
Fターム[3D046HH21]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543)
Fターム[3D046HH21]の下位に属するFターム
Fターム[3D046HH21]に分類される特許
1 - 20 / 384
車両のヨーモーメント制御装置
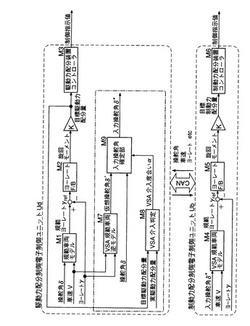
【課題】 制動力配分制御電子制御ユニットに大幅な改修を施すことなく、駆動力配分制御電子制御ユニットとの協調制御を可能にして車両のヨーモーメント制御装置のコストダウンを図る。
【解決手段】 駆動力配分制御電子制御ユニットUdのVSA規範車両逆モデルM7が車速Vおよびヨーレートγから仮想操舵角δ′を算出し、目標駆動力配分量に対する実駆動力配分量の偏差が小さくて制動力配分装置を作動させる必要がないときには、入力操舵角確定部M9が制動力配分制御電子制御ユニットUbへの入力操舵角δ* として前記仮想操舵角δ′を出力する。これにより、駆動力配分装置を優先的に作動させて制動力配分装置の作動量を最小限に抑え、制動力配分装置の作動に伴う車両の減速を防止しながら、既存の制動力配分制御電子制御ユニットUbを設計変更することなくそのまま使用してコストダウンに寄与することができる。
(もっと読む)
車両の制御装置及び制御方法

【課題】
対地速度センサが異常と判定された場合に、車両挙動が不安定になることを抑制する。
【解決手段】
車輪速センサの出力信号から求めた車輪速に基づいて第1推定車体速を求める第1車体速推定部3と、対地速度センサの異常状態を検出する対地速度センサ異常検出部6と、対地速度センサの出力信号から求めた車体速、第1推定車体速、及び対地速度センサの異常状態に基づいて第2推定車体速を求める第2車体速推定部5と、車両制御において使用する推定車体速を選択する推定車体速選択部7と、対地速度センサの異常状態に基づいて、車体速と車輪速に基づいて車両を制御する第1の車両制御部8と、推定車体速選択部7により選択された推定車体速に基づいて車両を制御する第2の車両制御部9のいずれかを選択する車両制御選択部10とを有する車両の制御装置。
(もっと読む)
車両の運動制御装置
【課題】車両の運動制御装置において、電動モータの回転数を低下させてもホイールシリンダに対する増圧応答性を適切に得る。
【解決手段】車両の運動制御装置は、モータ制御手段(306,314)が電動モータ33の回転数を低下させる場合、弁制御手段(ステップ312,314)が、マスタシリンダとホイールシリンダとの間に介在する液圧制御対象の増圧弁を駆動してホイールシリンダ側に流出される単位時間あたりのブレーキ液の流量を増大させる。
(もっと読む)
車両の運動制御装置
【課題】モータの負荷を考慮してポンプの作動音を低減すると共に、W/C圧を目標W/C圧にすることが円滑に行えるようにする。
【解決手段】横滑り防止制御の制御対象輪が含まれる制御系統が1つのみであるか2つであるかによりモータ60に掛かる負荷を判定する。そして、制御系統が1つのみの場合にはモータ60に掛かる負荷があまり大きくないと判定して、目標W/C圧の大小に関わらず第1、第2差圧制御弁16、36のうち制御対象輪の配管系統に含まれる側の差圧制御弁で発生させる差圧を一定値に設定する。また、制御系統が2つのみの場合にはモータ60に掛かる負荷が大きいと判定して、目標W/C圧の大きさに応じて第1および第2差圧制御弁16、36で発生させる差圧を設定する。これにより、ポンプ19、39の吐出口側のブレーキ液圧が比較的高くならないようにされ、ポンプ駆動が抑制されないようにできる。
(もっと読む)
車両用トラクション制御装置
【課題】左右の駆動輪のスリップが交互に大きくなるスリップのハンチングを防止することが可能な車両用トラクション制御装置を提供する。
【解決手段】ディファレンシャル15を介して駆動力が伝達される左右の後輪12L、12Rを有する車両10に適用され、スキッドコントロールコンピュータ30が左右の後輪12L、12Rのうち加速スリップが大きい後輪に対して制動力を付加するトラクション制御装置において、スキッドコントロールコンピュータ30は、左右の後輪12L、12Rの両方がスリップしている場合、加速スリップが大きい後輪に対して付加する制動力を制限する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 3軸以上の多数の車軸を備えた車両をヨーモーメント制御するにあたり、車
両走行時の挙動修正を的確に行い、車両走行時の安定性を高める。
【解決手段】 3軸以上の車軸が設けられた車両100の最も前の車軸と最も後ろの車軸
を除いた中間軸のタイヤに加えるブレーキ力を調整することにより、車両100のヨーモ
ーメントを制御する。
(もっと読む)
摩擦係合部の温度に基づいて前後輪間摩擦制動力配分を変更する車輌
【課題】自動車等の車輌の摩擦制動装置の摩擦係合部の温度がフェードを生ずるような温度に上昇することがあるとしても、各車輪に於ける摩擦係合部の間に温度差が生じていれば、まずそうなるのは、最も大きな温度上昇を生じている摩擦係合部のみのであり、その他の車輪の摩擦係合部には尚まだ温度上昇に余裕があることに着目して摩擦制動装置の耐負荷性能を向上させる。
【解決手段】前輪摩擦制動手段または後輪摩擦制動手段のいずれか一方の摩擦係合部の温度が限界値を越えたとき、摩擦係合部の温度が限界値を越えた前輪側または後輪側の摩擦制動手段の制動力の一部を前後反対側の摩擦制動手段へ移転させる。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンブレーキ(スロットル弁開閉アクチュエータ20)及び車輪ブレーキ(車輪ブレーキ作動手段21)の両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する場合に、ブレーキ作動開始初期に制御が不安定になるのを防止する。
【解決手段】エンジンブレーキ及び車輪ブレーキの両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する際に、エンジンブレーキを車輪ブレーキよりも所定時間だけ遅延させて作動開始させる。
(もっと読む)
安全装置
【課題】潜り込み後の衝突が発生した場合でも、乗員を衝突から適切に保護することができる安全装置を提供すること。
【解決手段】本発明による安全装置1は、車両の前方端部が前方障害物に対して衝突することなく前方障害物の下方に潜り込み、前記車両の乗員と前記前方障害物が直接衝突する可能性を有すること、つまりは潜り込みを検出する検出手段6を備えることを特徴とすることを特徴とする。
(もっと読む)
車両用安全装置
【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
車両の障害物認識装置
【課題】自車両前方の障害物を検知する障害物検知手段(レーダ装置1)を備えた車両の障害物認識装置において、ヨーレートセンサ13の検出値と自車両Wの車速を検出する車速検出手段(車速センサ12)により検出された車速とに基づいて自車両Wの進行路を推定する場合に、自車両Wの走行状況に応じて、その推定を出来る限り正確に行えるようにする。
【解決手段】車速検出手段により検出された車速に応じて、ヨーレートセンサ13の検出値を補正する。具体的には、車速検出手段により検出された車速が所定車速以上であるときには、該所定車速よりも小さいときに比べて、ローパスフィルタのカットオフ周波数を低くする。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動制御の精度および運転性を向上させることができる車両の挙動制御装置を提供すること。
【解決手段】挙動制御装置1は、ECU2を備える。ECU2は、車体スリップ角βを算出し(ステップ2)、目標スリップ角βrを算出し(ステップ3)、車体スリップ角βを目標スリップ角βrに収束させるように、目標車輪速Ws_cmdを算出し(ステップ4)、車体スリップ角βの目標スリップ角βrへの収束速度を決定する切換関数設定パラメータVPOLEを、車体スリップ角βに応じて設定する(ステップ31〜35)とともに、所定期間中でのβ≧βrの発生頻度に応じて、目標スリップ角βrを変更する(ステップ19〜21)。
(もっと読む)
車両の挙動制御装置
【課題】運転者の技量に合わせて適切な時期に制御を開始するよう構成された旋回中の車両のヨー方向の挙動を修正するための車両挙動制御装置を提供すること。
【解決手段】本発明の車両挙動制御装置は、車両のいずれかの車輪のグリップ力が限界を越えていることを検出する手段と、車両のいずれかの車輪のグリップ力が限界を越えたことが検出された時点から待機時間の経過後に挙動制御が必要であるか否かを判定する手段とを含み、挙動制御が必要であると判定されたときに挙動制御の実行を開始することを特徴とする。挙動制御が必要か否かは、現在の時点から所定の予測時間が経過したときの車両がスピン状態になるか否かを予測することにより行う。
(もっと読む)
自動制動装置
【課題】運転者が操作入力を怠った場合でも自車両と障害物との衝突を回避する可能性を高めることのできる自動制動装置を低コストで実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突の可能性を判断する衝突可能性判断手段と、運転者の操作入力を検出する操作入力検出手段4と、障害物と自車両の左右方向の位置関係を検出する位置関係検出手段2と、位置関係検出手段2の検出結果に基づいて自車両の回避可能方向を判断する回避可能方向判断手段と、衝突可能性判断手段により障害物に衝突する可能性があると判断され、かつ操作入力検出手段4により運転者の操作入力が検出されていない場合に、回避可能方向への自車両の回頭性が高まるように、各車輪のブレーキ力に差を生じさせてブレーキ20を自動作動させるブレーキ力制御手段と、を備える。
(もっと読む)
車両負荷制御装置
【課題】 制御の起動トリガが故障した場合であっても、制御を継続可能な車両負荷制御装置を提供する。
【解決手段】 運転者による運転状態を検出する運転状態検出手段と、車両状態を制御する負荷と、負荷の制御量を演算する第1制御手段と、第1制御手段により演算された制御量に基づき負荷を駆動する第2制御手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第1起動信号を伝達する第1通信手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第2起動信号を伝達する第2通信手段と、第2制御手段に対し電流を供給する電源と、第2制御手段と電源とを接続する電源リレーと、第2制御手段に設けられ、電源リレーを通電側に保持する電源保持手段とを備え、第2制御手段は、第1起動信号と第2起動信号を監視する。
(もっと読む)
車両の運動制御装置の支持構造
【課題】車両の運動制御装置の支持構造において、様々な方向の振動に対してバランスのよい入力振動減衰特性および振動伝達抑制特性を得ることができるようにして、車両の運動制御装置における車両挙動の検出精度を向上させる。
【解決手段】車両の各ホイールシリンダに付与される液圧を個別に制御するための複数の液圧機器を搭載した液圧ユニット21と、車両の挙動を検出する車両挙動センサが設けられているとともに液圧ユニット21を制御するコントロールユニット22と、が一体化されてなる車両の運動制御装置13を、車両Mの車体Bに固定されたブラケット70に3つの支持弾性部材81〜83を介して支持する車両の運動制御装置の支持構造であって、支持弾性部材81〜83の各支持方向は、3次元座標系の3つの座標軸と平行である三方向である。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
制駆動力制御装置、自動車及び制駆動力制御方法
【課題】目標前後加速度及び目標ヨーモーメントを発生させる制御時に、車両挙動をより安定化すること。
【解決手段】目標前後加速度αに基づいて目標合計制駆動力Fdを設定し、その目標合計制駆動力Fdを目標ヨーモーメントに基づいて左前後輪13FL、13RL及び右前後輪13FR、13RRに分配し、左前後輪13FL、13RLの摩擦円利用率qijの差及び右前後輪13FR、13RRの摩擦円利用率qijの差がそれぞれ小さくなるように前記左右輪に分配された目標合計制駆動力Fdを前輪及び後輪に分配した。そのため、摩擦円利用率qijが高い車輪の制駆動力が低減され、摩擦円利用率qijが低い車輪により多くの制駆動力が配分されるので、目標前後加速度α及び目標ヨーモーメントMを発生させる制御時に、特定の車輪13FL〜13RRだけタイヤグリップ力限界を超えることを防止でき、車両挙動がより安定化される。
(もっと読む)
車両制御装置
【課題】走行中におけるパーキングブレーキの制動時に車両の操縦安定性を確保できる車両制御装置を提供する。
【解決手段】車両制御装置を、車両の挙動に応じて車両の一部の車輪を制動してヨーモーメントを発生させるヨーモーメント制御手段100と、ヨーモーメント制御手段100の作動スタンバイ状態と非作動状態とを選択する選択手段170と、走行中におけるパーキングブレーキ装置10の制動を検出する動的制動検出手段110とを備え、ヨーモーメント制御手段100は、非作動状態での走行中におけるパーキングブレーキ装置10の制動の検出に応じて、非作動状態から作動スタンバイ状態へ変更する構成とする。
(もっと読む)
車両の障害物検知装置
【課題】急なカーブで障害物検知手段(レーダ装置)が対向車Qをいきなり検知したときであっても、その対向車Qの進行方向を正確に推定して、自車両Wの対向車Qへの衝突可能性を正確に予知する。
【解決手段】対向車Qについて検出された複数(A点〜E点)の相対位置(対向車Qの自車両Wに対する相対位置)に基づいて、該対向車Qの前面が自車両Wに対して向いている方向を推定し、この推定された対向車前面の向きに基づいて、該対向車の進行方向を推定し、自車両Wの進行路と、上記推定された対向車の進行方向と、該対向車について検出された相対位置及び相対速度ベクトルの大きさとに基づいて、自車両Wの該対向車Qへの衝突の可能性を予知する。
(もっと読む)
1 - 20 / 384
[ Back to top ]