
Fターム[3D114EA11]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 固着 (326) | ネジ締め (71)
Fターム[3D114EA11]に分類される特許
1 - 20 / 71
車体とパワープラントの結合方法および結合設備
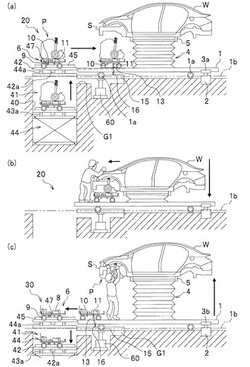
【課題】パワープラントを容易に車体に結合可能な車体とパワープラントの結合方法および結合設備を提供する。
【解決手段】車体Wを昇降自在に載置する昇降装置4を有し、フロアレベルの車体搬送ライン上を移動する搬送台車1と、パワープラントPを載置する載置パレット6と、載置パレット6を搬送台車1に移載する移載手段と、を有し、昇降装置4により車体Wを上昇させた状態で、載置パレット6を移載手段により搬送台車1に移載し、次いで、昇降装置4により車体Wを下降させてパワープラントPの上部取付部と車体側の取付穴とを締結して両者を一体にし、次いで、昇降装置4により車体Wを上昇させてパワープラントPの下部取付部と車体側の取付穴とを締結する。
(もっと読む)
インパネモジュールの車両搭載方法

【課題】インパネモジュールを車室前部に組み付ける作業を容易かつ適正に行い得るようにする。
【解決手段】支持メンバ2の左右両端部に設けられた取付ブラケット6よりも車幅方向内方側部の下面側に形成された位置決め孔部に挿入される上向きのピン部8,9と支持メンバ2の受け座23と車両前後方向に面する被クランプ面部25とを有する搭載治具7を支持メンバ2の左右両側方部に装着する装着工程と、上記搭載治具7の被クランプ面部24を移送手段のクランプ部によりクランプするクランプ工程と、該移送手段により上記インパネモジュールを車室前部に移送して上記取付ブラケット6を車体側壁部に仮預けする仮預け工程と、その後に上記搭載治具を支持メンバから取り外すとともに上記取付ブラケットを締結ボルトにより車体側壁部に対して車幅方向に締結する締結工程とを備えた。
(もっと読む)
パワートレインの組み付け方法および組付補助具
【課題】パワートレインを容易に車体へ組み付けできる、パワートレインの組み付け方法および組付補助具を提供すること。
【解決手段】サイドフレーム4,5間にパワートレイン6を配置し、サイドフレーム上部に防振ゴム9,12を介して取り付けた上側ブラケット10,13の下面部に上面が接合される下側ブラケット11,14をパワートレイン6に取り付け、パワートレイン6を車両1の下方から上方へ移動させて下側ブラケット11,14に固定したボルト15,16を車両1の下方から上側ブラケット10,13の貫通孔に挿入するパワートレイン6の組み付け方法において、ボルト15,16の先端部に車両上下方向へ延びるガイドロッド19,20を着脱可能に取り付け、ガイドロッド19,20によってボルト15,16と貫通孔の位置合わせを行う。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
ナットプレートの位置決め治具
【課題】ナットプレートをドアに固定するにあたり、ナットプレートのドア対する位置決め精度を高める。
【解決手段】2個のナット4,4の内周に挿入した一対のピン31,32をスプリング50(付勢手段)で付勢してナット4,4の内周に押し付ける。これにより、ナット4,4のピッチ方向とピン31,32のピッチ方向とが一致し、ナットプレート5をドア構成部品2に対して精度良く位置決めすることができる。
(もっと読む)
サスペンション調整方法およびサスペンション調整システム
【課題】車体に取り付ける前に行うサスペンションの調整精度を向上できるサスペンション調整システムを提供する。
【解決手段】基準穴S1〜S3の位置を計測し、該計測結果に基づいて、車体21の基準となる位置である基準位置S、車両の進行方向L、車両の幅方向W、および車両の高さ方向Hを規定するとともに、車体21に対して各サスペンション50・60を位置決めする取付基準部P1〜P4の位置を、基準位置Sを基準として、車両の進行方向L、車両の幅方向W、および車両の高さ方向Hに沿って計測する計測装置11と、計測装置11の計測結果より、車両の進行方向L、車両の幅方向W、および車両の高さ方向Hにおける取付基準部P1〜P4の位置ずれ度合いを算出し、該算出結果に基づいて各サスペンション50・60の調整量を設定する伝達装置12と、を具備する。
(もっと読む)
チェッカの角度調整装置及び方法
【課題】ブラケットの角度調整が自動化可能なチェッカの角度調整装置及び方法を提供する。
【解決手段】チェッカ1の角度調整装置10は、ブラケット3を下部に位置させてチェッカ1のアーム2を保持するアーム保持機構20と、保持されたアーム2に対してブラケット3を揺動させて押し上げるブラケット押上機構30と、傾斜ガイド面51aを有するガイド部材51を所定位置に位置させるガイド設定機構50と、ブラケット3を揺動させて押し下げ、傾斜ガイド面51aにブラケット3を当接させるガイド当接機構60とを備える。
(もっと読む)
車体とエンジンの結合方法
【課題】 簡易な構成で速やかにエンジンを車体に組み付けることができる車体とエンジンの結合方法を提供する。
【解決手段】 車体WにエンジンEを取り付ける方法であって、車体Wに取り付けられた左右のエンジンマウント1のエンジン取付ブラケット7とフランジ部材10との間にエンジン取付ブラケット7の姿勢を保持する保持部材12を装着し、次いで車体Wを下降させるかまたはエンジンEを上昇させて、エンジン取付ブラケット7に設けたボルト挿通孔9にエンジンEに植設された左右のスタッドボルト8を挿通させる。ボルト挿通孔9には、スタッドボルト8が挿入される入口側から出口側にかけて先細りのテーパ9aが形成され、スタッドボルト8の先端には、先細りのテーパ8aが形成されている。
(もっと読む)
加工システム及び加工方法
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
テールゲート組み付け調整治具、組み付け方法
【課題】テールゲートを支持した状態で位置決めしながらルーフパネルに組み付ける。
【解決手段】テールゲートを支持する枠体2と、枠体2の下部に配設されテールゲート開口部W1に設けた位置決め穴(W21)に挿入する位置決めピン24と、枠体2の下部に配設され、テールゲートの下部に設けた開口穴部(W4)を規制してテールゲートを位置決めする位置決め部4と、枠体2の上部の両側に配設され車体Wの後部の両側面に形成された当接形状部(W3)に係合させて枠体2を位置決めする位置決め係合部3と、枠体2の上部に配設されルーフパネルRPとテールゲートとを車体Wの前後方向に沿う方向に挟持して中央部を位置決めする第1の位置決め手段5と、ヒンジブラケット8の近傍に位置するように枠体2に配設され、ルーフパネルRPとテールゲートに固定されたヒンジブラケット8を挟持して位置決めする第2の位置決め手段6と、を備えた。
(もっと読む)
組付治具を備える治具装置
【課題】治具装置において、組付対象物に組み付けられる物品の組付位置の設定精度の向上を図り、かつ治具装置の設計の自由度を大きくする。
【解決手段】位置決め部材20,30は、回動中心線L1,L2を中心に回動可能に基台10に設けられ、位置設定部材40,50は、基準点P1(,P2)に対応する基準点対応部位Q1,Q2を有するスケール43,53と、基準点対応部位Q1,Q2に当接するダイヤルゲージ47,57とを備える。基準点対応部位Q1,Q2は、回動中心線L1,L2を中心とすると共に回動中心線L1,L2と基準点P1(,P2)との距離を半径とした仮想円上に位置する。ダイヤルゲージ47,57は、基準点対応部位Q1,Q2に当接した状態で回動中心線L1,L2を中心に回動する位置決め部材20,30の回動位置を変更可能である。
(もっと読む)
車両用懸架装置の組立方法
【課題】複数種のステアリングナックのうちから選択された一つの所望ナックルの組み付けにより車両用懸架装置の組み立て作業を行う場合において、所望ナックルを選択する際の誤選択を確実かつ容易に防止することにより、組み立て作業が容易にできるようにする。
【解決手段】複数種のステアリングナックル15,15´の互いに相違する位置にそれぞれ突起37,37´を形成する。複数種のナックル15,15´のうちから、一つの所望ナックル15を選択し、所望ナックル15を載置台38上に載置して所定位置に位置決めするとき、載置台38に形成された第1嵌入凹部50に、所望ナックル15に形成された突起37が嵌入されるようにする。次に、載置台38から取り出した所望ナックル15を緩衝器18の所定位置に位置決めするとき、緩衝器18に形成された第2嵌入凹部52に、所望ナックル15に形成された突起37が嵌入されるようにする。
(もっと読む)
組付け搬送装置
【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
加工システム及び加工方法
【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
パネル部品、およびパネル部品の製造方法
【課題】鋼板製のインナーパネルと材料種を問わないアウターパネルとを互いに接合して組み立てられるパネル部品の製造手順の簡素化を達成することができ、しかも、そのようなパネル部品の軽量化を図る。
【解決手段】パネル部品としてのフロントドア10は、インナーパネル20とアウターパネル50とを互いに接合する下接合部71と、後接合部72と、前接合部73と、を有する。このフロントドアにあっては、パネル部品組み立て時に下側に位置する接合部は下接合部であり、上側に位置する接合部は後接合部および前接合部である。そして、下接合部には、インナーパネルとアウターパネルとを機械的に接合するための締結部材80を設け、後接合部および前接合部には、インナーパネルとアウターパネルとを接着接合するための接着材90を設けてある。フロントドアの構造は、塗装工程以降に、インナーパネルおよびアウターパネルを組み付け得る構造としてある。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ20を車両のボディ10に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット3の上昇と同期させて、ダンパ25L,25Rを支持するダンパ支持ロボット5L,5Rによりダンパの位置を必要に応じて変更することで、ボディに対するダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、ダンパ支持ロボットによりダンパをボディの所定のダンパ取付孔13L,13Rに位置合わせする位置合わせ工程と、を含む。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】ボディ14の取付ブラケット110は側面に開口するインパネ取付孔111a、111bを備える。インストルメントパネル24は、ボルト150がインパネ取付孔111a、111bを介して挿通される側方固定孔25a、25b及び把持穴26を備える。インストルメントパネルの取付装置10は、インパネ支持アーム72と、インパネ支持アーム72の側面に設けられた基準ターゲット77と、側方から撮像する撮影部100とを有し、画像データ144からインパネ取付孔111a、111b及び基準ターゲット77の位置を、位置データ142における基準位置データと比較し、その比較結果に基づいて、基準ターゲット77が許容ずれ範囲となるようにインパネ支持アーム72を駆動する。
(もっと読む)
受渡し装置
【課題】 ナットを締付装置のソケットに確実に位相合せして挿入するナット受渡し装置を提供する。
【解決手段】 ナット16が供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。このためには、雌テーパ面17の垂直方向に対する角度は14°以下とする。角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を合せることができる。
(もっと読む)
バンパビーム取付け装置及びバンパビーム取付け方法
【課題】ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
(もっと読む)
1 - 20 / 71
[ Back to top ]