
Fターム[3D046HH25]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903)
Fターム[3D046HH25]の下位に属するFターム
車体前後方向 (371)
Fターム[3D046HH25]に分類される特許
1 - 20 / 532
車両の走行安全装置
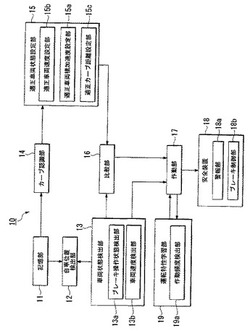
【課題】運転者の運転特性に応じて安全装置の作動し易さ、し難さを変更する。
【解決手段】道路データに基づき自車両の進行方向に存在するカーブ形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部15と、車両状態検出部13が検出した車両状態と適正車両状態設定部15が設定した適正車両状態とを比較する比較部16と、自車両の車両状態が適正車両状態にないときに自車両の安全装置18を作動させる作動部17と、カーブに対する作動部17の作動頻度を算出する作動頻度算出部19aと、作動部17の作動頻度に基づいて運転者の運転特性を学習する運転特性学習部19と、を備え、作動部17は学習した運転者の運転特性に基づいて安全装置18の作動内容を変更する。
(もっと読む)
ばね下制振装置

【課題】車輪を制動するディスクブレーキ装置を構成するブレーキキャリパを動吸振器の質量体として用いてばね下の制振を行う場合に、広範な周波数域のばね下振動を低減することができるようにする。
【解決手段】ブレーキキャリパ2に設けられた摩擦パッド4をブレーキロータ3に対して圧接動作させる液圧を発生する液圧制御回路13を制御するコントローラ31を備え、このコントローラが、車輪の制動を要しない通常走行時に、摩擦パッドをブレーキロータに圧接させるように液圧制御回路を制御して、動吸振器の質量体としてのブレーキキャリパに、ブレーキロータと摩擦パッドとの間の摩擦力を作用させるようにする。
(もっと読む)
車両のブレーキ制御装置
【課題】 ブレーキトルクセンサの配線の断線や短絡だけでなく、ゲインずれやドリフトを精度良く診断可能な車両のブレーキ制御装置を提供することである。
【解決手段】 左右前輪及び左右後輪にそれぞれ装着される複数の車輪ブレーキと、各車輪ブレーキが発生しているブレーキトルクを検出する複数のブレーキトルクセンサと、各車輪ブレーキのブレーキトルクを個別に制御する複数のアクチュエータと、各ブレーキトルクセンサの検出に基づいて、前記各アクチュエータを作動させて車輪のアンチロック制御又は車両の旋回姿勢制御を行うコントローラとを備えた車両のブレーキ制御装置において、前記コントローラは、各ブレーキトルクセンサの検出値を相互に比較してその比較結果に基づいて各ブレーキトルクセンサの故障を診断する故障診断手段と、前記アンチロック制御又は前記旋回姿勢制御を行っているときには前記故障診断手段の診断を禁止する診断禁止手段と、を含んでいることを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】現在のみならず将来予測される危険度を考慮して最適な回避ルートを通過するように制御して安全性を向上させる。
【解決手段】制御ユニット5は、自車両1の周辺に存在する白線、ガードレール、側壁、及び、立体物のそれぞれを対象として、現在のトータルリスク関数を設定し、各対象の位置の時間的変化を予測してトータルリスク関数の時間的変化を予測して、このトータルリスク関数の時間的変化を基に各時間毎の自車位置におけるY軸方向の極小点を演算する。そして、各時間毎の目的関数を作成し、該目的関数を最小とする各時間毎の旋回制御量を自車両の旋回制御量として演算して、自車両が各時間毎の旋回制御量で移動したときの各ルート毎のリスク関数を設定し、各ルート毎のリスク関数から最終的な回避ルートを選択し、最終的な回避ルートに基づいて操舵制御、及び、ブレーキ制御を実行させる。
(もっと読む)
車両の運動制御装置
【課題】モータの負荷を考慮してポンプの作動音を低減すると共に、W/C圧を目標W/C圧にすることが円滑に行えるようにする。
【解決手段】横滑り防止制御の制御対象輪が含まれる制御系統が1つのみであるか2つであるかによりモータ60に掛かる負荷を判定する。そして、制御系統が1つのみの場合にはモータ60に掛かる負荷があまり大きくないと判定して、目標W/C圧の大小に関わらず第1、第2差圧制御弁16、36のうち制御対象輪の配管系統に含まれる側の差圧制御弁で発生させる差圧を一定値に設定する。また、制御系統が2つのみの場合にはモータ60に掛かる負荷が大きいと判定して、目標W/C圧の大きさに応じて第1および第2差圧制御弁16、36で発生させる差圧を設定する。これにより、ポンプ19、39の吐出口側のブレーキ液圧が比較的高くならないようにされ、ポンプ駆動が抑制されないようにできる。
(もっと読む)
車両用トラクション制御装置
【課題】左右の駆動輪のスリップが交互に大きくなるスリップのハンチングを防止することが可能な車両用トラクション制御装置を提供する。
【解決手段】ディファレンシャル15を介して駆動力が伝達される左右の後輪12L、12Rを有する車両10に適用され、スキッドコントロールコンピュータ30が左右の後輪12L、12Rのうち加速スリップが大きい後輪に対して制動力を付加するトラクション制御装置において、スキッドコントロールコンピュータ30は、左右の後輪12L、12Rの両方がスリップしている場合、加速スリップが大きい後輪に対して付加する制動力を制限する。
(もっと読む)
制動制御装置
【課題】前輪と後輪が回生について非対称である車両について、要求総制動力に対する制御精度が高くて滑らかな制動を可能とし、しかも走行安定性を確保しつつ回生量を増加させることができるようにする。
【解決手段】制動制御装置は、要求総制動力の配分を制御する制動力配分手段を備えており、制動力配分手段は、回生配分で要求総制動力の配分を行う。そしてその回生配分は、前輪と後輪が同時にロックする配分を与える理想配分線ILよりも後輪に配分率が偏る後輪優位の範囲であり、かつ制動時の路面摩擦係数との関係で後輪がロックする後輪ロック限界線μ2L以下の範囲であることを条件とし、さらに要求総制動力の変化に伴う前輪制動力の変化に対する後輪制動力の変化の比率である後輪制動力変化率が常に正となることを条件とするようにされている。
(もっと読む)
摩擦係合部の温度に基づいて前後輪間摩擦制動力配分を変更する車輌
【課題】自動車等の車輌の摩擦制動装置の摩擦係合部の温度がフェードを生ずるような温度に上昇することがあるとしても、各車輪に於ける摩擦係合部の間に温度差が生じていれば、まずそうなるのは、最も大きな温度上昇を生じている摩擦係合部のみのであり、その他の車輪の摩擦係合部には尚まだ温度上昇に余裕があることに着目して摩擦制動装置の耐負荷性能を向上させる。
【解決手段】前輪摩擦制動手段または後輪摩擦制動手段のいずれか一方の摩擦係合部の温度が限界値を越えたとき、摩擦係合部の温度が限界値を越えた前輪側または後輪側の摩擦制動手段の制動力の一部を前後反対側の摩擦制動手段へ移転させる。
(もっと読む)
液圧ブレーキ装置およびその制御方法
【課題】液圧ブレーキ装置において、液漏れ等の失陥発生時にリザーバタンクからの空気吸い込みを防止しつつブレーキの制御可能時間を延長する。
【解決手段】液面スイッチ80は、リザーバタンクの予め定められた下限液面へのブレーキ液面の低下を検知する。タイマ部108は、リザーバタンク内の液面の傾斜によって液面スイッチがブレーキ液面の低下を検知する第1時刻から、車両が加減速しておらずブレーキ液面が水平であるときに液面スイッチがブレーキ液面の低下を検知する第2時刻までの経過時間を計測する。液漏れ推定部103は、第1時刻の加速度を参照して液面高さマップ保持部102から対応する液面高さを取得し、経過時間と液面高さからブレーキ液面低下速度を算出する。猶予時間算出部110は、ブレーキ液面低下速度に基づいて液圧ブレーキ装置の制御を停止するまでの猶予時間を計算する。
(もっと読む)
車両用安全装置
【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
車両の障害物認識装置
【課題】自車両前方の障害物を検知する障害物検知手段(レーダ装置1)を備えた車両の障害物認識装置において、ヨーレートセンサ13の検出値と自車両Wの車速を検出する車速検出手段(車速センサ12)により検出された車速とに基づいて自車両Wの進行路を推定する場合に、自車両Wの走行状況に応じて、その推定を出来る限り正確に行えるようにする。
【解決手段】車速検出手段により検出された車速に応じて、ヨーレートセンサ13の検出値を補正する。具体的には、車速検出手段により検出された車速が所定車速以上であるときには、該所定車速よりも小さいときに比べて、ローパスフィルタのカットオフ周波数を低くする。
(もっと読む)
車両の制動制御装置
【課題】センターデファレンシャルを搭載している車両を含めた直結4輪駆動状態となる駆動状態モードを有する車両について、車両が直結4輪駆動状態となったときでも、車両の挙動を安定させる制動制御を行うことができる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車両の挙動を安定させる制動制御を行う制動制御装置80であって、
前記車両の駆動状態を切り替える駆動状態切替手段60と、
前記車両のスリップ状態を検出するスリップ状態検出手段10と、
前記制動制御の作動許可を判定する制動制御許可判定手段30とを備え、
前記制動制御許可判定手段は、前記駆動状態切替手段により前記車両が直結4輪駆動状態とされたときには、前記スリップ状態検出手段により検出されたスリップ状態が所定のスリップ状態を越えたときに、前記制動制御の作動許可を行うことを特徴とする。
(もっと読む)
車両状態判定装置
【課題】タイヤがグリップ状態にあるときに、ロール角加速度に基づいて車両のロール状態を判定することにより、特別なセンサ等を設けることなく、適切にロール状態を判定する車両状態判定装置を提供することを目的とする。
【解決手段】本発明は、タイヤ91a、91bによる路面のグリップ状態を判定するグリップ判定手段10と、
車両100のロール角加速度を算出するロール角加速度算出手段20と、
操舵角を検出する操舵角検出手段30とを備え、
前記グリップ判定手段によりグリップ状態にあると判定されたときに、前記ロール角加速度算出手段により推定されたロール角加速度と、前記操舵角検出手段により検出された操舵角とに基づいて、ロール状態判定を行うことを特徴とする。
(もっと読む)
自動制動装置
【課題】運転者が操作入力を怠った場合でも自車両と障害物との衝突を回避する可能性を高めることのできる自動制動装置を低コストで実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突の可能性を判断する衝突可能性判断手段と、運転者の操作入力を検出する操作入力検出手段4と、障害物と自車両の左右方向の位置関係を検出する位置関係検出手段2と、位置関係検出手段2の検出結果に基づいて自車両の回避可能方向を判断する回避可能方向判断手段と、衝突可能性判断手段により障害物に衝突する可能性があると判断され、かつ操作入力検出手段4により運転者の操作入力が検出されていない場合に、回避可能方向への自車両の回頭性が高まるように、各車輪のブレーキ力に差を生じさせてブレーキ20を自動作動させるブレーキ力制御手段と、を備える。
(もっと読む)
自動制動装置
【課題】車両の走行状態や運転者の操舵入力又は制動入力に対する車両の走行状態の応答特性に合わせてタイミングよくブレーキを自動作動させることのできる自動制動装置を実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突を操舵により回避可能な障害物までの操舵回避距離を算出する操舵回避距離算出手段と、自車両と障害物との実距離Lが前記操舵回避距離より短くなるとブレーキ15を自動作動させる自動ブレーキ作動手段と、自車両の走行状態を検出する走行状態検出手段5と、を備え、走行状態検出手段5の検出結果に基づいて、操舵により障害物への衝突を回避すると自車両が不安定になると判断される場合には、自動ブレーキ作動手段によるブレーキ15の自動作動開始時期を早めるように、前記自動ブレーキ作動手段を構成する。
(もっと読む)
車両の挙動制御装置
【課題】運転者の技量に合わせて適切な時期に制御を開始するよう構成された旋回中の車両のヨー方向の挙動を修正するための車両挙動制御装置を提供すること。
【解決手段】本発明の車両挙動制御装置は、車両のいずれかの車輪のグリップ力が限界を越えていることを検出する手段と、車両のいずれかの車輪のグリップ力が限界を越えたことが検出された時点から待機時間の経過後に挙動制御が必要であるか否かを判定する手段とを含み、挙動制御が必要であると判定されたときに挙動制御の実行を開始することを特徴とする。挙動制御が必要か否かは、現在の時点から所定の予測時間が経過したときの車両がスピン状態になるか否かを予測することにより行う。
(もっと読む)
クリープグローンを抑制する車輌用制動装置
【課題】ブレーキペダルの踏み込みに応じてブレーキディスクにブレーキパッドを押し付けることにより車輪の回転を制動する車輌用制動装置に於いて、クリープグローン抑制のために制動力が所定の目標値より外れる度合を最小限に抑えてクリープグローンの発生に遅れなく対処することができる車輌用制動装置を提供する。
【解決手段】車輪がブレーキペダルの踏み込み度合の低下に伴って回転し始めたときから始まって、一時的にブレーキディスクにブレーキパッドを押し付ける押圧力をブレーキペダルの踏み込み度合に対応する値より低減する。
(もっと読む)
車輪情報取得装置および車両制御装置
【課題】車輪に作用する加速度情報から得られる情報を精度よく取得可能とする。
【解決手段】車輪側装置は、車輪14の加速度を検出する加速度センサ68と、その加速度センサ68による検出情報を含む車輪情報を送信可能なTPMS送信機とを収容したケース62を有し、そのケース62が車輪14を構成するタイヤ30とホイール50との間に形成された内部空間Sに配置される。車体側装置は、TPMS送信機から送信された車輪情報を受信する受信部と、車輪14の回転に伴う遠心力によるケース62の変位量を推定する変位量推定部と、受信された車輪情報に含まれる加速度情報から得られる横力をケース62の変位量に基づいて補正する補正部とを有する。
(もっと読む)
車両の制動制御装置
【課題】センターデフロック状態又は直結4輪駆動状態であっても、制動制御を行い、運転者の運転を適切に支援できる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車輪への制動力を制御して、車両の旋回中の挙動を安定させる車両の制動制御装置80であって、
前記車両の旋回状態を検出する旋回状態検出手段10と、
該旋回状態検出手段により検出された旋回状態に基づいて、前記車両の各車輪の制動制御量を設定する制動制御量設定手段20と、
該制動制御量設定手段により設定された制動制御量に基づいて、前記各車輪の制動制御を行う制動制御手段50と、
前記車両が走行している路面の路面摩擦係数を推定する路面摩擦係数推定手段30とを備え、
前記制動制御量設定手段は、前記車両がセンターデフロック状態又は直結4輪駆動状態のときには、前記各車輪の制動制御量の上限を、前記路面摩擦係数推定手段により推定された路面摩擦係数に応じて変更することを特徴とする。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
1 - 20 / 532
[ Back to top ]