
Fターム[3D046HH26]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903) | 車体前後方向 (371)
Fターム[3D046HH26]に分類される特許
1 - 20 / 371
ブレーキ装置
【課題】パーキングブレーキにおけるケーブルの摩擦特性を取得する。
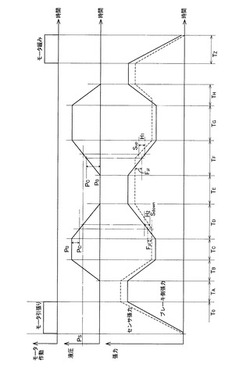
【解決手段】ドラムブレーキが、パーキングブレーキとサービスブレーキとで共通のものとされている。ケーブルが引っ張られてパーキングブレーキが作用状態にある場合において、サービスブレーキのブレーキシリンダの液圧が増加させられると、インナケーブルのブレーキ側張力が減少させられる(期間TF)。インナケーブルのブレーキ側張力は、ブレーキシリンダの液圧の増加に伴って減少させられるが、液圧の増加量とブレーキ側張力の減少量との関係は既知である。また、ケーブルの摩擦により、ブレーキ側張力が変化しても、その変化に遅れて張力センサによる検出値が変化する。以上の事情から、液圧の増加が開始されてから張力センサによる検出値が減少するまでの間の、増圧量(Pc−P0)に基づけば、ケーブルの摩擦力を取得することができる。
(もっと読む)
車両の制御装置及び制御方法

【課題】
対地速度センサが異常と判定された場合に、車両挙動が不安定になることを抑制する。
【解決手段】
車輪速センサの出力信号から求めた車輪速に基づいて第1推定車体速を求める第1車体速推定部3と、対地速度センサの異常状態を検出する対地速度センサ異常検出部6と、対地速度センサの出力信号から求めた車体速、第1推定車体速、及び対地速度センサの異常状態に基づいて第2推定車体速を求める第2車体速推定部5と、車両制御において使用する推定車体速を選択する推定車体速選択部7と、対地速度センサの異常状態に基づいて、車体速と車輪速に基づいて車両を制御する第1の車両制御部8と、推定車体速選択部7により選択された推定車体速に基づいて車両を制御する第2の車両制御部9のいずれかを選択する車両制御選択部10とを有する車両の制御装置。
(もっと読む)
シフト制御システム
【課題】車両停止時におけるPスイッチの操作に際して運転者に違和感を与えることのないシフト制御システムを提供する。
【解決手段】車両が完全に停止していないにもかかわらず運転者がPレンジへの切替要求を入力した場合、直ちにPレンジに切り替えるのではなく、ホイールシリンダ圧が所定の保持圧Phに保持される。つまり、ホイールシリンダ圧を残し、車両の停止が推定される保持時間Δtの経過後にPレンジに切り替えられる。また、そのPレンジのロック機構を作動させた後に、ホイールシリンダ圧を保持圧Phから所定の減圧勾配をもって徐々に減圧させるようにする。
(もっと読む)
車両の運動制御装置
【課題】車両の運動制御装置において、電動モータの回転数を低下させてもホイールシリンダに対する増圧応答性を適切に得る。
【解決手段】車両の運動制御装置は、モータ制御手段(306,314)が電動モータ33の回転数を低下させる場合、弁制御手段(ステップ312,314)が、マスタシリンダとホイールシリンダとの間に介在する液圧制御対象の増圧弁を駆動してホイールシリンダ側に流出される単位時間あたりのブレーキ液の流量を増大させる。
(もっと読む)
車両の横転防止装置
【課題】トラクタヘッド側でトレーラのロール角検出が正確に行える連結車両の横転防止装置を提供する。
【解決手段】トラクタのロール角を推定するトラクタロール角推定部(1)と、トラクタとトレーラの連結総重量を推定する連結総重量推定部(2)と、トラクタ及びトレーラを結合するカプラーが受ける荷重を推定する荷重推定部(3)と、該荷重と該連結総重量とトラクタロール角から、トレーラのロール角を推定演算するトレーラロール角推定部(4)と、を備える。
(もっと読む)
四輪駆動車の制御装置
【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、自励振動の発生に関係する少なくとも一つの要素の量を自動的に変更して、自励振動を制御する自励振動制御手段2とを備え、自励振動制御手段2は、アクセルペダル操作と独立に、エンジントルクを制御するエンジントルク制御手段21を備える。
(もっと読む)
制動制御装置
【課題】前輪と後輪が回生について非対称である車両について、要求総制動力に対する制御精度が高くて滑らかな制動を可能とし、しかも走行安定性を確保しつつ回生量を増加させることができるようにする。
【解決手段】制動制御装置は、要求総制動力の配分を制御する制動力配分手段を備えており、制動力配分手段は、回生配分で要求総制動力の配分を行う。そしてその回生配分は、前輪と後輪が同時にロックする配分を与える理想配分線ILよりも後輪に配分率が偏る後輪優位の範囲であり、かつ制動時の路面摩擦係数との関係で後輪がロックする後輪ロック限界線μ2L以下の範囲であることを条件とし、さらに要求総制動力の変化に伴う前輪制動力の変化に対する後輪制動力の変化の比率である後輪制動力変化率が常に正となることを条件とするようにされている。
(もっと読む)
ブレーキ装置
【課題】液圧式ブレーキがフェードした場合であっても適切な制動力を得ることができ、乗用車等の小型車にも適用が容易なブレーキ装置を提供する。
【解決手段】ブレーキ装置を、ブレーキフルードの圧力に応じた制動力を発生する液圧式ブレーキ80と、電動アクチュエータ20によって駆動される電動式ブレーキ10と、液圧式ブレーキ80のフェード状態を検出するフェード状態検出手段40と、液圧式ブレーキ80のフェード状態が生じた場合に、フェード状態による液圧式ブレーキ80の制動力低下量に応じた制動力で電動式ブレーキを制動させる電動式ブレーキ制御手段40とを備える構成とする。
(もっと読む)
ブレーキ制御装置
【課題】車両の様々な状態を考慮して、パーキングブレーキ作動部材の操作力を確実に軽減させる。
【解決手段】ブレーキ制御装置200において、車輪速センサ96は車両80の速度を検出し、ブレーキ温度推定部は、検出された車両80の速度を利用してブレーキパッドおよびディスクロータの温度を推定する。ECU70は、パーキングブレーキレバー93の作動が検出された場合に、推定されたブレーキパッドおよびディスクロータの温度に応じた圧力に、ホイールシリンダ88の作動液の液圧であるホイールシリンダ圧を増圧させる。
(もっと読む)
車両の挙動制御装置
【課題】運転者の技量に合わせて適切な時期に制御を開始するよう構成された旋回中の車両のヨー方向の挙動を修正するための車両挙動制御装置を提供すること。
【解決手段】本発明の車両挙動制御装置は、車両のいずれかの車輪のグリップ力が限界を越えていることを検出する手段と、車両のいずれかの車輪のグリップ力が限界を越えたことが検出された時点から待機時間の経過後に挙動制御が必要であるか否かを判定する手段とを含み、挙動制御が必要であると判定されたときに挙動制御の実行を開始することを特徴とする。挙動制御が必要か否かは、現在の時点から所定の予測時間が経過したときの車両がスピン状態になるか否かを予測することにより行う。
(もっと読む)
ブレーキ装置
【課題】ストロークシミュレータが正常に作動しないときにも、運転者の意思を反映させて十分な制動効果を得る。
【解決手段】ブレーキバイワイヤの実行時に、ストロークシミュレータ12の閉故障を検出した場合には、マスタシリンダ圧Pmに応じた目標減速度Gpを、最終目標減速度Gtとして算出する。すなわち、ペダルストロークSsに応じた目標減速度Gsは考慮しない。ストロークシミュレータ12が閉故障を起こした場合には、正常時と比較して同一の踏力に対してペダルストロークSsが小さくなる傾向にあることから、マスタシリンダ圧Pmのみを考慮することで、運転者の制動意思よりも制動力が小さくなってしまうのを防止できる。
(もっと読む)
車両の運動制御装置の支持構造
【課題】車両の運動制御装置の支持構造において、様々な方向の振動に対してバランスのよい入力振動減衰特性および振動伝達抑制特性を得ることができるようにして、車両の運動制御装置における車両挙動の検出精度を向上させる。
【解決手段】車両の各ホイールシリンダに付与される液圧を個別に制御するための複数の液圧機器を搭載した液圧ユニット21と、車両の挙動を検出する車両挙動センサが設けられているとともに液圧ユニット21を制御するコントロールユニット22と、が一体化されてなる車両の運動制御装置13を、車両Mの車体Bに固定されたブラケット70に3つの支持弾性部材81〜83を介して支持する車両の運動制御装置の支持構造であって、支持弾性部材81〜83の各支持方向は、3次元座標系の3つの座標軸と平行である三方向である。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両負荷制御装置
【課題】 制御の起動トリガが故障した場合であっても、制御を継続可能な車両負荷制御装置を提供する。
【解決手段】 運転者による運転状態を検出する運転状態検出手段と、車両状態を制御する負荷と、負荷の制御量を演算する第1制御手段と、第1制御手段により演算された制御量に基づき負荷を駆動する第2制御手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第1起動信号を伝達する第1通信手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第2起動信号を伝達する第2通信手段と、第2制御手段に対し電流を供給する電源と、第2制御手段と電源とを接続する電源リレーと、第2制御手段に設けられ、電源リレーを通電側に保持する電源保持手段とを備え、第2制御手段は、第1起動信号と第2起動信号を監視する。
(もっと読む)
車両後部追突時制動制御装置
【課題】車両が停車しているときや減速且つ停車直前のときに、追突荷重が車両後部の衝撃吸収構造の変形により吸収できない程過大な場合でも、乗員にダメージを軽減できる車両後部追突時制動制御装置を提供すること。
【解決手段】車両後部追突時制動制御装置1は、車両の走行速度を検出して速度信号を出力する車速センサ9と、車両への後続車の追突を検出して追突荷重信号を出力する加速度センサ10と、速度信号に基づいて車両の走行速度が低速または零であると判定し、且つ、追突荷重信号から車両に後続車の追突荷重が入力されたと判定したときに、車両の車輪に対してブレーキをかける制動制御部5とを備えている。しかも、制動制御部5は、追突荷重が前記車両の後部の衝撃吸収構造により吸収可能な範囲外であると追突荷重信号から判断したとき、車輪のブレーキを解除するようになっている。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
制動制御システム
【課題】ブレーキペダルが操作されたときに、路面状態に応じた最適な制動制御を迅速に実施すること。
【解決手段】ブレーキペダルが操作されたときに複数の車輪14の各々に与える制動力を車輪14毎に独立して制御する制動制御システム200において、路面状態推定部は、車輪14と路面との間の摩擦係数を算出する。制動制御部104は、右輪と路面との間の摩擦係数である右側摩擦係数と左輪と路面との間の摩擦係数である左側摩擦係数との差に基づいて、制動距離短縮制御および車両姿勢安定化制御のどちらかを、ブレーキペダルが操作されたときに実施するものとして、ブレーキペダルが操作されていないときに予め設定する。ブレーキペダルが操作されたときに、制動距離短縮制御および車両姿勢安定化制御のうち予め設定されているものを実施する。
(もっと読む)
制駆動力制御装置、自動車及び制駆動力制御方法
【課題】目標前後加速度及び目標ヨーモーメントを発生させる制御時に、車両挙動をより安定化すること。
【解決手段】目標前後加速度αに基づいて目標合計制駆動力Fdを設定し、その目標合計制駆動力Fdを目標ヨーモーメントに基づいて左前後輪13FL、13RL及び右前後輪13FR、13RRに分配し、左前後輪13FL、13RLの摩擦円利用率qijの差及び右前後輪13FR、13RRの摩擦円利用率qijの差がそれぞれ小さくなるように前記左右輪に分配された目標合計制駆動力Fdを前輪及び後輪に分配した。そのため、摩擦円利用率qijが高い車輪の制駆動力が低減され、摩擦円利用率qijが低い車輪により多くの制駆動力が配分されるので、目標前後加速度α及び目標ヨーモーメントMを発生させる制御時に、特定の車輪13FL〜13RRだけタイヤグリップ力限界を超えることを防止でき、車両挙動がより安定化される。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
制駆動力制御装置
【課題】制動力発生装置に経年変化や異常が生じても各車輪に適切な制動トルクを発生させること。
【解決手段】車輌の目標制動力と実際の車輌の制動力との差が所定値を超えたときに油圧制動トルク発生装置(ブレーキアクチュエータ23等)又はモータ31FL,31FR,31RL,31RRに異常ありと判定する制動装置異常判定手段41iを設け、この制動装置異常判定手段41iが異常ありと判定した際に、車輌の目標制動力と実際の車輌の制動力とを一致させるように設定された各車輪10FL,10FR,10RL,10RRの内の少なくとも一輪と残りの車輪の夫々の全制動トルク間の相対関係に基づいて要求機械制動トルク又は要求モータトルクを補正するよう要求油圧制動トルク設定手段41f又は要求モータトルク設定手段41gを構成すること。
(もっと読む)
1 - 20 / 371
[ Back to top ]