
Fターム[3D114EA13]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 固着 (326) | 嵌合、挿入 (27)
Fターム[3D114EA13]に分類される特許
21 - 27 / 27
スプライン嵌合による回転軸体の組み付け方法
【課題】 スプライン嵌合をより容易かつ確実にするスプラインによる回転軸体の組み付け方法を提供する。
【解決手段】 エンジン2の出力軸5、または、出力軸5に対面して進退自在に保持されたトランスミッション4の主軸6を緩速度で回転させながら、第1のエアシリンダ8によってトランスミッション4を前進させ、出力軸5と主軸6とをスプライン嵌合により組み付ける方法であって、トランスミッション4の主軸6の位置を検出する位置センサ10を設け、主軸6が嵌合の成功を示す所定の嵌合位置を通過することなく、トランスミッション4の前進が停止した場合には、第1のエアシリンダ8の推力を切断する推力切断工程と、第1のエアシリンダ8に再び推力を投入して、トランスミッション4を前進させ、スプライン嵌合を試みる再接合工程とを備え、推力切断工程と再接合工程とを所定の回数繰り返すことを特徴とする。
(もっと読む)
車両用配索部品の接続方法および接続装置

【課題】車体側のサイドメンバにフロントエンドモジュールを組み付ける際に、両者間の配管類を比較的簡易な治具を用いて容易に接続することができる方法を提供する。
【解決手段】車体B側のサイドメンバSおよびフロントエンドモジュールMに予めスロット1を有する治具ブロックJ1またはJ2を装着して、それらに配管P1またはP2を把持させておく。サイドメンバSにフロントエンドモジュールMを組み付ける際に、治具ブロックJ1,J2同士を嵌合させ、双方の治具ブロックJ1,J2が把持している配管P1,P2同士を相互に嵌合させて接続する。接続後に治具ブロックJ1,J2を上方に引き抜く。
(もっと読む)
シート部材の組付け方法
【課題】2台のロボットを用いてシート部材の組付けを行うと共に、被組付け物の位置を力覚センサを用いて検出できるようにして、設備費の大幅な削減を図る。
【解決手段】2台のロボットの動作端に取付けた第1と第2の2つの治具11,21によりシート部材2を保持する。両治具11,21を接近させてシート部材2を弛ませた状態で、第1治具11に設けたピン16を被組付け物1の基準孔に押し込み、第1治具11とロボットの動作端との間に介設した力覚センサで検出される位置検出ピンの押し込み反力に基づいて第1治具11の位置を修正し、位置検出ピン16が基準孔に同心で挿入されたときの第1治具11の位置に基づいて被組付け物1の位置を検出する。検出された被組付け物1の位置に基づいて第1と第2の両治具11,21を被組付け物1に対し位置合わせし、被組付け物1にシート部材2を組付ける。
(もっと読む)
車両のボディワークに関する改良されたセンタリング手段を含む自動車モジュールおよび対応するボディワークエレメント
本発明は、モジュールをボディ ワーク(16)に固定するクロス部品(12)と、車両のボディ ワーク(16)に関して垂直なクロス部品(12)上の2つの位置決めピン(22)を含み、そのそれぞれは、車両のボディ ワーク(16)上に設けられた横の遊び(26)を伴う参照穴(26)内に受け入れられるように具体化され、また自動車のシャシ(16)に関するモジュール(10)の横のセンタリング手段を含み、横のセンタリング手段(30)は、横の方向に弾性的に変形可能な2つのエレメント(30)を含み、そのそれぞれは、クロス部品(12)がボディ ワーク(16)上に組み立てられるとき、参照穴(26)の外側の自動車のボディ ワーク(16)の横の面(40)と、固定クロス部品の横の接続面(32)との間で、横に規制される自動車のモジュール(10)に関する。 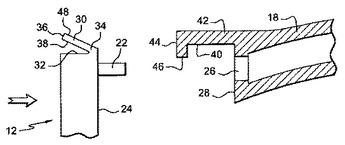 (もっと読む)
(もっと読む)
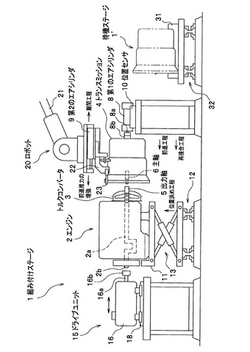
モール装着方法及びその装置
【課題】 自動車用ドアパネルにモールを無理なく簡単に自動的に装着できる装置を提供する。
【解決手段】 モール装着治具10は治具本体11とアーム7との間にモール装着治具10からモールMに加えられる力を検知する力学センサ12が介在し、 治具本体11の一側にはモールMの端部に当接して保持する手段として、フィンガー13が設けられ、また、治具本体11の一面には真空装置につながる吸着パッド15が等間隔で3個取り付けられ、更に、前記吸着パッド15の取り付け面と直交する治具本体11の側面には断面コ字状ブラケット16を一対取り付け、各ブラケット16にモールMをドアパネルに嵌め込む第1ローラ17、第2ローラ18及び第3ローラ19を回転自在に支持している。
(もっと読む)
オープンシール取付方法及び同取付装置
【課題】 車体側の設置のずれやフランジの製造誤差を吸収して、オープンシールをフランジに均一に且つ精度良く取付けることにある。
【解決手段】 自動車のドア取付部開口に設けられたフランジ31にオープンシール13をローラ42で押付け、嵌合させて取付けるオープンシール取付方法であって、オープンシール13をドア取付部開口に設けられたフランジ31に仮装着し、端部に鍔46を設けたローラ42を、フランジ31に沿ってオープンシール13を押付けながら搬送する際に、ローラ42がオープンシール13の背面13dをフランジ31側へ押付ける第1押付け力(Z方向の押付け力)と、ローラ42が鍔46でオープンシール13の車外側の側面13eを押付ける第2押付け力(Y方向の押付け力)とを、全押付け時を通じて一定になるように制御する。
(もっと読む)
部品組付方法及び部品組付装置
【課題】 部品組付方法及び部品組付装置において、部品を人手を介さずに容易に保持し、汎用性を高め、設備のコストを抑え、部品の組付精度を高めることにある。
【解決手段】 ドアにアウタモール13、ドアモール等の長尺部品を組み付ける方法であって、所定の位置に置かれた部品を吸着保持する工程と、部品を吸着保持した状態でドアの所定箇所に搬送する工程と、部品を吸着保持した状態で三次元的に位置決めしながらドアに組み付ける工程と、から構成した。
(もっと読む)
21 - 27 / 27
[ Back to top ]