
Fターム[3D114BA16]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 対象物 (978) | 内部取付部品 (83)
Fターム[3D114BA16]の下位に属するFターム
シート (7)
ステアリングホイール (2)
電子部品(電子制御部品、オーディオ) (12)
インストルメントパネル (27)
Fターム[3D114BA16]に分類される特許
1 - 20 / 35
構造体設計支援装置
【課題】構造物の載荷時における各部品、または、部位の変形形態を定量的に評価し、構造体に要求される剛性を確保しつつ、重量を低減する設計指針を与えるための構造体設計支援装置を提供する。
【解決手段】構造体設計支援装置が、単一もしくは複数の部品から構成される構造体の少なくとも一部を構成する各部位の数値解析データを記憶する記憶部と、記憶部に記憶された数値解析データに基づいて、特定の境界条件下における構造体の変形を数値解析により定量化し、当該定量化した構造体の変形に基づいて、境界条件下における部品もしくは部品の一部の変形モードに関する情報を算出する算出部と、を有する。
(もっと読む)
ワーク搬送設備

【課題】自動車ボディーなどを前後縦向きに搬送する経路と左右横向きに搬送する経路とが組み合わされたワーク搬送設備を提供する。
【解決手段】ワーク搬送用走行体1は、ワーク支持台車2と、このワーク支持台車2の第一搬送経路L1における走行方向前後の少なくとも一方に隣接する補助台車3とから構成され、第一搬送経路L1には、ワーク支持台車2と補助台車3とを一体に走行させるワーク搬送用走行体駆動手段(22)が併設され、第一搬送経路L1から第二搬送経路L3への分岐点P1には、補助台車3をワーク支持台車2のみを第二搬送経路L3へ直角横向きに分岐導入させる台車分岐手段(24a,24b,25,27)が配設され、第二搬送経路L3には、ワーク支持台車2を、第一搬送経路L1における当該ワーク支持台車2の走行方向に対し直角横向きに走行させるワーク支持台車駆動手段(29)が併設された構成。
(もっと読む)
部品供給システム
【課題】ラインサイドの省スペース化を実現する部品供給システムを提供すること。
【解決手段】部品供給システムは、2種類の部品4を搭載して搬送する供給台車1と、台車スペース3を互いの間に形成しつつ2つの工程の近傍にそれぞれ固定配置された固定棚2とを有する。供給台車は、第1部品41を保持する第1レール111と、第2部品42を保持する第2レール112とを平面視において互いに平行に配設してなると共に、放出口12を第1レール及び第2レールの長手方向における互いに反対側の端部に設けてなる。放出口にはストッパー13が配設されている。2つの固定棚は受取口22を台車スペース側に配設し、各工程に部品を供給するための供給口を受取口に対して直交する位置であって互いに同じ方向に設け、部品を保持する受取レール21を有する。台車スペースに供給台車が配置されたとき、供給台車の放出口が固定棚の受取口に対向配置される。
(もっと読む)
生産順序再計画システム、生産順序再計画装置及び方法
【課題】遅延車両など、予め計画された生産計画順序の遵守が不可能となった車両が発生した場合に、遅延車両を考慮した生産計画順序を再計画できるようにする。
【解決手段】修正作業工程へ投入される車両を検出する車両通過検知装置4と、車両の修正作業の所要時間が入力される修正作業所要時間入力装置2A、2Bと、生産順序再計画装置1とを備え、生産順序再計画装置1が車両通過検知装置4から修正作業工程へ投入される車両を検出したとの通知を受けると、修正作業所要時間入力装置2A、2Bから入力された修正作業所要時間を基に、組立工程における車両生産順序を再計画する。
(もっと読む)
ワーク組付装置およびワーク組付方法
【課題】簡素な構成でワークを被組付部に位置決めできるワーク組付装置を提供すること。
【解決手段】サイドエアバッグ取付装置は、ピン挿通孔が形成されたサイドエアバッグを保持して、ピン挿入穴が形成されたサイドエアバッグ組付部に組み付ける。このサイドエアバッグ取付装置は、ハンド本体51およびこのハンド本体51に設けられた複数のワーク保持装置52を有するハンド50と、ハンド50の姿勢および3次元空間における位置を変化させるロボットアーム41と、これらを制御する制御装置と、を備える。ワーク保持装置52は、筒状のシリンダ53と、このシリンダ53に摺動可能に設けられて、先端がピン形状でありかつ基端側に磁力を有するボス部551が形成されたピン部材55と、ハンド本体51に設けられてシリンダ53をフローティング自在に支持するシリンダ支持部54と、を備える。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】被組付部をセンシングする回数を低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ組付部にサイドエアバッグを配置し、ねじを用いて、このサイドエアバッグをサイドエアバッグ組付部に固定する。このワーク組付方法は、サイドエアバッグ組付部に近接する部分に設けた3つの測定点を撮影する撮影工程と、この撮影した画像に基づいて、測定点の実際の位置A1〜C1を算出する位置算出工程と、この位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、サイドエアバッグとサイドエアバッグ組付部との相関位置を算出して位置決めする第1位置決め工程と、位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、ねじとサイドエアバッグ組付部との相関位置を算出して位置決めする第2位置決め工程と、を備える。
(もっと読む)
位置決め装置
【課題】ラゲージ及びバックドアのいずれにも共通して使用することのできる、位置決め装置を提供する。
【解決手段】ワーク101,102を載置して位置決めするための位置決め装置であって、ヒンジ部10を介して連結された第一の治具11及び第二の治具12と、ワーク101,102の形状に合わせてこの第一の治具11及び第二の治具12の開き角度を変化させる駆動機構13とを有する、位置決め装置1を構成する。
(もっと読む)
車両駆動軸整列装置
【課題】車体軸と車両駆動軸の間の角度的なオフセットを測定する器械の提供。
【解決手段】整列装置30が、車体軸ABと車両駆動軸ADの間の角度的なオフセットを測定する整列装置30は、車両10に取り付けるための取り付け用部分を有するアーム34を含んでおり、アーム34は車体軸ABと整列するように車両に取り付けられる。車輪支持部材58は、アーム34に対して回転できるようにアームに連結されている。車輪38Aは、車輪支持部材58によって回転可能に支持され、地面の上を転がるように構成されており、車輪38Aと車輪支持部材58は、アームを車両に取り付け、車両を地面の上で駆動させると、車両駆動軸ADと自己整列するように構成されている。標示器は、車体軸ABと車両駆動軸ADの間の角度的なオフセットを表している。
(もっと読む)
生産ライン
【課題】部品搬送ラインの総長さを短くすることができる生産ラインを提供することを課題とする。
【解決手段】(a)に示す比較例では、ワーク搬送コンベア111に沿って口字形状の部品搬送ライン112が設けられ、この部品搬送ライン112の途中に、部品供給センター113が設けられている。空の部品箱114は、図中、L2で示す距離だけ搬送される。加えて、部品搬送ライン112の総長さは大きい。一方、(b)に示す実施例では、ワーク搬送コンベア12に沿って部品搬送ライン16が設けられているが、この部品搬送ライン16の両端に、部品供給センター23、26が設けられている。結果、空のKITボックス15は、図中、L3で示す距離だけ搬送される。このL3は、(a)に示すL2より格段に小さい。そのため、部品搬送ライン16の総長さも小さくなる。
(もっと読む)
作業用補助椅子
【課題】横臥姿勢での作業者の肉体的負担を軽減する作業用補助椅子を提供する。
【解決手段】補助椅子10は、搬送ラインを移動する車体Wに部品を組み立てる際に使用される。補助椅子10は、基台20、フック4、着座部11、補助シート13、及びアシストヒンジ13bを備える。基台20は、床面FLに敷設された軌道に案内されて車体Wの移動方向と略平行に移動できる。フック4は、前記搬送ラインに係止して基台20を車体Wに同期して移動させる。着座部11は、基台20に立設されて作業者Mが着座する。又、着座部11は、車体Wに対して進退できる。補助シート13は、着座部11の側部に配置され、作業者Mが寄り掛ることにより緩衝可能に傾倒する。又、アシストヒンジ13bは、作業者の傾倒動作中の体重を補助する。
(もっと読む)
関節駆動装置、および多関節アーム装置
【課題】作動ロッドに作用する横荷重を受ける構造とすることによって円滑な作動を確保し、さらには、小型化を図り得る、関節駆動装置を提供する。
【解決手段】関節駆動装置10は、対をなす第1と第2のフレーム31、32に回動自在に接続されたアーム部材40と、アーム部材を揺動させるアクチュエータ70と、を含んでいる。アクチュエータは、アーム部材に取り付けられるシリンダチューブ71を備える駆動部Dと、駆動部によってシリンダチューブの軸線方向に沿って移動するシリンダロッド73と、基端部が第1のフレームに回動自在に接続され、シリンダロッドに対して傾斜して伸びるリンク部材80と、シリンダロッドに連結されるとともにリンク部材の先端部が回動自在に接続されたガイド部材90と、を有している。駆動部は、流体圧によってピストン72を移動し、ピストンに取り付けたシリンダロッドを移動させている。
(もっと読む)
作業自動化方法
【課題】人手による作業をロボットによる作業に円滑に移行できる作業自動化方法を提供すること。
【解決手段】作業自動化方法は、ワーク組み立てシステム1に、人手作業エリア30A、30B、ロボット作業エリア40、および緩衝スペース50A、50Bを設け、人手作業エリア30A、30Bでは、ボディ10を連続送りとし、ロボット作業エリア40では、ボディ10をタクト送りとし、人手作業のうち移行対象となるものを抽出する手順と、この移行対象となる人手作業を、人手作業エリア30Bのうち最も緩衝スペース50B側で行う手順と、新たなロボットを緩衝スペース50Bに設置して、ロボット作業エリア40を拡張する手順と、移行対象となる人手作業を新たなロボットの作業に移行する手順と、人手作業エリア30Bのうち最も緩衝スペース50B側のエリアを削減して、人手作業エリア30Bを縮小する手順と、を備える。
(もっと読む)
オートリサイクルシステム
【課題】 使用済み自動車を効率的に分別解体し、再利用可能な回収部品を効率的に回収し、最終処理の段階で排出されるシュレッダーダスト(ASR)発生量の低減を図るオートリサイクルシステムを提供し、コスト削減と環境保護を両立すること。
【解決手段】 使用済み自動車を解体処理するオートリサイクルシステムにおいて、エアコン中のフロンを回収し、エアバッグを電気操作して強制的に爆発膨張させた後、そのエアバッグの生地素材を回収する事前準備工程と、小物部品や部材などの回収部品を取り外して回収すると共に車体に残されたハーネスを分離可能となるように切断する前処理解体工程と、燃料・オイルをドレンコックより回収する燃料・オイル回収工程と、ニブラにより車体を大きく解体するニブラ処理工程と、シュレッダーにより車体を細かく破砕して廃棄物処理をする最終処理工程とを順序だてて行うことを特徴とする。
(もっと読む)
昇降機能付き搬送台車及びそれを用いた自動車組立ライン
【課題】左右のガイドポストを用いて受部材により車体を支持して搬送する昇降機能付き搬送台車において、ドアを取り付けた状態で部品組み付け作業を行っても作業性が高く、ガイドポスト等の重量及びコストの増大を抑制する。
【解決手段】車体AのドアB,Cを全開した状態で、ドアB,Cと干渉しないように、車体Aの前後方向略中央左右両側面から離間させて基台2上に立設した左右一対のガイドポスト3,4、ガイドポスト3,4から左右方向内向きに突出して車体Aの左右両側底部を支持する、ガイドポスト3,4に沿って昇降可能な左右一対の受部材5,6、受部材5,6同士を連結する連結部材7を備え、連結部材7が受部材5,6の下側にあり、受部材5,6と連結部材7とからなる部材の形状が、前後方向から見て略U字状であり、連結部材底部の左右方向に延びる凸条が係合する凹条又は長孔を基台2に形成した。
(もっと読む)
車両組立装置
【課題】部品の個数が異なるタイプの自動車を混合させて生産する際に、小型自動車をより効率よく生産することができる車両組立装置を提供する。
【解決手段】車両組立装置30は、小型自動車10の車体11を搭載した搬送ハンガ43を案内レール41に沿って搬送させる第1搬送機構35を備え、第1搬送機構35で小型車体11を搬送させながら部品の組付けをおこなうものである。搬送ハンガは、単一の状態で小型車体11を2台搭載可能に形成されている。
(もっと読む)
搬送装置
【課題】自動車の組立てラインなどに活用できる搬送装置を提供する。
【解決手段】一定走行経路を走行する搬送用走行体11にその走行方向と平行に前後移動自在な可動体33を設け、この可動体33に、当該可動体33の移動方向と平行な垂直面に沿って上下方向に揺動自在にリンク35aの一端を軸支し、このリンク35aの他端にハンガー13を前後方向に揺動自在に軸支し、リンク35aの中間位置と搬送用走行体11とに両端を揺動自在に軸支したリンク39により、リンク35aのハンガー軸支位置が、当該リンク35aの上下方向の揺動と可動体33の前後移動を伴って垂直に上下移動するように構成された搬送装置において、リンク39の搬送用走行体11側の支軸40の周りで当該リンク39と連動して上下方向に揺動するカム従動ローラー43が設けられ、このカム従動ローラー43を介してリンク39の上下姿勢を規制するカムレール44Aが架設された構成。
(もっと読む)
部品位置決め装置
【課題】部品組付け対象物に部品を位置決めする際に、部品組付け対象物と部品の間に位置ずれが生じることがない部品位置決め装置を提供する。
【解決手段】車体に対して、サイドカーテンエアバッグを位置決めする部品位置決め装置であって、エアバッグをセットするセット治具2と、セット治具2を搬送するアシスト搬送手段4と、アシスト搬送手段4とセット治具2を連結するフローティング機構6を備え、セット治具2には車体の基準孔に位置決めピンを嵌合する位置決め機構5と、車体に対して位置決めピンの挿入方向と略逆方向に押圧する挟持手段31と、エアバッグの特定部位を車体の取付孔に押し込む押込手段32を設けた。フローティング機構6は、エアダンパを膨らませることによりロック状態にし、エアダンパを縮ませることによりフローティング状態にし、それらが切替自在である。
(もっと読む)
部品位置決め方法及びその装置
【課題】作業者が他の作業を兼務することが可能になる部品位置決め方法を提供する。
【解決手段】移動する車体Bに対して、移動自在なセット治具2に把持されるサイドカーテンエアバッグSを位置決めして組付ける部品位置決め方法であって、作業者がアシスト搬送手段を車体Bの移動方向と逆方向に移動させるだけでエアバッグSを車体Bに対する所定位置までパワーアシスト搬送する工程と、セット治具2に設けた引出し・巻取り自在なワイヤの先端の係合部材10を作業者が車体Bの所定箇所に装着する工程と、ワイヤの引出し長さと引出し角度を検出して、車体BとエアバッグSの相対的な位置ずれをなくすようセット治具2を移動させ、セット治具2に設けた位置決めピン7を係合部材10に連結してセット治具2を自動で位置決めする工程と、位置決めされたセット治具2に支持されたエアバッグSを車体Bに自動で組付ける工程を備えた。
(もっと読む)
車種切替用部材自動装着装置
【課題】小さい力で簡単・確実に磁石を切離し得るようにする。
【解決手段】直線的に移動することにより、車種切替用部材12を脱着位置から装着位置へと反転させる切替用部材反転装置21を設けると共に、切替用部材反転装置21に、車種切替用部材12と磁石18との磁気吸着保持状態を解除可能な機械的増力装置38を取付けるようにしている。
(もっと読む)
車室内快適性評価方法、車室内快適性評価装置、及び車室内快適性評価プログラム
【解決課題】高精度に演算された視覚的体積を用いて、高精度に車室内の快適性を評価することができるようにする。
【解決手段】視覚的体積は、乗員の視野に入る空間の体積で定義されており、底面が扇形の柱状空間の体積で定義されている。視覚的体積Vvは、遮蔽物がないと仮定した場合の視覚的体積Vv1から、視野遮蔽物によって視野が遮蔽されて死角となる網掛け部分の底面が扇形の柱状空間の体積の総和Vv2を減算することにより算出される。視覚的体積Vv1は、視野角と等しい中心角θ及び乗員の眼の焦点距離と等しい半径Rの扇形が底面となっている柱状空間の体積で定義されている。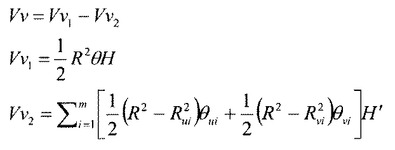 (もっと読む)
(もっと読む)
1 - 20 / 35
[ Back to top ]