
Fターム[3D046GG09]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | 懸架装置(サスペンション) (64)
Fターム[3D046GG09]に分類される特許
1 - 20 / 64
ばね下制振装置
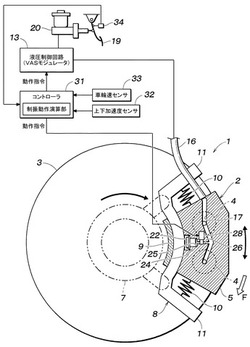
【課題】車輪を制動するディスクブレーキ装置を構成するブレーキキャリパを動吸振器の質量体として用いてばね下の制振を行う場合に、広範な周波数域のばね下振動を低減することができるようにする。
【解決手段】ブレーキキャリパ2に設けられた摩擦パッド4をブレーキロータ3に対して圧接動作させる液圧を発生する液圧制御回路13を制御するコントローラ31を備え、このコントローラが、車輪の制動を要しない通常走行時に、摩擦パッドをブレーキロータに圧接させるように液圧制御回路を制御して、動吸振器の質量体としてのブレーキキャリパに、ブレーキロータと摩擦パッドとの間の摩擦力を作用させるようにする。
(もっと読む)
車両のヨーモーメント制御装置

【課題】 車両の運動状態を制御する主操作部材に設けた副操作部材の操作でヨーモーメント発生装置の作動を制御するものにおいて、副操作部材が出力する指令信号のノイズの影響を低減する。
【解決手段】 運転者がステアリングホイール7に設けたグリップ9L,9Rを操作すると、そのグリップ9L,9Rの操作に応じてヨーモーメント発生装置が車両のヨーモーメントを変化させるので、ステアリングホイール7を操作して車両の運動状態を制御するのと同時並行して、車両の旋回を補助あるいは抑制することができる。このとき車速の増加に応じてグリップ9L,9Rの操作量に対するヨーモーメントの変化量を変更するので、運転者によるステアリングホイール7の保持力や操作力が増加するためにグリップ9L,9Rの操作にノイズが乗り易くなっても、そのノイズの影響を最小限に抑えてヨーモーメント発生装置が不適切なヨーモーメントを発生するのを防止することができる。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ブレーキ7(FL,FR,RL,RR)の作動中に車輪6(FL,FR,RL,RR)がロック傾向になったときに制動力を減少させるアンチロックブレーキ制御を実行する装置20において、ブレーキング中に車輪6がジャンプしてから着地するときに、駆動系にかかる負荷を軽減可能とする。
【解決手段】ブレーキング中において車輪6が走行路面からジャンプすることによって、アンチロックブレーキ制御の実行条件が成立したときに、当該アンチロックブレーキ制御における制動力減少動作を抑制させる。これにより、ジャンプしていた車輪6が着地したときの制動力が従来例のように減少されずに済むので、着地時に車輪6に作用する負荷が車輪6およびブレーキ7で吸収されることになって、駆動系にかかる負荷が軽減される。
(もっと読む)
車両制御装置
【課題】車高の調整時に車両の各部にかかる負担を軽減する。
【解決手段】車高調整手段は、車両のばね上とばね下の間に車輪毎に介装され車体と車輪の間の距離を変えることで車高を調整する。ブレーキ設定部118は、車高調整手段による車高調整の実行中に車輪の回転を許すように制動手段によって発生する制動力を低下させる。ブレーキ設定部118は、傾斜測定部112により測定された路面の傾斜の大きさに応じて異なる制動力を設定する。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動の発生を精度良く検出し適切にロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置1は、車両の横力を、スリップ角及び接地荷重の少なくとも一方を変数とした非線形の関数として演算し、その演算した横力と、少なくとも車両のロール角、ヨー角、上下変位と、に基づいて車両におけるロール振動の発生の有無を判断すると共に、その判断の結果ロール振動が発生すると判断された場合、ロール振動を抑制する。
(もっと読む)
車輪位置特定装置
【課題】車輪位置特定装置において、車体側の車輪速センサからの検出結果を使用することなく、車輪側の回転状態センサからの検出結果のみを使用して車輪の車輪位置を短時間かつ確実に特定する。
【解決手段】車輪位置特定装置は、各ホイールシリンダのうち少なくとも一つに油圧変動を発生させ(ステップ406)、各車輪にそれぞれ設けられた回転状態センサから取得した車輪の各回転状態に基づいて油圧変動に対する応答の有無をそれぞれ取得し(ステップ408)、各ホイールシリンダへの油圧変動の有無と取得した応答の有無の組み合わせから各車輪と各ホイールシリンダとを関連付ける(ステップ410)。
(もっと読む)
旋回制御装置、自動車及び旋回制御方法
【課題】 車両の旋回時の挙動を安定化すること。
【解決手段】 車両の旋回状態量に基づいて旋回外側の車輪の制動力を大きくし、また、旋回外側の車輪の制動力が大きくなると、車両の旋回状態量に基づいて後輪のロール剛性配分の比率を大きくするようにした。そのため、旋回外側の車輪、つまり、旋回中の遠心力によって大きな輪荷重を受けている車輪の制動力のみを大きくするので、旋回内側の後輪の制動力を大きくする場合と異なり、車輪がロックすることを防止できる。また、その際、旋回外側の車輪の制動力が大きくなることで、車両前部を旋回外側方向に向ける方向のヨーモーメントが車両に付与され、アンダーステア傾向が強くなるが、後輪のロール剛性配分比率を大きくすることで、オーバーステア傾向を強めて、アンダーステア傾向を打ち消すことができ、車両の旋回時の挙動を安定化することができる。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを自車両の現在位置の検出誤差等を考慮して適切な制御タイミングで作動させること。
【解決手段】サスペンションECUはステップS52にて自車両の検出現在位置と地図上の現在位置との一致精度を表す信頼度Sを計算する。ステップS54においては、信頼度Sと、ナビイベント開始地点と実際に路面凹凸部分が存在する地点まで距離Lsとの相関係数Rを計算する。そして、ステップS56にて相関係数Rが所定値R0以上であれば、ステップS57にて相関性を表す回帰直線Mを計算する。このように回帰直線Mを計算すると、次回以降同一のナビイベント開始地点を走行する際には、ステップS59において、信頼度Sと回帰直線Mとを用いて適切な延長距離L5を計算する。したがって、事前作動制御が適切に延長され、アクチュエータを適切な制御タイミングで作動させることができる。
(もっと読む)
操舵制御装置、操舵制御システムおよび操舵制御プログラム
【課題】転舵専用アクチュエータ不要とすることによって操舵輪関連の設計上の自由度を向上させた、SBW技術使用の操舵制御装置を提供する。
【解決手段】操舵制御装置は、ステアバイワイヤ式の車両CRの操舵を制御する装置であり、左右の操舵輪TL,TRに独立してトルクを付与する操舵輪用モータML,MRと、左右の操舵輪TL,TRを転舵可能に連結するロッド部16と、操舵輪用モータML,MRを駆動制御する操舵制御部20Aと、を備え、操舵輪TL,TRの接地中心とキングピン位置とが車両CRの幅方向にオフセットしており、操舵制御部20Aは、左右の操舵輪TL,TRにトルク差を生じさせるように操舵輪用モータML,MRを駆動制御し、トルク差に応じた転舵力をロッド部16を介して左右の操舵輪TL,TRに伝達させることによって、車両CRを転舵させる。
(もっと読む)
車両の想定視線角度制御装置
【課題】 車両の減速時にドライバに自然な減速感を与えることができる車両の想定視線角度制御装置を提供する。
【解決手段】 サスペンション制御量設定部12は、制動状態演算部11から出力される減速度Gに基づいて、目標ピッチ角Apを求める。このとき、車両M1の車速に応じて、減速度を補正し、車速が大きいほど目標ピッチ角Apが後傾側となるようにする。また、目標ピッチ角Apを補正するとともに、ブレーキペダルの操作量に対する減速度Gも補正する。減速度Gの補正では、車速が大きいほど、ブレーキペダルの操作量に対する減速度Gが大きくなるようにする。
(もっと読む)
車両の直進制動時の運転制御装置及び運転制御方法
【課題】車両の構造に内在する左右の非対称性に起因して車両の制動時に生ずる車両の偏向を是正する新規な車両の運動制御装置及び運動制御方法を提供すること。
【解決手段】本発明の車両の運動制御装置は、車体の減速度を取得する手段と、減速度に基づいて、制動装置、前後輪の操舵装置等の車体偏向手段の作動を制御して、車両の構造に於ける左右の非対称性に起因して車両の直進制動時に車体に発生する横力又はヨーモーメントを低減する横力又はヨーモーメントを発生させる偏向制御手段とを含む。
(もっと読む)
路面摩擦状態推定方法、路面摩擦状態推定装置、及び、路面摩擦状態推定用タイヤ
【課題】タイヤと路面との間の摩擦状態を精度良く推定する方法とその装置、及び、路面摩擦状態の推定に用いられる路面摩擦状態推定用タイヤを提供する。
【解決手段】タイヤトレッドの幅方向中心に位置する陸部内に埋設した垂直応力検出手段11a及び剪断応力検出手段11bとにより、上記陸部のトレッドゴムに作用する垂直応力σzとタイヤ周方向の剪断応力τxとを検出した後、応力比算出手段12にて応力比rx=(τx/σz)を算出し、この応力比rxと上記垂直応力σzのデータとを車体側の路面摩擦状態推定装置20に送信し、接地中心位置から路面蹴出し点の間の領域の最大値rbを抽出し、上記抽出された最大値rbと上記記憶手段24に記憶されたr−μマップ24Mとに基づいて、路面とタイヤとの間の路面摩擦係数μを推定するようにした。
(もっと読む)
車両挙動制御装置
【課題】簡易な制御でロール振動の発生を効果的に抑制できる車両挙動制御装置を提供する。
【解決手段】車両挙動制御装置1では、車両のロール角、ヨー角、横力、上下変位に基づいて車両におけるロール振動の発生の有無を判断し、ロール振動の発生を検出した場合、内輪の横力Finよりも外輪の横力Foutを減少させる。これにより、車両と路面との横方向μが低下し、車両の横滑りが生じるため、ロール振動時に車両の外輪側で発生する上下方向の運動エネルギーを、車両が旋回外側にシフトする方向の運動エネルギーに変換することが可能となり、ロール振動が効果的に抑制される。また、横力の制御にあたり、普及率の高まっているVSC制御部10による各車輪のブレーキ圧制御を用いることで、高い応答性を確保しつつ、制御手段の複雑化を回避できる。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】車両が路面の凸部を通過する際の衝撃を和らげることができる車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】車両の前方路面にある凸部の形状を検出する凸部検出手段と、前記凸部の形状に基づいて加速度を設定する減速加速度設定手段と、前記凸部から第一の距離手前の地点を第一地点、前記第一地点から第二の距離手前の地点を第二地点として設定する地点設定手段と、前記第二地点から前記第一地点の間において前記車両を前記加速度で減速させ、前記第一地点に到達すると前記車両の減速を解除する速度制御手段と、を備える車両走行制御装置。
(もっと読む)
サスペンション制御装置
【課題】アクチュエータのストロークを保持しながら輪荷重を増加させることで急制動時の制動性能向上を長時間にわたって確保できるサスペンション制御装置を提供する。
【解決手段】車両2の制動状態が急制動である場合、制動制御信号27と通常制御信号26とを加算して得た補正通常制御信号28を油圧シリンダ13に出力し推力を発生させる。制動制御信号27が含まれる補正通常制御信号28に基づく油圧シリンダ13の伸縮制御により、推力の発生時には輪荷重が増減される。油圧シリンダ13の伸び制御により輪荷重が増加され、制動性能が向上し制動距離が短縮される。油圧シリンダ13の縮み制御により、油圧シリンダ13の伸びきりが抑制され、その分、ストロークが確保され、ひいては長時間にわたり制動性能を向上できる。
(もっと読む)
車両用センサ付き転がり軸受装置
【課題】 自動車のブレーキ操作時に、最大制動力を利用した制御を可能とする車両用センサ付き転がり軸受装置を提供する。
【解決手段】 センサ装置2は、超音波センサと、超音波センサの出力に基づいてタイヤ接地荷重の前後方向成分を求める前後荷重演算手段32と、タイヤ接地荷重の前後方向成分に基づいて車輪に与えるべきブレーキ力を演算するブレーキ力演算手段34とを備えている。ブレーキ力演算手段34は、タイヤ接地荷重の前後方向成分の変化量を求める前後力変化量演算部35と、タイヤ接地荷重の前後方向成分の変化量に所定係数をかけることによりブレーキ力制御のための信号を作成する信号作成部36とを有している。
(もっと読む)
路面状態推定装置及び方法
【課題】精度よく路面の状態を推定することができる路面状態推定装置及び方法を提供する。
【解決手段】路面状態推定装置は、路面に接触する回転体の各種物理量を計測する計測段11と、計測段11で計測したデータから回転体の回転に同期した信号を抽出する適応デジタルフィルタを有し、計測段11で計測したデータと適応デジタルフィルタで抽出した回転に同期した信号とから、抽出した残りの信号を求める抽出段21と、抽出段21で抽出した残りの信号により路面の状態を推定する推定段41とを具える。
(もっと読む)
車両の電子制御システムおよびその制御方法
【課題】メインコントローラと少なくとも一つのローカルコントローラとの間に通信を行うと共に、相互間の情報を考慮して、制動装置および懸架装置を制御することにより、各コントローラの固有特性をさらに改善し、かつ、活性化させることができるのみならず、システムも単純化させることができる車両の電子制御システムおよびその制御方法を提供すること。
【解決手段】車両の情報を受信し、車両の制動制御信号および懸架制御信号を生成して出力するメインコントローラと、メインコントローラにより出力された懸架制御信号に応じて、各車輪のダンパを制御する少なくとも一つのローカルコントローラと、メインコントローラとローカルコントローラとの間のデータ通信を行うインターフェース部と、を備える。
(もっと読む)
1 - 20 / 64
[ Back to top ]