する比較部16と、自車両の車両状態が適正車両状態にないときに自車両の安全装置18を作動させる作動部17と、カーブに対する作動部17の作動頻度を算出する作動頻度算出部19aと、作動部17の作動頻度に基づいて運転者の運転特性を学習する運転特性学習部19と、を備え、作動部17は学習した運転者の運転特性に基づいて安全装置18の作動内容を変更する。
(もっと読む)
踏み間違えるとアクセルペダルがブレーキペダルなる。

【課題】急な上り坂等も、走行可能である、停車時、又低速で、アクセルペダルを強く踏み込むと、エンジンが停止し、ブレーキが掛かる。
【解決手段】アクセルペダルが、B点通過後、低速になっても走行可能である、運転者がパニックを起こし、アクセルペダルを、ブレーキペダルと間違えて強く踏み込むと、エンジンを停止し、ブレーキを掛ける。
(もっと読む)
制動力制御装置及びブレーキペダル操作形態推定装置及びブレーキペダル装置
【課題】より適切な制動制御を実行させること
【解決手段】車輌の目標車輌制動制御値を算出する目標車輌制動制御値算出手段1aと、その目標車輌制動制御値に基づいて制御対象の車輪10FL,10FR,10RL,10RRの目標車輪制動制御値を算出する目標車輪制動制御値算出手段1bと、その目標車輪制動制御値を該当する車輪に対して発生させるよう制動装置(ブレーキアクチュエータ45)の駆動制御を行う制動装置制御手段1cと、ブレーキペダル20のペダル踏面上の押圧力を検知する押圧力検知手段(感圧素子23A1,23A2)と、その検知結果に基づいてペダル踏面の押圧分布を算出する押圧分布算出手段1fと、そのペダル踏面の押圧分布の変移に基づいてブレーキペダル20の操作形態を推定するペダル操作形態推定手段1dと、この推定された操作形態に応じて目標車輌制動制御値を補正する目標車輌制動制御値補正手段1eと、を備えること。
(もっと読む)
駐車支援装置
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
車両の横転防止装置
【課題】トラクタヘッド側でトレーラのロール角検出が正確に行える連結車両の横転防止装置を提供する。
【解決手段】トラクタのロール角を推定するトラクタロール角推定部(1)と、トラクタとトレーラの連結総重量を推定する連結総重量推定部(2)と、トラクタ及びトレーラを結合するカプラーが受ける荷重を推定する荷重推定部(3)と、該荷重と該連結総重量とトラクタロール角から、トレーラのロール角を推定演算するトレーラロール角推定部(4)と、を備える。
(もっと読む)
車両用走行支援装置及び車両用走行支援方法
【課題】本発明は、自車両の周辺車両に応じた適切な走行支援を行うことができる、車両用走行支援装置及び車両用走行支援方法の提供を目的とする。
【解決手段】自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されるときには、後続車両を減速させるため、自車両を制動制御する。自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されないときには、前方の障害物や対向車を回避する経路があって、側方又は後方の周辺車両に衝突するおそれがない場合には、自車両を操舵制御し、回避経路がなく又は周辺車両に衝突するおそれがある場合には、自車両を制動制御する。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンブレーキ(スロットル弁開閉アクチュエータ20)及び車輪ブレーキ(車輪ブレーキ作動手段21)の両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する場合に、ブレーキ作動開始初期に制御が不安定になるのを防止する。
【解決手段】エンジンブレーキ及び車輪ブレーキの両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する際に、エンジンブレーキを車輪ブレーキよりも所定時間だけ遅延させて作動開始させる。
(もっと読む)
自動車の運転におけるアクセルペタルの踏み間違いによる緊急自動停止装置。
【課題】従来、自動車の運転において、アクセルペタルとブレーキペタルの操作は、右足で別々に操作し通常の運転では問題ないが、突作の場合アクセルペタルをブレーキペタルと間違え、そのまま、急激に踏込んでしまう場合、事故になるケースがあり、その場合にのみ自動制動が働き、急停車するようにした。
【解決手段】アクセルペタルの動きを2個のセンサ、速度センサ3、近接センサ4で異常な動きをキャッチし、その信号により、モータを駆動し、自動制御でブレーキ操作するようにした。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
ブレーキ制御システム
【課題】液圧回路に配置される電磁弁の過熱状態を防止するとともに、制御の安定性も確保できるブレーキ制御システムを提供する。
【解決手段】DAC制御中にホイールシリンダへの増圧要求があると、ホイールシリンダ圧がEPB作動判定値P0(通電限界判定値)に達するまではECBによる増圧制御が行われ、その制動力が高められる。そして、ホイールシリンダ圧がEPB作動判定値P0に達すると、それ以降の制動力についてはEPBにより補われる。つまり、電磁弁への通電電流値が通電電流限界値を超えないように制御される。一方、減圧制御においてはもともと通電電流値が小さいため、ECBによる液圧制御が行われる。
(もっと読む)
パワートレーンの制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体
【課題】出力軸に伝達されるトルクが反転することにより生じるショックを低減する。
【解決手段】ECUは、MG(2)を用いた回生制動が不可能であると、MG(2)を用いた回生制動を制限するステップ(S120)と、エンジンにおいて燃料噴射を停止するフューエルカットを実行するステップ(S130)と、アップシフトを行なうと判断され(S140にてYES)、かつエンジンおよびMG(1)により出力軸に伝達されるトルクが車両を減速させるトルクであると(S150にてYES)、フューエルカットから復帰するようにエンジンを制御するステップ(S160)と、車両を減速させないトルクが出力軸に伝達されるように、エンジンおよびMG(1)を制御するステップ(S170)と、変速機がアップシフトを行なうように制御するステップ(S180)とを含む、プログラムを実行する。
(もっと読む)
車両制御装置
【課題】自動走行装置と自動制動装置とを備えた車両において、両装置の調和を図って車両の制御を適切に行うことを可能とする車両制御装置を提供する。
【解決手段】自動駐車装置と、車両後方に障害物を検出した場合に車両を自動制動する自動制動装置とを備える車両を制御する車両制御装置1である。この装置1では、車両後方に障害物を検出した場合(ステップS203)に、衝突までの余裕を示す衝突予測時間TTCを求め(ステップS205)、これが閾値以下である場合には、自動駐車装置の作動を中止する(ステップS206)。一方、衝突予測時間TTCが閾値よりも大きい場合は、自動駐車装置による走行出力を通常出力よりも低減させる(ステップS207)。このとき、障害物の種類に応じて、走行出力の低減のさせ方を変更する。
(もっと読む)
車両の制御装置
【課題】車両周辺を撮像する撮像手段と、該撮像手段により撮像された画像データに対して所定の画像処理を行う画像処理手段とを備え、該画像処理手段における画像処理に基づいて作動する制御システムの作動制御を行う車両の制御装置において、画像処理手段の処理負担を増加させることなく、複数の制御システムの作動を効率よく制御する。
【解決手段】上記制御システムを低速時に作動する低速度領域性制御システムと高速時に作動する高速度領域制御システムとで構成するとともに、低速時(ステップSA1でNOのとき)には、低速度領域制御システムを作動させるとともに、上記画像処理手段による高速度領域制御システムのための画像処理を停止する一方、高速時(ステップSA1でYESの場合)には、高速度領域制御システムを作動させるとともに、上記画像処理手段による低速度領域制御システムのための画像処理を停止するようにする。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
電磁誘導式自動走行車の停止制御方式
【課題】 停止エリア外では高速での走行が可能であり、停止エリア内では、停止位置の精度に優れた電磁誘導式自動走行車の停止制御方式を提供する。
【解決手段】 電磁誘導式自動走行車が停止エリアに入ったことが検出された場合には、駆動モータ4の回生制動と、ドラムブレーキ10a〜dとを用いて減速し、その後に停止信号が検出された場合には、あらかじめ設定されている走行距離を走行した後に、電磁クラッチブレーキ15を用いて停止をする。そして、あらかじめ設定されている走行距離と、実際の走行距離とを比較し、その差が設定範囲を超えているような場合には、前記電磁クラッチブレーキを解除し、前進又は後退の微調整走行をした後に、再び前記電磁クラッチブレーキを用いて停止をする。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者が速度順応現象に陥ったときに車両の安全を確保する。
【解決手段】走行情報取得部22は、車両走行情報を取得して蓄積する。判定部24は、車両走行情報の履歴に基づいて、高速走行により車両の運転者の速度感覚に影響を及ぼしうる時間として予め定められた所定時間にわたり高速走行が継続している速度順応条件が成立するか否かを判定する。制御量変更部26は、判定部24により速度順応条件が成立すると判定されたとき、運転者によるブレーキ操作量にしたがって設定される目標減速度を通常走行時より増加させる。ブレーキ制御部28は、目標減速度を参照して車両に制動力を発生させる。
(もっと読む)
車両の操作装置
【課題】 運転者によって独立的に操作される操作部の操作状態変化に起因する意図しない車両の挙動変化を抑制する操作装置を提供すること。
【解決手段】 操作意思推定部41は、回転操作部13,14の検出回転角θL,θRの時間変化量に基づき、操作部13,14の操作が意思操作領域または片方操作領域のいずれであるかを判定する。重み係数決定部42は、操作部13,14の操作が意思操作領域であれば重み係数KL,KRを所定の設定値に設定する。また、決定部42は、片方操作領域であれば中立位置まで復帰した側の操作部13(操作部14)の係数KL(係数KR)を小さな値に決定し、他側の操作部14(操作部13)の係数KR(係数KL)を大きな値に決定する。指令値演算部43は、回転角θL,θRおよび係数KL,KRを用いて指令値(要求値)Sを計算する。これにより、運転者の意図しない車速の変化を抑制できる。
(もっと読む)
車両用運転支援システム
【課題】 同乗者の乗り心地を向上させる。
【解決手段】 車両の加速度が加速度判定値未満になるようにスロットルバルブの開度及び制動装置等を制御する。これにより、車両が発信した際に車両の乗員に対して必要以上の慣性力が作用しないので、同乗者の乗り心地を向上させることができる。
(もっと読む)
運転支援装置
【課題】過去の運転者の車両操作と対応付けて記憶された車両状況から今後の運転者が行う車両操作を予測することにより、現在の状況に応じた適切な走行を行わせることを可能とした運転支援装置を提供する。
【解決手段】自車両の前方を走行する前方車両が検出された場合に、学習システムを起動させて自車状況と自車両の周囲状況を前方レーダ装置3や各種センサ等によって検出し(S5、S6)、運転者の車両操作と対応付けて累積的に学習情報DB8に記憶させる(S8)とともに、一方で、その学習結果と現在の車両状況とから運転者が今後に車線変更の運転操作を行うか否かを予測し(S14)、車線変更の運転操作を行うと予測された場合にはレーンキープアシスト制御やクルーズコントロール制御等の車線変更を妨げる制御を抑制する(S16)ように構成する。
(もっと読む)
1 - 20 / 311
[ Back to top ]