
Fターム[3D114EA11]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 固着 (326) | ネジ締め (71)
Fターム[3D114EA11]に分類される特許
21 - 40 / 71
バンパビーム取付け装置及びバンパビーム取付け方法
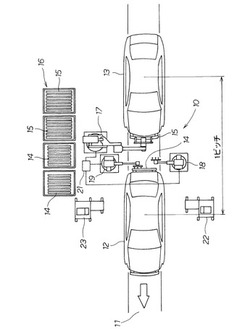
【課題】ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
(もっと読む)
車体へのフードの位置決め方法

【課題】外観部品であるフードが、外観性に影響が出ないように位置決めされる位置決め方法を提供することを課題とする。
【解決手段】車体13側の第1左前点31と第1右前点32の中点42を算出し、また、第1左後点33と第1右後点34の中点43を算出し、車体中心線44を定める。フード12側の第2左前点36と第2右前点37の中点45を算出し、また、第2左後点38と第2右後点39の中点46を算出し、フード中心線47を定める。次に、車体中心線44にフード中心線47が合致するように、フード12を矢印のように移動する。
【効果】中心線同士を合わせるため、フードが車体に対してオフセットして位置決めされる心配はない。結果、外観部品であるフードが、外観性に影響が出ないように位置決めされる。
(もっと読む)
ドア建付け方法及びヒンジ締結構造
【課題】作業者による手作業での建付けに頼ることなく誰にでも簡単且つ短時間でドアを車体に対して建付け可能とする。
【解決手段】ボルト42とナット43が固定されたボルトプレート44をフロントドア7のヒンジ取付け部40の一面40bに設け、ヒンジ取付け部に形成した貫通孔41A、41Bを通して各ボルトを他面40a側へ突出させ、他面側からヒンジ取付け部に貫通する孔部53を通してボルトプレートのナット43にロックボルト45を螺合してボルトプレートをフロントドアに仮止めし、ボルトの先端をボディー1に固定したヒンジ8に設けたボルト取付け孔52に挿入し締結ナット54で締結する。そして、複数の貫通孔のうち1箇所の貫通孔41Aを基準孔とし、それ以外を逃がし孔として、基準孔に貫通するボルト42を中心軸とし、ドアサッシュ部を固定基準としてフロントドアを建付けた後、ロックボルトを本締めしてボルトプレートを固定する。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】ワークの組み付けにかかるコストを低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ20Aをサイドエアバッグ組付部12Aに組み付ける。このワーク組付方法は、そして、まず、ハンド50のピン部材55をピン挿通孔231に挿通して、ハンド50に対するサイドエアバッグ20Aの相関位置を位置決めし、次に、このハンド50でサイドエアバッグ20Aを保持して、サイドエアバッグ組付部12Aに移動し、挿通したピン部材55の先端部分をサイドエアバッグ組付部12Aのピン挿入穴101に挿入して、サイドエアバッグ20Aをサイドエアバッグ組付部12Aに位置決めし、次に、締付装置60A、60Bにより、ねじ61をサイドエアバッグ20Aのねじ挿通孔232に挿通して、サイドエアバッグ組付部12Aのねじ螺合部102に締め付ける。
(もっと読む)
ワーク組付装置およびワーク組付方法
【課題】簡素な構成でワークを被組付部に位置決めできるワーク組付装置を提供すること。
【解決手段】サイドエアバッグ取付装置は、ピン挿通孔が形成されたサイドエアバッグを保持して、ピン挿入穴が形成されたサイドエアバッグ組付部に組み付ける。このサイドエアバッグ取付装置は、ハンド本体51およびこのハンド本体51に設けられた複数のワーク保持装置52を有するハンド50と、ハンド50の姿勢および3次元空間における位置を変化させるロボットアーム41と、これらを制御する制御装置と、を備える。ワーク保持装置52は、筒状のシリンダ53と、このシリンダ53に摺動可能に設けられて、先端がピン形状でありかつ基端側に磁力を有するボス部551が形成されたピン部材55と、ハンド本体51に設けられてシリンダ53をフローティング自在に支持するシリンダ支持部54と、を備える。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】被組付部をセンシングする回数を低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ組付部にサイドエアバッグを配置し、ねじを用いて、このサイドエアバッグをサイドエアバッグ組付部に固定する。このワーク組付方法は、サイドエアバッグ組付部に近接する部分に設けた3つの測定点を撮影する撮影工程と、この撮影した画像に基づいて、測定点の実際の位置A1〜C1を算出する位置算出工程と、この位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、サイドエアバッグとサイドエアバッグ組付部との相関位置を算出して位置決めする第1位置決め工程と、位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、ねじとサイドエアバッグ組付部との相関位置を算出して位置決めする第2位置決め工程と、を備える。
(もっと読む)
部品取付けロボット及び部品取付け装置
【課題】金属粉対策を講じた部品取付け装置を提供することを課題とする。
【解決手段】部品取付け装置10では、部品保持治具16の保持部71の近傍に、ボルト203をねじ込むためにナット199のねじ穴207に向けてエア205を供給するエア噴出し口90と、ナット201のねじ穴に向けてエア206を供給するエア噴出し口100とが設けられている。
【効果】ボルト203のねじ込み前にねじ穴207に金属粉208が付着していた場合であっても、第1エア噴出し口90からエア205を噴出し、金属粉208を除去する。すなわち、本発明によれば、金属粉対策を講じた部品取付け装置10が提供される。
(もっと読む)
バッテリ搭載装置
【課題】 車両の傾斜に係らずバッテリを着脱可能なバッテリ搭載装置を提供すること。
【解決手段】 バッテリを載置して固定するバッテリ固定手段の傾斜状態を調整し、この調整された傾斜状態で車両の下面からバッテリを取り付けることとした。
(もっと読む)
ドア取り外しシステムおよびドア取り外し方法
【課題】ドアをボディから確実に取り外しできるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステムは、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステムは、ドア11を把持して搬送可能な双腕ロボットと、ナットランナ71と、双腕ロボットおよびナットランナ71を制御する制御装置と、を備える。制御装置は、双腕ロボットによりドア11を把持し、ナットランナ71のソケットをボルト12に嵌合して、ナットランナ本体によりソケットを所定回転数だけ回転させ、ソケットの後退距離xを測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。
(もっと読む)
ワーク取付システムおよびワーク取付方法
【課題】汎用性が高くかつサイクルタイムを短縮できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、第1取付ロボット5と、第2取付ロボット6と、これらを制御する制御装置7と、を備える。制御装置7は、第1取付ロボット5のCCDカメラにより、サンルーフ部材3の位置およびインナパネル2Aの位置を位置情報として算出する工程と、この位置情報に基づいて、第1取付ロボット5によりサンルーフ部材3を把持して搬送し、このサンルーフ部材3をインナパネル2Aに位置決めする工程と、第1取付ロボット5によりサンルーフ部材3をインナパネル2Aに仮固定する工程と、既に算出した位置情報に基づいて、第2取付ロボット6によりサンルーフ部材3をインナパネル2Aに本固定する工程と、を実行する。
(もっと読む)
タイヤ組付装置及びタイヤ組付方法
【課題】設備全体の小型化及び省コスト化を実現するタイヤ組付装置及びタイヤ組付方法を提供する。
【解決手段】 ナット30を締め付けるための回転駆動力を伝達する第2作業機構24の回転軸Y1を第1作業機構22の回転軸Y2にオフセットさせることにより、ナット締付部126の配置が異なる複数のナット締付ユニット122a、122bそれぞれのナット締付部126に対して前記回転駆動力を伝達することが可能となる。このため、複数のナット締付ユニット122a、122bにおけるナット30の締付けに要する回転駆動力を、単一の回転駆動力生成部78から供給可能である。従って、設備全体の小型化及び省コスト化を実現することができる。
(もっと読む)
自動タイヤ組付方法及びタイヤ組付装置
【課題】簡単且つコンパクトな構成で、タイヤの自動組付作業を効率的に行うことが可能な自動タイヤ組付方法及びタイヤ組付装置を提供する。
【解決手段】第1作業機構22によりタイヤWの把持及びナット30の締付けを行うと共に、第2作業機構24によりナット30締付け用の回転駆動力を生成し、この回転駆動力を第1作業機構22のナット締付機構52に伝達することによりナット30を締め付ける。このため、単一の作業機構のみによりタイヤWの把持及びナット30の締付けを行う場合に比べ、第1作業機構22及び第2作業機構24を有効に小型化及び簡素化することができる。また、タイヤWの把持及びナット30の締付けを単一の作業機構(第1作業機構22)により行うため、タイヤWとナット30の相対位置が変化し辛くなり、ナット30の締付け位置の特定が容易となる。
(もっと読む)
自動タイヤ組付方法及び自動タイヤ組付装置
【課題】タイヤとフェンダの間のクリアランスが小さい車両でも比較的簡易にタイヤを組み付けることが可能な自動タイヤ組付方法及び自動タイヤ組付装置を提供する。
【解決手段】タイヤ位置決め工程(図14のS6、S16)及びナット締付工程(図14のS8、S18、図15のS37、S46)では、一対の把持アーム62がタイヤWを把持する位置を、タイヤWの上部及び下部に制限する。これにより、タイヤWとフェンダ220の間のクリアランス222が小さい自動車車体16でも比較的簡易にタイヤWを組み付けることができる。
(もっと読む)
組立補助装置、およびこれを用いたナックル組立体とダンパ組立体の組付方法
【課題】ナックル組立体とダンパ組立体との角度を均一化して組み付けることが容易となる組立補助装置、およびこれを用いたナックル組立体とダンパ組立体の組付方法の提供。
【解決手段】ナックル組立体15を載置させる載置台60と、載置台60に載置されたナックル組立体15を載置台60に固定する固定治具61と、載置台60に載置され固定治具61で固定されたナックル組立体15にダンパ組立体16を位置決めする位置決め治具62とを有し、位置決め治具62が、ダンパ組立体16をナックル組立体15に押し付ける弾発部112を備えている。
(もっと読む)
サスペンションアッセンブリ取り付け装置
【課題】設備にかかるコストを低減できるサスペンションアッセンブリ取り付け装置を提供すること。
【解決手段】マウントシステムは、複数機種に共通する締め付け箇所を締め付ける締付ロボットと、複数機種のそれぞれに固有の締め付け箇所を締め付ける固有箇所締付ユニット70Lと、を備え、締付ロボットは、アームと、このアームの先端に取り付けられたナットランナと、を備える。固有箇所締付ユニット70Lは、ナットランナ71と、ナットランナ71をサスペンションアッセンブリに対して進退させる進退機構72と、進退機構72を進退方向と交差する面に沿って移動可能に支持する移動機構73と、を備え、上述の締付ロボットは、この進退機構72を操作することにより、進退機構72を進退方向と交差する面に沿って移動させて、固有の締め付け箇所に固有箇所締付ユニット70Lのナットランナ71を対向させる。
(もっと読む)
ワーク取付システムおよびワーク取付方法
【課題】汎用性が高くかつ小型化できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、サンルーフ部材3を把持して搬送する搬送ロボット4と、ボルトを締め付けるナットランナおよびCCDカメラを有する取付ロボット5と、搬送ロボット4および取付ロボット5を制御する制御装置6と、を備える。制御装置6は、搬送ロボット4を制御して、サンルーフ部材3を把持してボディ2のインナパネル2Aに搬送し、取付ロボット5を制御して、CCDカメラによりサンルーフ部材3のボルト穴およびインナパネル2Aを撮影して、これらボルト穴およびインナパネル2Aの位置を算出し、これら算出した位置に基づいて取付ロボット5の動作を補正して、ナットランナによりサンルーフ部材3の2箇所をインナパネル2Aに固定する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】左右のキャンバ角の差分を極力低減しつつ、サスペンションアッセンブリをボディに取り付けることができるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】アッセンブリ取り付け方法は、ダンパ取付孔13L,13Rの位置BL,BRを測定し、ボディ10の中心位置BCを算出する手順と、サブフレーム基準穴26L,26Rの位置SL,SRを測定し、サスペンションアッセンブリ20の中心位置SCを算出する手順と、中心位置BCと中心位置SCとが一致するように、ボディ10にサスペンションアッセンブリ20を取り付ける手順とを備える。ボディ10にサスペンションアッセンブリ20を取り付ける手順では、サスペンションアッセンブリ20のサブフレーム21をボディ10に固定するとともに、ダンパアッセンブリ24L,24Rの上端側をダンパハウジング12L,12Rに固定する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】車両のボディにサスペンションアッセンブリを高い精度で取り付けることができるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリを車両のボディ10に複数箇所でボルト固定するサスペンションアッセンブリ取り付け方法であって、サスペンションアッセンブリの締め付け箇所のうち、ボディ10の中心軸に対して対称に位置するフロント側左方締付箇所71FL,72FL,73FL及びフロント側右方締付箇所71FR,72FR,73FR、並びに、リア側左方締付箇所71RL,72RL,73RL及びリア側右方締付箇所71RR,72RR,73RRを、一対ずつ締め付ける手順と、サスペンションアッセンブリの締め付け箇所のうち、前記ボディの中心軸に対して非対称に位置するものを締め付ける手順と、を備える。
(もっと読む)
ドア取り外しシステム
【課題】占有スペースを削減でき、かつ、コストを低減して、サイクルタイムを短縮できるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステム1は、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステム1は、ドア11を上下から挟持する双腕ロボット20と、ボルト12を取り外す単腕ロボット30と、これらを制御する制御装置と、を備える。制御装置は、双腕ロボット20の一対のマニピュレータ22A、22Bでドア11を上下から挟持し、この状態で、単腕ロボット30でボルト12を取り外し、その後、双腕ロボット20でドア11を搬送する。
(もっと読む)
車両用インストルメントパネルの取り付け装置及び方法
【課題】インストルメントパネルを車室内に迅速且つ効率的に組み込むことを可能にする。
【解決手段】取り付け装置10は、インストルメントパネル24を把持するインパネ把持手段78を設け、前記インストルメントパネル24を搬送するとともに、前記インストルメントパネル24の重量を保持するアシスト機能を有するアシスト機18と、前記インパネ把持手段78に着脱可能に連結される連結手段80を設け、前記インパネ把持手段78を操作して前記インストルメントパネル24を車室14a内に配置し且つねじ止めする作業ロボット20、22とを備えている。
(もっと読む)
21 - 40 / 71
[ Back to top ]