
Fターム[3D046HH35]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車輪状態 (1,034)
Fターム[3D046HH35]の下位に属するFターム
Fターム[3D046HH35]に分類される特許
1 - 20 / 27
駆動力配分制御装置
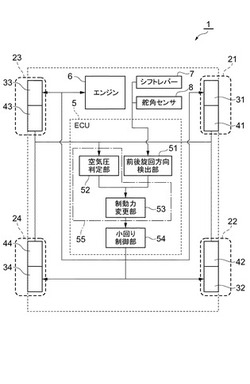
【課題】安全に小回り制御を実行することができる駆動力配分制御装置を提供する。
【解決手段】車両1の各輪21〜24の空気圧に関する情報を取得する空気圧情報取得手段41〜44を備え、車両1の旋回時に内輪の駆動力を小さくし、車両1の機械的特性で決まる最小回転半径よりもさらに回転半径を小さくする小回り制御を行う際、旋回内輪の空気圧情報に基づいて、駆動力変更手段55により車両1前後の内輪に対する駆動力の配分を変更することで、空気圧が低下している内輪が小さい駆動力で旋回することを回避し、これによって、リム外れを回避する。
(もっと読む)
車両運動制御装置及び制御方法

【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
制動制御システム
【課題】ブレーキペダルが操作されたときに、路面状態に応じた最適な制動制御を迅速に実施すること。
【解決手段】ブレーキペダルが操作されたときに複数の車輪14の各々に与える制動力を車輪14毎に独立して制御する制動制御システム200において、路面状態推定部は、車輪14と路面との間の摩擦係数を算出する。制動制御部104は、右輪と路面との間の摩擦係数である右側摩擦係数と左輪と路面との間の摩擦係数である左側摩擦係数との差に基づいて、制動距離短縮制御および車両姿勢安定化制御のどちらかを、ブレーキペダルが操作されたときに実施するものとして、ブレーキペダルが操作されていないときに予め設定する。ブレーキペダルが操作されたときに、制動距離短縮制御および車両姿勢安定化制御のうち予め設定されているものを実施する。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両制御装置、自動車およびタイヤ横力推定方法
【課題】車両のタイヤに発生する横力をより正確に推定すること。
【解決手段】自動車1は、前後輪の振る舞いを外乱によって駆動される一次遅れ系として表した状態方程式を用いて、その状態方程式に基づくカルマンフィルタによって状態推定を行うことにより、前後輪の横力を推定する。したがって、タイヤの振る舞いに対して成立する状態方程式の解としてタイヤ横力を得ることができるため、従来に比して、推定誤差がより少ないタイヤ横力の推定を行うことができる。
(もっと読む)
ホイールベース長設定装置
【課題】搭載される車両の実際のホイールベース長の差異に起因した車両性能のばらつきを抑制できると共に、搭載される車両の実際のホイールベース長に対応可能に構成することによるコスト増大を抑制できるホイールベース長設定装置を提供する。
【解決手段】ホイールベース長設定装置のECUは、車両Cの前輪が路面上の異物Fを踏んだ場合には、そのときの前側検出時間TVWF及び前側検出時車体速度を検出する。また、ECUは、車両Cの後輪が路面上の異物Fを踏んだ場合には、そのときの後側検出時間TVWR及び後側検出時車体速度を検出する。そして、ECUは、前側検出時間TVWF及び前側検出時車体速度と、後側検出時間TVWR及び後側検出時車体速度とから算出用ホイールベース長を算出し、該算出用ホイールベース長に基づきホイールベース長を設定する。
(もっと読む)
車両の電子制御システムおよびその制御方法
【課題】メインコントローラと少なくとも一つのローカルコントローラとの間に通信を行うと共に、相互間の情報を考慮して、制動装置および懸架装置を制御することにより、各コントローラの固有特性をさらに改善し、かつ、活性化させることができるのみならず、システムも単純化させることができる車両の電子制御システムおよびその制御方法を提供すること。
【解決手段】車両の情報を受信し、車両の制動制御信号および懸架制御信号を生成して出力するメインコントローラと、メインコントローラにより出力された懸架制御信号に応じて、各車輪のダンパを制御する少なくとも一つのローカルコントローラと、メインコントローラとローカルコントローラとの間のデータ通信を行うインターフェース部と、を備える。
(もっと読む)
制御装置及び車両
【課題】停車時のブレーキショックを運転者の技量によらず抑制することができる制御装置及び車両を提供すること。
【解決手段】油圧式の制動装置における制動力は、停車直前の低速領域におけるブレーキペダルの操作に対して、オンかオフかという極端な効き方となるため、ブレーキペダルの操作量を微妙にコントロールして、制動力を細かに制御することが困難であった。これに対し、本発明では、車輪のトウ角を機械的に増減させて制動力を制御する方式であるので、停車直前の低速領域においてもリニアな制動力を得ることができる。更に、停車直前の低速領域では、車両の速度の減少に伴って、前輪のトウ角の絶対値を減少させると共に後輪のトウ角を増加させるので、停車直後の車両の揺り返し挙動を抑制して、停車時のブレーキショックを抑制することができる。
(もっと読む)
車両運動制御装置
【課題】路面摩擦係数などの車輪路面状態の変化に対応して運転者の運転操作を支援する車両運動制御の介入タイミングを適正化する。
【解決手段】トルク検出手段22により検出されたセルフアライニングトルクと車両運動状態推定手段13により推定された推定運動状態量とから、予め設定されたタイヤモデルに基づいて車輪路面状態である路面摩擦係数を推定する車輪路面状態推定手段23を設け、推定された路面摩擦係数に応じて車両運動状態推定手段13の車両運動モデルに係るパラメータであるタイヤのコーナリングパワーKf、Krを変更するパラメータ設定手段26と、路面摩擦係数に応じて制御介入判断手段16の介入閾値を変更する介入閾値設定手段27を設けたことから、車両運動状態が安定な間であっても路面摩擦係数を高精度で推定できる。しかも、路面摩擦係数に応じて車両運動モデルのパラメータを変更するとともに、車両運動の制御介入閾値を変更していることから適正な制御介入タイミングを実現できる。
(もっと読む)
車両の運動制御装置
【課題】ヨーレート偏差に基づくアンダーステア抑制および横滑り角速度に基づくスピン抑制制御をともに実行可能とするとともに、コントロール性の向上を図る。
【解決手段】制御量決定手段13は、規範ヨーレートの絶対値が検出ヨーレートの絶対値よりも設定値以上大きい第1の状態ではヨーレート偏差に基づいて車両に旋回内向きのモーメントを発生させるように選択されたアクチュエータの第1の制御量を決定し、横滑り角速度が所定値を超える第2の状態では前記横滑り角速度に基づいて車両に旋回外向きのモーメントを発生させるように選択されたアクチュエータの第2の制御量を決定し、第1および第2の状態が同時に発生しているときには第1および第2の協調制御用制御量の絶対値のうち大きい方の値が対象とするアクチュエータを選択するとともに選択されたアクチュエータの制御量を第1および第2の協調制御用制御量の合算値として決定する。
(もっと読む)
上り坂上一時停止時に後退が抑止される車輌
【課題】車輪と路面の間の摩擦係数の把握精度の限界に対処し、上り坂での一時停止からの発進時に駆動輪に路面に対するグリップ限界越えを起こさせないよう、駆動力を優先的に使用して車輌を上り坂にて一時停止状態に保持する。
【解決手段】車輌が上り坂にて一時停止したとき、車輌の後退を抑止するために駆動輪に付与する駆動力と各輪に付与する制動力の大きさを車輪と路面の間のグリップ限界の大きさの推定に基づいて制御し、グリップ限界に対し残す余裕の大きさまたは比率を全ての車輪に於いて一様にする。
(もっと読む)
操舵装置
【課題】運転者によるステアリングホイールの保舵状態を安価な構成で把握すること。
【解決手段】ステアリングホイール11に対して振動を加える少なくとも1つの振動源(加振手段16)と、そのステアリングホイール11の振動状態を検出する振動検出手段44と、この振動検出手段44により検出された振動状態に基づいて運転者によるステアリングホイール11の保舵状態を推定する保舵状態推定手段34と、を備えること。ここで、その振動検出手段44は、ステアリングホイール11の左右均等な位置に夫々少なくとも1つずつ設けることが好ましい。
(もっと読む)
車輪用転がり軸受装置
【課題】簡単な構成とすることができ、センサの取り付けが容易であるとともに、精度よく車輪に作用する荷重による歪みを計測することができる車輪用転がり軸受装置を提供する。
【解決手段】車体側に固定される外輪1と、車輪が取り付けられる内軸2と、複列の転動体4,5を備えている。外輪1は、筒状の本体部6と、この本体部6から径方向外方へ伸びて車体側のナックル16と固定させるためのフランジ部7を有している。このフランジ部7の基部7aにアール面部10が形成されている。歪みゲージ11がアール面部10に貼り付けられており、歪み検出方向がアール面部10のアール形状に沿うようにされている。
(もっと読む)
タイヤ前後力推定装置
【課題】車輪の慣性モーメントの実際値が変化した場合であってもタイヤ前後力に対応する値を精度良く推定すること。
【解決手段】このタイヤ前後力推定装置は、車輪の回転運動方程式に基づく式「Tfxc=T+α・Ic・dω/dt」を利用してタイヤ前後力相当トルク推定値Tfxcを計算する。Tはホイールトルク、dω/dtは車輪の角加速度であり、これらはセンサ出力を利用して得られる。Icは車輪の諸元等から既知である車輪の慣性モーメント計算値である。αは慣性モーメント計算値Icを慣性モーメントの実際値に一致させるための補正係数である。αは、「dω/dtが「0」以外から「0」になる時点(時刻t2を参照)にてタイヤ前後力相当トルクの実際値Tfxの時間微分値が「0」となる」という関係を利用して、「α=m/(m−n)」なる式から求められる(m:同時点でのTの時間微分値、n:同時点でのTfxcの時間微分値)。
(もっと読む)
車両の制御装置
【課題】車輪にトルクを付与して車体のロール状態を制御する際に、車両に異常が生じた場合であっても、車両の挙動が不安定になってしまうことを回避できる制御装置を提供する。
【解決手段】前後輪を独立して車体に支持するサスペンション機構と、駆動トルクおよび制動トルクをそれぞれ独立して制御する制駆動トルク制御手段と、前後輪に駆動トルクもしくは制動トルクを付与して車体のロール状態を制御するロール制御手段と、車体に出力軸の軸線方向が車両の前後方向と平行もしくはほぼ平行に設置された駆動源とを備えた車両の制御装置において、駆動源の出力トルクを検出もしくは推定する駆動源トルク検出手段(ステップS1,S2,S4,S5)と、駆動源の出力トルクの変動が検出もしくは推定された場合に、ロール制御手段を制御して車体のロールを抑制するロール抑制手段(ステップS3,S6)とを備えている。
(もっと読む)
車両運動制御装置
【課題】車両の運動状態を表す状態方程式のシステム行列を構成する要素に基づいて、車両の運動状態の最適化を図る
【解決手段】第1の検出部22は、車両に加えられる運転操作量を検出する。第2の検出部23は、車両の状態を示す車両状態量を検出する。設定部21aは、検出された運転操作量に基づいて、特性値の目標値を設定す。演算部21bは、特性値の目標値と、特性値の現在値とに基づいて、付加モーメントを車両に付加するための制御量を算出する。制御部21cは、算出された制御量に基づいて、アクチュエータを制御する。この特性値は、それぞれが車両の運動状態を示す状態方程式のシステム行列を構成し、車両の運動状態の時系列応答に影響を与える複数のゲインのうち、付加モーメントによって補填可能なゲインを含む。
(もっと読む)
四輪独立駆動車の制駆動力配分装置
【課題】各輪のスリップやモータの過熱等で特に二輪以上の制駆動力が変化した場合あるいは特に二輪以上の制駆動力を変化させる場合においても、車両挙動の変化をゼロとするような制駆動力の再配分を行う装置を提供する。
【解決手段】四輪(1〜4)を独立に駆動可能な車両において、車両の平面運動での目標となる車両挙動を決定する目標車両挙動決定手段(8)と、この目標となる車両挙動を実現する四輪(1〜4)の制駆動力配分の集合を演算する制駆動力配分集合演算手段(8)と、この演算された制駆動力配分の集合の中から一つの制駆動力配分を選択する制駆動力配分選択手段(8)とを備える。
(もっと読む)
対地速度測定装置及び車両
【課題】 車両に既存の構成を利用して、対地速度を測定することができる対地速度測定装置及び車両を提供すること。
【解決手段】 複数の車輪の内の少なくとも1輪を自由転動させ(S15)、その自由転動する車輪の周速度を算出する(S16)。そして、その周速度に基づいて車両の対地速度を算出する(S17)。これにより、車両の対地速度を既存の構成を利用して安価に且つ安定して測定することができる。即ち、車両に既存の車輪を利用して対地速度を測定することができ、従来品のように、第5輪や光学センサなどの装置を別途設ける必要がない。その結果、部品コストや組み立てコストの低減を図り、安価に対地速度を測定することができる。
(もっと読む)
車輪外力推定装置
【課題】車輪に作用する外力の推定値を車輪に作用する実外力に近づけることができる車輪外力推定装置を提供することを目的とする。
【解決手段】車輪外力推定装置2は、車両ボデーと前記車輪とを連結支持するサスペンション1に作用する荷重に応じた出力信号Sを出力するセンサ21と、出力信号Sに対してサスペンション1の共振周波数Hf以上の周波数をカットオフ周波数とするローパスフィルタリング処理を行い、且つ、出力信号Sに対して微分演算して共振周波数を含む所定周波数帯内から選択された選択周波数に対応する角周波数により除算する微分演算処理を行い、共振周波数の周波数成分を含む第1信号S2を生成する第1信号生成部23と、出力信号Sから第1信号S2を除去した第2信号S3を生成する第2信号生成部24と、第2信号S3に基づき外力の推定値を演算する外力推定値演算部25とを備える。
(もっと読む)
タイヤの前後力検出方法、及びそれに用いるタイヤの前後力検出装置
【課題】 タイヤに作用する前後力を、構成簡易に、かつ高い信頼性及び精度を有して検出する。
【解決手段】 タイヤ2の円周線j上に少なくとも1つのマーク3と、マーク3の通過を検出しうる車体4側の第1のセンサ5と、車軸6の回転角度θを検出しうる第2のセンサ7と、第1,第2のセンサ5,7の情報に基づいてタイヤ2の前後力Frを演算する演算手段8とを具える。演算手段8は、マーク3が第1のセンサ5を通過した時点の、車軸6の回転角度θrを逐次記憶する。又予め記憶した無負荷回転角度θo(無負荷状態での車軸6の回転角度)と前記回転角度θrとの差(θo−θr)であるタイヤの捻れ角αrを演算し、予め求めた捻れ角αとタイヤの前後力Fとの関係式に基づき、前記捩れ角度αrから回転時のタイヤの前後力Frを逐次演算する。
(もっと読む)
1 - 20 / 27
[ Back to top ]