
Fターム[3D232CC21]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661)
Fターム[3D232CC21]の下位に属するFターム
制御系の作動特性、遅れによる変動防止 (92)
誤判定、誤作動防止(フェイルセーフ) (187)
検出精度の向上(センサ自体の精度の向上を含む) (158)
故障対策(フェイルセイフ) (1,724)
ハンチング防止 (33)
オーバーシュート、アンダーシュートの防止 (27)
電圧変動対策 (115)
経年変化(劣化)対策 (30)
急変化防止 (101)
Fターム[3D232CC21]に分類される特許
1 - 20 / 194
車両用操舵装置
【課題】ラジオノイズの検査や動作確認検査などを効率よく行うことのできる車両用操舵装置を提供する。
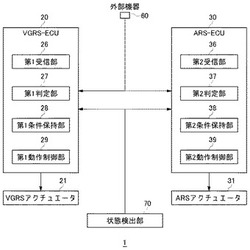
【解決手段】状態検出部70が、車両の状態を検出する。VGRS−ECU20において第1受信部26が外部からコマンドを受信すると、第1判定部27は、車両駆動手段の停止中に、検出される車両状態が、所定の検査モード移行条件を満たしているか判定する。第1動作制御部29は、所定の検査モード移行条件が満たされたことが判定されると、VGRSアクチュエータ21を検査モードで動作可能とさせる。
(もっと読む)
車両の操舵制御装置及び操舵制御方法

【課題】転舵モータの過熱時に操舵輪と転舵輪とを機械的に結合しても、運転者が負担する操舵トルクの増加を抑制することが可能な、車両の操舵制御装置及び操舵制御方法を提供する。
【解決手段】操舵輪32の操作に基づいて転舵輪24を転舵させる転舵モータ2の温度が、予め設定したクラッチ締結温度を超えているか否かを判定し、転舵モータ2の温度がクラッチ締結温度を超えていると判定すると、操舵輪32と転舵輪24との間のトルク伝達経路を機械的に分離する開放状態にあるクラッチ6を、トルク伝達経路を機械的に連結した締結状態に切り換えた後も、操舵輪32の操作に応じた目標転舵角を算出し、この算出した目標転舵角に応じて転舵トルクを制御する転舵モータ2の駆動制御を継続させる。
(もっと読む)
モータ駆動装置、およびこれを用いた電動パワーステアリング装置
【課題】 製造時に電流制限値マップを作成するための工数を少なくし、かつ実使用時に電流制限値を変更可能なモータ駆動装置を提供する。
【解決手段】 スイッチング素子の電流制限値を変更する場合、素子温度Tが時刻t1での素子温度T1から第1目標温度T01まで変化するのに必要な温度到達時間P1、および電流制限値Eが時刻t1での電流制限値E1から第1目標電流制限値E01まで変化するのに必要な電流到達時間P2が算出される(S103)。次に、温度到達時間P1と電流到達時間P2との大小を判定する。(S104)温度到達時間P1が電流到達時間P2以下の場合、スイッチング素子の電流制限値を変更する。(S105)これにより、モータ駆動装置の製造時に電流制限値マップを作成することなく、時刻t1での素子温度T1に基づいて、スイッチング素子の状態に応じた電流制限値に変更することができる。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
操舵トルク検出装置、操舵トルク検出方法及び電動パワーステアリング装置
【課題】トルクセンサを用いずに操舵トルクを検出することができる操舵トルク検出装置及び操舵トルク検出方法、並びにトルクセンサを複数設けることなく2重系を構築することができる電動パワーステアリング装置を提供する。
【解決手段】モータ回転角センサ13の検出信号S1の周期と操舵角センサ18の検出信号S2との周期をそれぞれカウントし、それぞれの絶対角度を算出する。そして、これらの絶対角度の相対角度から操舵トルクT0を算出する。算出した操舵トルクT0とトルク検出値Tiとを比較することで、トルクセンサ3の異常を検出し、トルクセンサ3の正常時にはトルク検出値Tiを用いて操舵補助制御を行い、トルクセンサ3の異常発生時には、トルク検出値Tiに代えて操舵トルクT0を用いて操舵補助制御を行う。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
車両の操舵制御装置
【課題】 トルクセンサを構成する複数のセンサの異常をそれぞれ正確に判別し、正常なセンサによる検出値を用いてアシストトルクを付与する車両の操舵制御装置を提供すること。
【解決手段】 電子制御ユニット28は、2つの磁気センサ24A,24Bのいずれかに異常が発生し、トルクセンサ20全体として異常が発生しているときには異常の発生している磁気センサを特定する。すなわち、ユニット28は、センサ24A,24Bからそれぞれ磁束密度の変化に起因して検出される回転トルクT1,T2を出力させるためにEPSモータ13を駆動させて出力側シャフト12a2に付与する回転トルクを変動させる。そして、ユニット28は、出力されたトルクT1,T2と判定トルクTrefとを比較して異常の発生している磁気センサを特定し、正常な磁気センサが検出した回転トルクを用いてアシストトルクを付与する。
(もっと読む)
ステアバイワイヤ式のステアリング装置
【課題】減速旋回中において、減速旋回中に車両に作用する遠心力が一定になるように操舵輪の操舵角の制御を行う。
【解決手段】ステアバイワイヤ式のステアリング装置は、ハンドル20の旋回角φを検出する旋回角検出センサ32と、操舵輪30の操舵角θを検出する操舵角センサ32と、操舵輪30を駆動する操舵駆動装置3と、操舵駆動装置3を制御する制御装置4とを備え、ハンドル20の旋回に応じて操舵輪30を操舵方向に駆動する。ステアリング装置は、車両の速度Vが旋回角φに応じて設定された制限速度より大きいときに、車両の速度Vを制限速度まで減速する減速手段を備える。そして、この減速手段により減速旋回しているときに、車両に作用する遠心力が一定となるように操舵角θをハンドル20の旋回角φに応じた所定角度まで大きくする。
(もっと読む)
電動パワーステアリング装置
【課題】過熱保護の演算に誤りを検出可能な、信頼性の高いが電動パワーステアリング装置を提供する。
【解決手段】モータに流れる電流値を制限する過熱保護電流値を演算する過熱保護電流値演算ユニット132と、前記演算された過熱保護電流値に基づいて前記モータに流れる電流値を制限し、前記モータに流れる電流値による発熱を抑制して車載機器を保護する過熱保護制御ユニットとを備え、前記演算された過熱保護制限電流値に関連する情報を記憶し、今回演算した過熱保護電流値と前記記憶されている過熱保護電流値に関連する情報との比較に基づいて、前記今回の演算による過熱保護電流値の異常の有無を判定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】新たに設定されるモータ抵抗と実際のモータの抵抗との乖離を小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータを備え、このモータの抵抗を示す値であるモータRm抵抗を更新する。具体的には、モータの誘起電圧EXが第1判定値GAよりも小さいことに基づいて、モータ抵抗Rmを更新する。また、誘起電圧EXが第2判定値GBよりも小さいとき、モータ電圧Vmをモータ電流Imにより除算した値である除算値を新たなモータ抵抗Rmとして設定する。
(もっと読む)
後側方操舵支援技術
【課題】舵角比を可変に変更可能な機構を備えた車両において、運転者に違和感を生じさせることなく、周辺の物体に対する衝突リスクを確実に下げる。
【解決手段】車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度、車両が物体に到達するまでの余裕時間を推定する。車両には、該車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段が備えられている。該舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、舵角比を小さくする。これにより、舵角比を可変に変更可能な車両において、車両の物体に対するリスクを確実に低減させる。
(もっと読む)
後側方操舵支援技術
【課題】車両周辺の物体について、運転者に気付かせる役割を果たす警報と、回避のために運転者の運転操作を支援するための操作支援とを、運転者に違和感を生じさせないようシームレスに組み合わせる。
【解決手段】後側方など車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度を算出し、車両が物体に到達するまでの余裕時間を算出する。車両には、制御信号をステアリングアクチュエータに印加して操舵を補助する手段が備えられ、上記の距離、相対速度、余裕時間の少なくとも1つに応じて、パルス状の信号を生成し、該パルス状の信号を前記制御信号に重畳して、該重畳された制御信号が、前記ステアリングアクチュエータに印加されるようにする。相対速度が大きくなるほどパルスの周波数を高く、そして、前記距離または余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるように該信号を生成する。
(もっと読む)
操舵装置
【課題】 不揮発性メモリに推定温度データを書き込むことができなかった場合でも、過熱防止機能を維持しつつ、電動モータによる操舵機能が十分得られるようにする。
【解決手段】 マイコンは、EEPROMのデータが異常である場合には、予め高温設定された仮基板温度Tbmaxから温度センサにより検出された基板温度Tbを減算した基板温度変化値ΔT(Tbmax−Tb)を使って、モータ推定温度を計算するための各仮温度値SUM1max,SUM2max,SUM3maxを補正する(S61,S62)。従って、基板温度Tbに応じた初期値SUM1(n-1),SUM2(n-1),SUM3(n-1)を設定することができる。この場合、温度センサが異常である場合には、基板温度変化値ΔT(Tbmax−Tb)を使った補正を行わない(S63)。
(もっと読む)
車線逸脱防止装置
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】ドライバの回避操作に対応する制御介入により車両の安定性が損なわれるといった事態を抑制する。
【解決手段】車両CのリスクポテンシャルRPが第1のリスクポテンシャルRf1を超えることにより、ラップ率ヨーモーメントγrに基づいて車両Cに目標ヨーモーメントγfが付与される。また、車両CのリスクポテンシャルRPが第2のリスクポテンシャルRf2を超えることにより、舵角ヨーモーメントγsに基づいて車両Cに目標ヨーモーメントγfが付与される。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】ロータ回転角の推定で戻し処理が行われるがロータが反転しない場合や停止する場合等にもロータ回転角を正確に推定できるモータ制御装置を提供する。
【解決手段】ロータ回転角の離散的な検出結果とそれから得られる角速度推定値ωeとトルク情報とに基づき次のように回転角推定値θreを求める。電動パワーステアリング装置にてモータのロータ回転角の次の検出前に回転角推定値θreが検出予定回転角θnxに達すると、直前検出時点tn-1及び検出予定回転角到達時点tnの操舵トルクτ(n-1),τ(n)と角速度推定値ωeとに基づき回転方向の反転/非反転を推定する。その後、回転角推定値θreが検出済回転角θrに向かうものとし、上記推定結果が非反転の場合にはΔτ(n)=|τ(n)−τ(n-1)|に比例した角度量Δθだけ変化した時点tn+1以降で、反転の場合には30度(検出間隔の1/2)だけ変化した時点tn+1以降で、回転角推定値θreを一定に維持する。
(もっと読む)
自動操舵機能を備えた電動パワーステアリング装置
【課題】自動操舵されるステアリングホイール位置を運転者の意図と合わせ、車両を始動時の安全性を確保し、車両を安全に駐車させることができる電動パワーステアリング装置を提供する。
【解決手段】運転席に設置された据え切り切替スイッチによるステアリングホイール位置情報を、電動パワーステアリング装置のコントローラに取り込み、車両停止状態、非操舵状態を判定し、据え切り切替スイッチで設定されたステアリングホイール位置に自動的に作動させる。
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、モータ制御信号出力手段として、独立した二つのマイコン17a,17bを備えるとともに、該各マイコン17a,17bは、同一の電流フィードバック演算を実行する。そして、駆動回路18を構成する各スイッチングアーム20a,20bは、その対応するマイコン17a,17bが出力するモータ制御信号に基づいて、それぞれが独立して作動する。また、各マイコン17a,17bは、電流指令値と実電流I(I1、I2)との電流偏差(の絶対値)が所定の閾値を超えるか否かを判定する。そして、その電流偏差が閾値を超える場合には、システムに何らかの異常が発生したものと判定する。
(もっと読む)
1 - 20 / 194
[ Back to top ]