
Fターム[3D232DA02]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角 (3,968)
Fターム[3D232DA02]の下位に属するFターム
Fターム[3D232DA02]に分類される特許
1 - 20 / 61
操舵装置
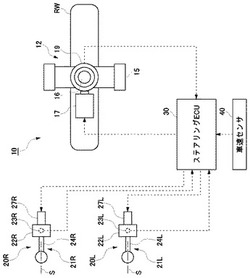
【課題】車速センサがフェールした場合であっても、操作性および操縦安定性の低下を抑制する。
【解決手段】操舵装置10は、右側操舵入力部20Rと、左側操舵入力部20Lと、車速センサ40と、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に応じて操舵輪RWを転舵する転舵機構12と、ステアリングECU30により検出された車速に基づいて、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に対する操舵輪の転舵角の比である舵角比を設定するステアリングECU30とを備える。ステアリングECU30は、車速センサ40がフェールした場合、右側操舵入力部20Rの操舵角に対する操舵輪RWの転舵角の比である第1舵角比と、左側操舵入力部20Lの操舵角に対する操舵輪RWの転舵角の比である第2舵角比とを異なる値に設定する。
(もっと読む)
インホイールシステムを用いた車両制御方法

【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
インホイールシステムを利用した車線維持補助システム
【課題】 インホイールシステムを利用した車線維持補助システムを提供する。
【解決手段】 車両走行中の車線離脱危険度を判断する段階、車線維持補助のための必要ヨーレートを演算する段階、前記演算された必要ヨーレートと実際ヨーレートとの差による要求ヨーレートを算出する段階、前記要求ヨーレートを実現するためのトルクベクタリング駆動力配分量を演算する段階を含むインホイールシステムを利用した車線維持補助システムであり、車線離脱の危険がある場合、操向トルクを用いないので運転手に違和感を与えず、後輪駆動力の変化を利用することによって違和感を最小にすることを特徴とする。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】消費電力を節減しながら必要なタイミングで作動してシャフトの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、外部から間欠的に供給される電力により作動するとともに、ステアリングシャフト2の回転角速度に応じて作動時間が変化するように構成される。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために作動する制御対象の制御量を演算し、演算した制御量に基づいて制御対象を制御する。また、車両のドライバの操舵操作量に基づいて制御対象の制御を停止するか否かを判断する。制御対象の制御を停止すると判断したときに、そのときから制御対象の制御量が縮退するように縮退制御量を決定する。制御対象の制御を停止すると判断したときに、決定した縮退制御量に基づいて制御対象の制御量を制御する。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、操舵補助力を利用して操舵輪を転舵し車両を目標軌跡に沿って走行させる。
【解決手段】操舵補助力発生装置14を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算し(S400)、操舵輪の舵角が目標舵角になるよう操舵補助力を制御する(S600)。特に操舵補助力の目標値は運転者の操舵負担を軽減するための操舵補助力と、操舵輪の舵角が目標舵角になるよう操舵輪を転舵するための操舵補助力との和に設定される(S600)。
(もっと読む)
電動パワーステアリング装置
【課題】エンド当ての衝撃を十分に緩和するとともに、十分なアシスト力を付与することができる電動パワーステアリング装置を提供する。
【解決手段】マイコン41は、操舵角θsがそのステアリングエンド近傍の所定操舵角以上である場合に、該操舵角θsの増大に応じて制限角速度が小さくなるように該制限角速度を演算する操舵角速度制限部61を備えた。そして、操舵角速度制限部61は、操舵角速度ωsが制限角速度よりも大きいときに、モータ回転角速度ωmを抑制すべく、q軸電圧指令値Vq*を補正するようにした。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両用操舵装置
【課題】省エネルギを図ることのできる車両用操舵装置を提供する。
【解決手段】荷役用油圧アクチュエータとしてのリフトシリンダ31へ作動油を給排するための第1の油圧回路68と、操舵反力用油圧アクチュエータとしての油圧シリンダ13へ作動油を給排するための第2の油圧回路84とで、油圧源としての油圧ポンプ8、主供給路63の部分82、主排出路65の部分83および油タンク64を共用する。リフトシリンダ31が非作動状態にあるときに、切替弁としての操舵反力用制御弁57を切り替え、操舵反力用油圧アクチュエータとしての油圧シリンダ13を働かせる。荷役動作に支障をきたすようなことがない。
(もっと読む)
車両の後輪操舵制御装置
【課題】車両に備えられたアクティブフロントステア装置が旋回中に旋回方向と逆方向に前輪を操舵するときに車両を安定走行させるように後輪を操舵する制御装置を提供する。
【解決手段】本発明は、ヨーレートを含む車両の運動状態量を検出する状態量検出手段13〜16,19と、検出された運動状態量に基づき指示トー角θTDを算出し、指示トー角に応じてアクチュエータの駆動により車両の左右後輪のトー角を変化させる後輪トー角制御手段120と、を備え、アクティブフロントステア装置18は、運転者の操舵量に基づく基本前輪舵角14と車両の運動状態量に基づく目標前輪舵角19とが一致しない場合、カウンタステア制御を行うとともに、カウンタステア信号を前記後輪トー角制御手段に出力し、後輪トー角制御手段は、カウンタステアが入力された場合、ヨーレートのゲインを増幅k1させるとともに、指示トー角の設定ゲインを減少k2させるように構成する。
(もっと読む)
操舵制御装置及びプログラム
【課題】正確に目標コースを追従することができるようにする。
【解決手段】目標到達点偏角検出手段26によって、車両の進行方向と、車両の走行する目標コース上の予め定められた前方注視時間後の目標到達点の方向との偏角を検出する。ヨー角速度目標値演算手段28によって、目標到達点偏角検出手段26によって検出された偏角に比例するヨー角速度を、予め定められたむだ時間後の目標値として演算する。操舵制御手段30によって、演算されたヨー角速度の目標値をむだ時間後に実現するように、車両の前輪の操舵を制御する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されないステアリングホイールと、操舵角センサと、操舵反力モータと、転舵モータおよび操舵反力モータを制御するステアリング制御部とを備える。転舵モータ6から操舵軸10に動力を伝達して転舵を行なわせる転舵動力伝達機構18のほか、トー角調整用モータ7から操舵軸10に動力を伝達してトー角調整を行なわせるトー角調整動力伝達機構28を設ける。転舵モータ6が失陥したとき、転舵モータ6の転舵動力伝達機構18からの切り離し、トー角調整動力伝達機構28の固定、トー角調整用モータ7による転舵を行なわせる切換手段17を、転舵動力伝達機構18およびトー角調整動力伝達機構28の途中部分に設ける。
(もっと読む)
電動パワーステアリング装置
【課題】軸長を短縮することができる電動パワーステアリング装置を提供すること。
【解決手段】電動パワーステアリング装置1は、同軸上に相対回転可能に連結された第2および第3のシャフト12,13と、トルクセンサ44と、操舵補助用のモータと、モータの動力を第3のシャフト13に伝達する減速機構26とを備えている。減速機構26は、モータにより駆動されるウォーム軸27と、ウォーム軸27に噛み合い、第3のシャフト13の外周に同行回転可能に連結された環状のウォームホイール28とを含み、トルクセンサ44は、ウォームホイール28の径方向R内方に配置された内方配置部94を含み、内方配置部94は、ウォームホイール28の一部である筒状突起71の内径部71bに同行回転可能に連結された連結部を含む。
(もっと読む)
自動操舵制御装置
【課題】電圧飽和が発生し電流追従誤差が大きくなることを防止する。
【解決手段】転舵輪を転舵するモータ5と、前記モータの電流を検出する電流センサ9と、前記転舵輪の目標舵角の演算または外部からの受信に基づいて目標舵角を設定する目標舵角演算器11と、前記転舵輪の転舵角を検出する角度センサ7と、前記転舵角が前記目標舵角に追従するように前記モータの目標電流を演算してモータを制御する制御ユニット10と備え、前記制御ユニット10は、前記電流センサ9により検出されるモータ電流に基づいてモータ回転速度制限値を設定して前記モータの回転速度を制限する転舵角が目標舵角に追従するようにモータを制御する。
(もっと読む)
車両の挙動制御装置
【課題】目標車両モデルの型式に拘わらずに適用でき、且つフィードバック制御や車体スリップ角の推定を行わずに、フィードフォワード制御により所望の車両挙動を得ることのできる車両の挙動制御装置を提供する。
【解決手段】車両の挙動制御装置1において、前輪舵角δfを検出する操舵角センサ3と、車速Vを検出する車速センサ2と、後輪の転舵に供される後輪転舵装置4と、前輪舵角δfと車速Vとに基づき、目標前輪タイヤ横力Yftおよび目標後輪タイヤ横力Yrtを設定する目標タイヤ横力設定部を備えた目標車両モデル設定部13と、目標前輪タイヤ横力Yftと目標後輪タイヤ横力Yrtとに基づき、後輪転舵装置4に転舵させる目標後輪舵角δrtを設定する後輪転舵量設定部14とを備えるように構成する。
(もっと読む)
車両用の運転ダイナミクスコントロールシステム
この発明は、車両用の運転ダイナミクスコントロールシステムに関し、一方では目標値仕様を、そして他方では、運転状態変数を、入力データとして与えられる少なくとも1つの運転ダイナミクスコントローラを有し、また ドライバーと無関係に調整可能な車両の前および/または後車軸におけるステアリングのように、車両の原動力をコントロールし、規定し、また変更することができる複数のアクチュエータを有する。
ドライバーと無関係に調整可能なシャシ、ドライバーと無関係に調整可能なブレーキ、およびドライバーと無関係に調整可能な運転列を有し、運転ダイナミクスコントローラは、目標値仕様および運転状態変数から中央コントロール仕様を決定し、さらにアクチュエータを駆動するために操作変数内にコントロール仕様を分配する分配アルゴリズムにそれを供給する。
アクチュエータ(1、、m)の操作変数(u)に対するコントロール仕様(ν)の最適分配を提供するために、それは、現在のコントロール可能性、アクチュエータ(1、、m)の現在のアクチュエーティング速度、およびコントロール仕様(ν)の実行に対するそれらの可能性ある貢献を考慮するために操作変数(u)を生成する場合に、分配アルゴリズム(C)が、アクチュエータ(1、、m)の状態を与えられるという、この発明によって提供される。
(もっと読む)
車両運動制御システム
【課題】既存の車両制御装置に対して大幅な変更を加えることなく、しかも互いの干渉を抑制して協調した動作を実現することのできる車両運動制御システムを提供する。
【解決手段】車両の挙動を制御する複数の車両制御装置としてのVSA及びRTCと、これらと通信線を介して接続される集中制御装置としての協調制御部17とを有し、VSA及びRTCと協調制御部はそれぞれ、規範ヨーレートを算出する規範ヨーレート算出部10,15,18を備えており、協調制御部が正常であるときは、VSA及びRTCの各々が、協調制御部から取得した規範ヨーレートに基づいて制御を行い、協調制御部が異常であるときは、VSA及びRTCの各々が、自装置内で算出された規範ヨーレートに基づいて制御を行うものとする。
(もっと読む)
1 - 20 / 61
[ Back to top ]