
Fターム[3D046HH00]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844)
Fターム[3D046HH00]の下位に属するFターム
ブレーキ初動装置 (1,136)
アクセルペダル操作 (607)
クラッチ操作 (29)
変速機 (289)
操舵状態 (651)
電源状態 (153)
温度 (112)
圧力 (728)
エンジン状態 (242)
燃料供給状態 (68)
乗員、乗降状態 (51)
車外障害物 (520)
車体状態 (2,543)
車輪状態 (1,034)
路面状態 (350)
制動状態 (97)
懸架装置(サスペンション) (30)
アクチュエータ、弁の作動状態 (19)
天候 (20)
Fターム[3D046HH00]に分類される特許
1 - 20 / 165
車両の走行安全装置
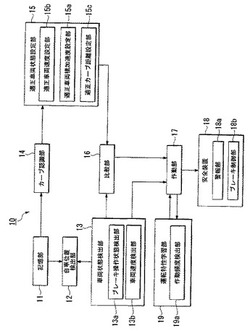
【課題】運転者の運転特性に応じて安全装置の作動し易さ、し難さを変更する。
【解決手段】道路データに基づき自車両の進行方向に存在するカーブ形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部15と、車両状態検出部13が検出した車両状態と適正車両状態設定部15が設定した適正車両状態とを比較する比較部16と、自車両の車両状態が適正車両状態にないときに自車両の安全装置18を作動させる作動部17と、カーブに対する作動部17の作動頻度を算出する作動頻度算出部19aと、作動部17の作動頻度に基づいて運転者の運転特性を学習する運転特性学習部19と、を備え、作動部17は学習した運転者の運転特性に基づいて安全装置18の作動内容を変更する。
(もっと読む)
電動車両の停止制御方法

【課題】廉価なホールICを用いて、しかも、誤差成分の影響を最小にして高精度に電動車両の停止制御を行うようにする。
【解決手段】電動車両100は、操作レバー82と、車軸102と、操作レバー82からの操作指示に基づいて回転制御されるモータ10と、モータ10の回転力を車軸に伝達する伝達機構106と、モータ10の回転を制動するための電磁ブレーキ108と、モータ10の回転に伴って生成される一連のパルス信号に基づいてモータ10の回転速度を検出する速度検出回路50を有する。そして、操作レバー82からの操作指示がモータ10の回転停止を示し、且つ、モータ10の回転が電子制御ユニット104によって減速制御される時点から、速度検出回路50からのパルス信号の2回の立ち下がりを経過した時点を、モータ10の回転を電磁ブレーキ108によって停止させる契機の基準時点とする。
(もっと読む)
踏み間違えるとアクセルペダルがブレーキペダルなる。
【課題】急な上り坂等も、走行可能である、停車時、又低速で、アクセルペダルを強く踏み込むと、エンジンが停止し、ブレーキが掛かる。
【解決手段】アクセルペダルが、B点通過後、低速になっても走行可能である、運転者がパニックを起こし、アクセルペダルを、ブレーキペダルと間違えて強く踏み込むと、エンジンを停止し、ブレーキを掛ける。
(もっと読む)
車両用衝突予防安全装置、衝突予防安全システム、及び衝突予防安全情報センター
【課題】適切な頻度で衝突回避のための動作を行なうと共に処理負荷を軽減することが可能な車両用衝突予防安全装置等を提供すること。
【解決手段】自車両の進行方向に存在する交差点に自車両の進行方向と交差する方向で接近する所定接近車両を検知する所定接近車両検知手段(30)と、所定接近車両検知手段により検知された所定接近車両について、衝突危険性に関する所定の判定を行なう判定手段(66)と、を備え、判定手段の判定結果に基づいて、衝突回避のための所定動作を行なう車両用衝突予防安全装置(11)であって、所定接近車両検知手段により所定数以上の所定接近車両が検出された場合には、衝突回避のための所定動作を行なわないことを特徴とする。
(もっと読む)
ブレーキ装置
【課題】 電動制動力発生手段を駆動する電動モータを大型化することなく、制動力発生の応答性を高める。
【解決手段】 目標ブレーキ液圧算出手段M1はスレーブシリンダに発生させるべき目標ブレーキ液圧を算出し、微分手段M2は目標ブレーキ液圧を時間微分して目標ブレーキ液圧の変化率を算出し、界磁電流算出手段M3は目標ブレーキ液圧の変化率に基づいてスレーブシリンダを駆動する電動モータの界磁電流指令値を算出し、電動モータ制御手段M4は界磁電流指令値に基づいて電動モータを弱め界磁制御する。目標ブレーキ液圧の変化率が大きいときは制動力を急激に立ち上げる必要がある緊急時であり、このときに界磁電流指令値を増加させて電動モータの弱め界磁量を増加させることで、電動モータの回転数を増加させてスレーブシリンダを速やかに作動させ、制動力発生の応答性を高めることができる。
(もっと読む)
液圧ブレーキ装置およびその制御方法
【課題】液圧ブレーキ装置において、液漏れ等の失陥発生時にリザーバタンクからの空気吸い込みを防止しつつブレーキの制御可能時間を延長する。
【解決手段】液面スイッチ80は、リザーバタンクの予め定められた下限液面へのブレーキ液面の低下を検知する。タイマ部108は、リザーバタンク内の液面の傾斜によって液面スイッチがブレーキ液面の低下を検知する第1時刻から、車両が加減速しておらずブレーキ液面が水平であるときに液面スイッチがブレーキ液面の低下を検知する第2時刻までの経過時間を計測する。液漏れ推定部103は、第1時刻の加速度を参照して液面高さマップ保持部102から対応する液面高さを取得し、経過時間と液面高さからブレーキ液面低下速度を算出する。猶予時間算出部110は、ブレーキ液面低下速度に基づいて液圧ブレーキ装置の制御を停止するまでの猶予時間を計算する。
(もっと読む)
電動車両
【課題】電動車両の降坂走行時において、降坂走行に引き続く平坦路走行あるいは登坂走行で十分な動力性能が発揮できるように考慮した電動発電機の回生発電制御を行なう。
【解決手段】回生制御部110は、回生制動時のモータジェネレータのトルク指令値Tqcom(一般的には負値)を設定する。制動協調制御部150は、運転者のブレーキ踏力BKに基づき車両全体で必要とされるトータル制動力(パワー)を算出するとともに、このトータル制動力の出力についての油圧ブレーキ90およびモータジェネレータ間での分担を制御する。MG−ECU50は、トルク指令値Tqcomに従った回生トルクが発生されるようにモータジェネレータを駆動制御する。回生制御部110は、同一のブレーキ操作に対して、降坂路走行時には平坦路走行時よりも回生トルクの絶対値が小さくなるように制限する。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】外部の状況を鑑みて不要な情報提供や動作制御を抑制・禁止する周辺監視装置および周辺監視方法を提供すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者認識部18が歩行者を認識するとともに、特定環境検知部19が信号前停止、横断歩道前停止、歩道状態、道路種別、走行車線など歩行者を認識してもその歩行者との衝突が発生する可能性が低く、情報提供や車両制御の必要性が小さい特定の状況を検知する。そして特定の状況を検知した場合には、運転者に対する報知や車両動作の制御を禁止・抑制する。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】電動パーキングブレーキの構成要素の耐久性を高める必要を廃することができる電動パーキングブレーキ制御装置を提供すること。
【解決手段】本発明による電動パーキングブレーキ制御装置1は、車両のドラムブレーキ7の作動力を制御する作動力制御手段2aと、ドラムブレーキ7の制動力不足を検出する制動力不足検出手段2bと、制動力不足検出手段2bが制動力不足を検出した場合に、制動力不足検出手段2bが制動力不足を検出しなくなるまで作動力を増加させる作動力増加手段2cと、車両の位置を検出する位置検出手段9aと、作動力増加手段2cが作動力を増加させた場合に、作動力の増加分と位置検出手段9aの検出した車両の位置を記憶する記憶手段9bを備えると共に、記憶された車両の位置において再度車両を停止させる場合に、作動力増加手段2cが記憶された作動力の増加分だけ一度に作動力を増加させることを特徴とする。
(もっと読む)
電動ディスクブレーキ装置
【課題】錆を早期に除去することで、ディスクに生じる肉厚変動を抑制でき、ジャダーの発生を抑制できる電動ディスクブレーキ装置の提供。
【解決手段】車輪とともに回転するディスク11にブレーキパッド14,15を押圧する推力機構13,40と推力機構13,40を駆動する電動モータ19とを内包する電動キャリパ10と、電動モータ19をブレーキペダルの操作に基づいて制御する制御手段とを有し、制御手段は、車輪の回転中にブレーキペダルの操作に関係なく電動モータ19により推力機構13,40を介してディスク11にブレーキパッド14,15を接触させて錆を落とす錆落とし制御を行う。
(もっと読む)
ブレーキ制御方法およびブレーキ制御装置
【課題】車両の制動性能を向上させ、制動距離を短くすることができるブレーキ制御方法およびブレーキ制御装置を提供する。
【解決手段】本発明のブレーキ制御装置は、タイヤが装着された車輪に制動力を付加して制動させるとともに、制動力を調整する機能を有するブレーキと、タイヤにかかるその半径方向の加速度信号を時系列的に検出する加速度センサと、加速度信号からタイヤの接地長を逐次算出する接地長算出部と、ブレーキによる制動力が付加されたことを検知し、検知信号を出力するブレーキセンサと、ブレーキセンサから検知信号が入力された場合、各時刻で得られたタイヤの接地長を比較して得られた比較情報に基づいて、ブレーキに制動力の調整の要不用を示す制動情報信号を出力する判定部と、判定部からの制御情報信号に基づいてブレーキに制動力を調整させる制御信号を出力するブレーキコントロールユニットとを有する。
(もっと読む)
走行支援装置
【課題】必要な状況にのみ走行支援を行い、運転者が違和感を覚えることなく自車両の衝突を防止することのできる走行支援装置を提供する。
【解決手段】自車両が交差点に向かって非優先道路を走行していると判断されると共に、自車両の斜め前方に存在する他車両が検出されると、自車両と他車両とが、衝突する可能性があるか否かが判定され、その結果に応じて回避支援部が作動される。この時、自車両が交差点に向かって非優先道路を走行していると判断されていると、優先道路を走行している場合に比べて、衝突する可能性があると判定し易くする。従って、自車両が非優先道路を走行している場合には、適切な走行支援を行い、優先道路の場合には走行支援を行いにくくする。
(もっと読む)
電磁誘導式自動走行車の停止制御方式
【課題】 停止エリア外では高速での走行が可能であり、停止エリア内では、停止位置の精度に優れた電磁誘導式自動走行車の停止制御方式を提供する。
【解決手段】 電磁誘導式自動走行車が停止エリアに入ったことが検出された場合には、駆動モータ4の回生制動と、ドラムブレーキ10a〜dとを用いて減速し、その後に停止信号が検出された場合には、あらかじめ設定されている走行距離を走行した後に、電磁クラッチブレーキ15を用いて停止をする。そして、あらかじめ設定されている走行距離と、実際の走行距離とを比較し、その差が設定範囲を超えているような場合には、前記電磁クラッチブレーキを解除し、前進又は後退の微調整走行をした後に、再び前記電磁クラッチブレーキを用いて停止をする。
(もっと読む)
ブレーキ制御装置およびディスプレイ制御装置
【課題】車両に設けられたディスプレイの使い勝手をよくすることである。具体的には、車両の停止状態において、テレビスイッチがON状態にある場合には、運転者がパーキングスイッチを操作しなくても、テレビ映像が表示されるようにすることである。
【解決手段】車両の走行速度が停止状態にあるとみなし得る設定速度以下であり、テレビスイッチがON状態にある場合には(S11,12の判定がYES)、パーキングスイッチが操作されていなくても、パーキングブレーキが作動させられ(S13〜16)、パーキングスイッチがON状態にあることを表す情報がディスプレイを制御するコンピュータに出力される(S17)。その結果、車両が停止状態にあり、かつ、テレビスイッチがON状態にある場合には、運転者がパーキングスイッチを操作しなくても、テレビ映像を見ることが可能となる。
(もっと読む)
自動制動制御装置
【課題】制動が開始されるタイミングをユーザが認識することができる自動制動制御装置を提供する。
【解決手段】車両の位置21が自動制動開始位置32より500mの位置になると、自動制動開始位置の拡大地図30aが分割画面として表示される。拡大地図30aには、自車位置マーク21とともに自動制動開始位置までの距離を示したインジケータ31aと、自動制動開始位置を示す自動制動開始位置マーク32とが表示される。インジケータ31aでは、車両の位置と自動制動開始位置との間の距離がバーの長さで表示され、自動制動開始位置に近づくにしたがってバーの長さは短くなる。車両の位置が自動制動開始位置より20mの位置になると、拡大地図30aに比べて縮尺率の大きい自動制動開始位置の拡大地図30bが分割画面として表示される。拡大地図30bには、拡大地図30aと同様に、自車位置マーク21とともにインジケータ31bと自動制動開始位置マーク32とが表示される。
(もっと読む)
プリクラッシュシステム
【課題】本発明は、想定される衝撃に対して効果的に備えることができるプリクラッシュシステムを提供する。
【解決手段】プリクラッシュシステム10は、自動車20に衝撃が入力される可能性がある状況のとき運転者Hが行う耐ショック姿勢に起因して自動車に作用する荷重を検出する耐ショック姿勢検出用センサ11〜14と、耐ショック姿勢検出用センサ11〜14によって検出された検出値に基づいて運転者Hが耐ショック姿勢であるか否かの判断をするとともに、乗員が耐ショック姿勢であると判断すると自動車20に搭載された安全装置24,25を作動させるコントローラ15と、を備える。
(もっと読む)
電動パーキングブレーキシステム
【課題】張力センサによって検出された張力を利用できない異常が検出された場合であっても、パーキングブレーキを解除可能とする。
【解決手段】電動パーキングブレーキシステムにおいて、異常が検出された場合であっても、電動モータの作動が可能である場合には、ブレーキ解除要求に応じてブレーキの解除制御が行われる(S6〜8)。その場合に、張力センサの正常時には、張力センサの検出値を使用して、正常時と同様にブレーキ解除制御が行われ(S7)、張力センサの異常時には、モータに流れる実際の電流に基づいてブレーキ解除制御が行われる(S8)。張力センサの異常時にもブレーキを解除することが可能となり、運転者は、速やかに車を移動させることが可能となる。
(もっと読む)
電動パーキングブレーキシステム
【課題】シフト変化に応じてパーキングブレーキが解除される電動パーキングブレーキシステムにおいて、イニシャルチェック終了前にシフト操作が行われても、パーキングブレーキを解除可能とする。
【解決手段】第1位置(パーキング位置)については、イニシャルチェック終了前(時点T7)において、暫定的に確認されるとともに本確認され、第2位置について、イニシャルチェック終了前(時点T8)に暫定的に確認されても、イニシャルチェック終了後(時点T4)に、本確認されて、第1位置から第2位置への変化が確認される。その結果、その変化の確認に応じてリリース指令が出力されれば、電動モータを作動させて、パーキングブレーキを解除することが可能となる。
(もっと読む)
電動パーキングブレーキシステム
【課題】センサの温度および温度特性を考慮して、張力を車両を停止状態に保ち得る適正な大きさに制御し、消費電力の低減を図る。
【解決手段】前後加速度センサは、温度が標準温度Tαより高い場合は低い場合より、誤差の絶対値が小さくなる特性を有する。温度特性が考慮されない場合には、温度が高くても低くても、誤差の絶対値が最大値dであると想定して、前後加速度が求められ、傾斜角度が取得されるようにされていた。それに対して、温度および温度特性が考慮されれば、温度が標準温度Tαより高い場合には、誤差の絶対値がc(c<d)であると取得することができる。その結果、前後加速度センサによる検出値に基づいて、真の値に近い傾斜角度を取得することができる。目標値を、車両を停止状態に保ち得る適正な大きさで、かつ、より小さい値として取得することができ、消費電力の低減を図ることができる。
(もっと読む)
ブレーキ異常検出システム、ブレーキ温度検出システム、およびブレーキ制御システム
【課題】簡易な構成によってブレーキ装置の温度等を検出し、車両の乗員への報知やブレーキ制御等に役立てる。
【解決手段】ブレーキ異常検出システム200Aにおいて、グリース量判定部102は、検出された電気抵抗値を利用してグリースの量が充分か否かを判定する。表示制御部106およびディスプレイ50は、グリースの量が充分でないと判定された場合、車両の乗員にその旨を報知する。車輪速センサ54は、車両の停車を検出する。電気抵抗検出装置48は、車両のブレーキに設けられるブレーキパッドのパッド裏金30と、パッド裏金30とグリースを介して近接して設けられるパッドシム18との間の電気抵抗を検出する。グリース量判定部102は、所定時間を越える車両の停車が検出された場合に、検出された電気抵抗値を利用してグリースの量が充分か否かを判定する。
(もっと読む)
1 - 20 / 165
[ Back to top ]