
Fターム[3D232DA01]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167)
Fターム[3D232DA01]の下位に属するFターム
前輪舵角 (3,968)
後輪舵角(角速度、角加速度を含む) (162)
前輪舵角速度 (667)
前輪舵角加速度 (87)
操舵トルク (2,841)
ステアリング伝達比 (201)
前後輪舵角比 (8)
内輪差
中立位置 (94)
ハンドルの切り戻し (101)
Fターム[3D232DA01]に分類される特許
1 - 20 / 38
自動車
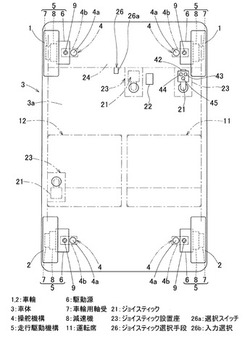
【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
電動パワーステアリング装置

【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
車両用ステアリング装置
【課題】車両用ステア・バイ・ワイヤ式ステアリング装置において、ステアリングホイールの操舵角を容易に且つ確実に制限すること。
【解決手段】ステアリングホイール21に対して、転舵機構30を機械的に分離するとともに電気的には接続した車両用ステアリング装置10であり、ステアリングホイールに連結された第1回転軸41と、転舵機構に連結された第2回転軸42と、これら第1・第2回転軸同士を一定の相対的な回転角の範囲で互いに空転可能に連結する連結機構43とを有している。
(もっと読む)
ステアリング制御装置及びステアリング制御方法
【課題】ステアリング操作初期の応答性の向上と、ステアリング操作後期のヨーレイトによる車両の巻き込み現象の回避との両立を図る。
【解決手段】ステアリングホイール1の操舵速度θ′に対する操向輪7の転舵速度の比である速度比について、ステアリング操作初期の速度比をステアリング操作後期の速度比よりも大きな値に制御する。ステアリング操作初期の速度比は、ステアリングホイール1の操舵速度θ′の絶対値に比例した値で補正して、ステアリング操作後期の速度比は、ステアリングホイール1の操舵加速度θ″の絶対値に比例した値で補正する。
(もっと読む)
車両用操舵装置
【課題】構造が簡単で安価に操舵軸の絶対位置を検出することができる車両用操舵装置を提供する。
【解決手段】転舵軸5をそれぞれ対応する第1および第2のボールねじ機構6,7を介して駆動する第1および第2の転舵モータ11,12を備える。第1および第2の転舵モータ11,12の回転角をそれぞれ検出する第1および第2のレゾルバ21,22の検出結果を参照して、転舵軸5の軸方向X1の絶対位置を求める。第1および第2のレゾルバ21,22の電気角1回転当たりの転舵軸5の移動量を互いに異ならせてある。
(もっと読む)
車両用操舵制御装置及び方法
【課題】 自動転舵制御時、ドライバにハンドルの拘束感を与えることなく操舵角と車両挙動との不一致を回避できる車両用操舵制御装置及び方法を提供する。
【解決手段】 操舵コントローラ10は、自動転舵制御時、自動転舵時の目標転舵角に応じて設定された操舵角を、反力が0となる操舵角とし、該反力が0となる操舵角と実操舵角との偏差に基づいて操舵反力を制御する。
(もっと読む)
動力車
【課題】操作者の操縦操作に応じて推進及び操舵を行うものにおける障害物との衝突を停止することなく回避する。
【解決手段】人が操作指示を行うための操作入力部4と該操作入力部に加えられた操作指示を検出する指示検出部Cと、加えられた指示に応じて操舵や推進のための動力を制御する制御手段CPUと、障害物を検出する障害物検知センサー5とを備える。また、障害物検知センサーによる障害物の検知出力に基づいて旋回動作中に車両に対して横移動の力を付加する衝突回避手段を備えている。停止することなく障害物を回避することができる。
(もっと読む)
すれ違い自動走行制御装置及び運転支援システム
【課題】 対向車とのすれ違いの際の運転者の負担を軽減させることができるすれ違い自動走行制御装置を提供する。
【解決手段】 自車40では、GPS車載器22aで取得された自車40の現在位置、受信機10aを介して入力された対向車50の現在位置、受信機10aを介して対向車50が停止・前進・後進するのかを示す走行状況情報、側面カメラ16aで取得した画像から画像処理によって得られる道路の側端部と自車40の道路側端部側の車体側面との距離(脱輪情報)及びクリアランスソナー18aによって得られる自車40の車体側面とその車体側面と同じ側にある物体との距離(接触情報)によって自動走行がなされる。また、自車40が走行する際には、対向車50へ自車40の走行状況情報を送信機20aを介して送信する。このように、自車40と対向車50とで走行状況情報を送受信しつつ自動走行させ、運転者が運転することなくすれ違いを可能にする。
(もっと読む)
電動パワーステアリング装置
【課題】端当て状態で操舵系にかかる負荷を低減させることが可能な電動パワーステアリング装置を提供する。
【解決手段】本発明に係る電動パワーステアリング装置11では、端当て状態になったか否かを端当て判定部53が判別しており、端当て状態になった際には、モータ駆動電流Iu,Iv,Iwを生成するための駆動制御部42に付与するq軸電流指令値Iq1*を、端当て状態と判定される直前のq軸電流検出値Iq2の値にホールドする。これにより、モータ12による補助力を端当て状態の操舵抵抗Tfに対して最低限必要な大きさに抑えることができ、操舵系にかかる負荷を従来より低減させることが可能になる。
(もっと読む)
屈曲式の建設車両
【課題】一般車道での走行に好適で、現場での作業にも適したステアリング操作が行える屈曲式の建設車両を提供する。
【解決手段】屈曲可能な自走車体1と自走車体屈曲用の車体屈曲用油圧シリンダ2と車体屈曲用油圧シリンダ2への圧油の流れを制御するパイロット式方向切換弁5とハンドル7Aの回転操作により方向切換弁7の信号受け部にパイロット信号を出力して同切換弁5を切り換えるハンドル用操作装置6とを備えた屈曲式の建設車両において、レバー11Aの傾動操作により電気信号を出力する電気レバー用操作装置10と同操作装置10の電気信号が入力されレバー11Aの操作に係る電気信号を出力するコントローラ11と、この電気信号をパイロット信号に変換して方向切換弁5の信号受け部に出力し同切換弁5を切り換える信号変換手段と、ハンドル7Aの回転操作とレバー11Aの傾動操作による方向切換弁5の操作を選択的に行えるようにした操作方式の選択手段とを設けた。
(もっと読む)
ステアリング装置の路面反力検知システム
【課題】 簡単な構成で走行中に車輪が受ける路面反力を検出できるステアリング装置の路面反力検知システムを提供する。
【解決手段】 車体フレーム11に固定された弾性変形可能なハウジング固定部18に出力軸ハウジング12を固定する。ラック軸13の先は車輪を転向操作する舵取機構のナックルアームに繋がる。車輪からラック軸13の軸線方向に沿った矢印a方向の路面反力が作用すると出力軸ハウジング固定部18が矢印a方向に弾性変形し、路面反力の大きさに比例して撓む。出力軸ハウジング固定部18の変位検出部30Aの移動子は固定子に対して相対移動し、固定子の永久磁石から移動子の強磁性体を通過する磁束が変化する。この変化を磁束測定子で検出して路面反力を求める。この他、検出された路面反力の方向とトルク指令値に基づいて路面反力の大きさを推定し、路面反力を検知することもできる。
(もっと読む)
車両用操舵制御装置
【課題】 高性能なパワーステアリングシステム等を搭載することなく操舵トルクの変動を抑制可能な車両用操舵制御装置を提供すること。
【解決手段】 運転者の操作するステアリングホイールに接続された第1シャフトと、該第1シャフトに自在継ぎ手を介して接続された中間シャフトと、該中間シャフトに自在継ぎ手を介して接続され操向輪を転舵する第2シャフトと、前記中間シャフト上に設けられ、前記第1シャフトの回転角(θ)に対する前記第2シャフトの回転角(δ)の比を表す伝達比(θ/δ)を走行状態に応じて制御することでステアリングギヤ比を変更するステアリングギヤ比変更手段と、を備えた車両用操舵制御装置において、前記ステアリングギヤ比変更手段は、低車速領域から第1車速までは前記伝達比が所定伝達比に向かって小さくなるように設定し、前記第1車速以上の第2車速よりも高車速領域では前記伝達比が前記所定伝達比よりも大きくなるように設定した。
(もっと読む)
車両盗難防止装置
【課題】ユーザの操作を煩雑にすることなく車両の盗難を正確に検出することを可能にする車両盗難防止装置を提供すること。
【解決手段】本発明に係る車両盗難防止装置1は、車両の水平面に対する傾斜角を検出する傾斜角検出手段2を備え、傾斜角検出手段2により検出された傾斜角に基づいて車両の盗難の有無を判断するものであって、パワーステアリング装置3と、パワーステアリング装置3を制御する制御手段5とを備えるとともに、傾斜角検出手段2の検出した傾斜角が所定角度以上である場合に制御手段5がパワーステアリング装置3にアシスト力を発生させることを特徴とする。
(もっと読む)
車両の操作装置
【課題】複数輪を独立して操舵可能な車両において、4輪を独立して操舵する独立操舵走行の操作を容易にする。
【解決手段】モード選択スイッチ21が配置されたケーシング20、ステージ30、ステージ30上に配設されステージ30に対して回転及び固定可能に配設される操作部40を備える。操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。信地回転の場合、操作部40で回転中心を指定し、指定した回転中心を中心として回転可能に構成される。平行移動の操作の場合、水平面上の前後、左右、斜めの方向に移動可能に構成される。操作部40の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
(もっと読む)
車両及び車両用操作装置
【課題】他車両に取って予想外の動きをする機会をより少なくする。
【解決手段】予め決められた条件を満たす場合に、独立操舵走行が可能な構成とする。予め決められた条件としては、所定車速v5(例えば、10km/h)以下であって、車両の現在位置が許可領域内であることである。ここで、許可領域とは、駐車場内、周囲に駐車スペースがある場所、路上に設けられたパーキングメータのある駐車スペース、又は自宅等の駐車エリアで指定済みの場所である。なお、車速の条件は省略可能であり、駐車場等の所定場所にいる場合に条件を満たすこととしてもよい。
(もっと読む)
操舵反力制御装置
【課題】 バネ23g1,23g2により操舵反力を付与する機械的反力トルク付与部23と、目標反力トルクに対するバネ反力トルクの過不足分を補償する反力用モータ21とを備えた操舵反力制御装置において、反力用モータ21の消費電力を低減する。
【解決手段】 反力用モータ21と機械的反力トルク付与部23との間の操舵入力軸12にクラッチ部22を設ける。車両状態に応じて演算される目標反力トルクT*が、バネ反力トルクTsprの略半分より小さい場合には、クラッチ部22を非連結状態にしてバネ反力トルクが操舵ハンドル11に伝達されないようにして、反力用モータ21のみにより操舵反力トルクを操舵ハンドル11に付与する。
(もっと読む)
1 - 20 / 38
[ Back to top ]