
Fターム[3D232DA08]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角速度 (667)
Fターム[3D232DA08]の下位に属するFターム
Fターム[3D232DA08]に分類される特許
1 - 17 / 17
電動パワーステアリング装置
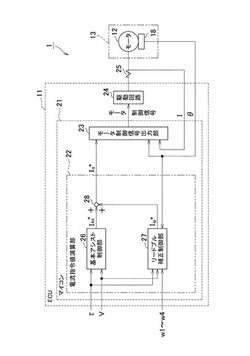
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
走行制御装置および車両

【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
電動パワーステアリング装置
【課題】操舵フィーリングを向上させることができる電動パワーステアリング装置を提供することを課題とする。
【解決手段】基本アシスト指令値決定手段201にフリクションを補償するためのフリクション補償値を決定するフリクション補償値決定手段220と、ステアリングホイール2の操舵角を検出する操舵角検出手段37と、操舵角検出手段37からの信号に基づきステアリングホイール2の回転速度を算出する舵角速度算出手段240を有し、往き状態時と戻り状態時のフリクション補償値決定手段220からのフリクション補償値を操舵角が大きくなるに従って大きくしたことを特徴とする。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】前記車両挙動センサの検出値に応じて行う制御の補正において、運転者に違和感を与えない電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置のEPS_ECU20の基本制御部51は、操舵トルクTrqにもとづいてアシスト電流Iaを算出する。ヨーレート反力補正電流演算部65はヨーレートγ*にもとづいて、操舵補助力の操舵反力成分の制御のためのヨーレート反力補正電流Iyを算出する。そして、ヨーレート反力制限部66は、中点学習時のヨーレートセンサ温度TY*と、現在のヨーレートセンサ温度TYとの差に応じて、ヨーレート反力補正電流Iyを調節して補正されたヨーレート反力補正電流Iy*を減算器53に出力する。減算器53では、アシスト電流Iaから補正されたヨーレート反力補正電流Iy*を減算し目標電流Itとして、駆動電流制御部54に出力する。
(もっと読む)
車両用操舵装置、車両用操舵装置付き車両および車両用操舵方法
【課題】 運転者への違和感を抑制することができる車両用操舵装置、車両用操舵装置付き車両および車両用操舵方法を提供すること。
【解決手段】 転舵角の推定値としての推定転舵角と実転舵角との偏差である転舵角偏差が増加している場合には、転舵角偏差が増加していない場合よりも大きな操舵反力を操舵部に付与するようにした。
(もっと読む)
車両用操舵装置
【課題】運転者がステアリングホイルの切り遅れという違和感を抱くことなく、カーブを走行可能な車両用操舵装置を提供する。
【解決手段】ステアリングホイルの操舵角θhを検出する操舵角センサ3と、ステアリングホイルの操舵角速度dθh/dtを算出する角速度算出部23とを備え、操舵角θhと操舵角速度dθh/dtに基づいて目標転舵角θfを設定し、車両の転舵輪の転舵角が目標転舵角θfになるように転舵輪を転舵する車両用操舵装置において、車両が現在走行している車道の中心線の曲線半径Rを検出し、操舵角速度ゲインK1を曲線半径Rが小さくなると増大するように設定し、操舵角θhと操舵角ゲインK0の積K0・θhと操舵角速度dθh/dtと操舵角速度ゲインK1の積K1・dθh/dtとの和に基づいて目標転舵角θfを設定する。
(もっと読む)
車両の横方向ダイナミクスを制御するための方法及び装置
本発明は、車両(1)の横方向ダイナミクスを制御するための方法、及び車両(1)のための横方向ダイナミクス制御装置に関する。操作条件が満たされた場合には、シャーシ操作が実行される。この操作条件が満たされるのは、測定された横方向ダイナミクス外乱変数の絶対値が、外乱変数限界値よりも大きいときであり、また、下記の諸基準の中の1つ、又は下記の諸基準の中の複数の基準が満たされているときである。
− 車両縦方向速度が車両縦方向速度限界値よりも大きい、
− センサによって測定された実測ヨーレイトが、算出された現在のヨーレイト以下である、
− 運転者によって制動を通して引き起された、ブレーキトルク値を表しているブレーキトルクが、ブレーキトルク限界値以下である、
− 車両ホイールのシャーシスプリングにおける現在のスプリングのたわみを表すスプリングたわみ値が、スプリングたわみ限界値以下である、
− 2つのシャーシスプリングにおける現在のスプリングたわみの差を表すスプリングたわみ差異値が、スプリングたわみ差異限界値以下である、
− 2つの車両ホイールの間のスキッド差を表すスキッド差値が、スキッド差限界値以下である。
(もっと読む)
車両の制御装置
【課題】トルクステアによるステアリングホイールの操作を運転者の操舵状態によらずに効果的に収束させる。
【解決手段】EPS200を備えた車両10において、ECU100はトルクステア抑制処理を実行する。当該処理において、車両10が加速中であり、且つステアリングホイール11が手放し状態である場合に、モータ17から手放し時アシストトルクATRQ1が出力される。一方、ステアリングホイール11が手放し状態ではなく、且つ所定の許可条件が満たされた場合、モータ17から操舵時アシストトルクATRQ2が出力され、運転者の操舵操作が阻害されない範囲でステアリングホイール11の戻り不良が補償される。また、手放し時アシストトルクの出力中に操舵入力がなされた場合には、切り込み及び切り戻しの各々に応じて切り替え処理が行われ、アシストトルクが徐変されることによって違和感が抑制される。
(もっと読む)
ステアバイワイヤシステム
【課題】電気式のバックアップ手段を有するステアバイワイヤシステムのフェールセーフ機構において、その信頼性と操作性を向上させること。
【解決手段】ステアバイワイヤシステム100の操舵力伝達機構は、プッシュプルワイヤーからなるケーブル70と、それを巻き取るケーブル巻き取り装置71と、ケーブル70の張力に基づいてギヤボックス18G′を駆動するケーブル駆動機構72と、ケーブル70の張力を制御するケーブル張力変更手段73を用いて構成されている。機械式整流器35(転舵モータ転流手段)に供給される直流電位は、スイッチSW2を用いて構成される本発明の給電電圧変更手段によって、バッテリーBT0から供給される低電位とバッテリーBT1から供給される高電位の何れかから選択される。ケーブル張力変更手段73に供給される直流電位も、本発明の給電電圧変更手段によって制御される。
(もっと読む)
転舵装置
【課題】 左右後輪のうちの一方の車輪のみが転舵異常となったときに、その状態で走行する際における車両の安定性および車両の操作性を良好にすること。
【解決手段】 転舵異常検出手段が片輪転舵異常を検出したとき(S201:NoまたはS202:No)に、車速Vが基準車速V0以下の場合(S205:YesまたはS209:Yes)には、後輪の転舵正常輪を転舵異常輪の転舵方向とは逆方向に転舵する(S208、S212)。また、車速Vが基準車速V0よりも大きい場合(S205:NoまたはS209:No)には、後輪の転舵正常輪を転舵異常輪の転舵方向と同一方向に転舵する(S208、S212)。これにより、低速走行時の操作性および高速走行時の走行安定性を両立できる。
(もっと読む)
車輌の走行制御装置
【課題】車輪のタイヤ空気圧が低下し当該車輪の接地荷重が低減される場合にも車輌の良好な走行安定性を確実に且つ効果的に確保する。
【解決手段】タイヤ空気圧低下率RPwtiに基づきタイヤ空気圧低下判定の基準値Pwteiが演算され(S20、30)、各車輪についてタイヤ空気圧Pwtiが基準値Pwteiよりも低いか否かの判別によりタイヤ空気圧が低下している車輪があるか否かの判別が行われ(S40)、何れかの車輪のタイヤ空気圧が低下しているときには、ステップ60に於いてタイヤ空気圧の低下度合に応じて制御ゲインKctが演算され(S60)、タイヤ空気圧が低下している車輪の接地荷重が低減され(S100)、接地荷重の変更に起因する車輌のステア特性の変化が低減されるようステアリングギヤ比(S200)、操舵アシスト力(S300)、制駆動力の配分(S400)が制御される。
(もっと読む)
ロック装置、伝達比可変装置、及び車両用操舵装置
【課題】電源電圧の低下時においても速やかにロック状態を解除することのできるロック装置、伝達比可変装置、及び車両用操舵装置を提供することにある。
【解決手段】モータ11の各モータコイル11u,11v,11w、並びにIFSECUに設けられたノイズ除去コイル73をエネルギー蓄積用のコイルとして用いる。そして、ロック解除時において電源電圧が所定電圧よりも小さい場合には、ソレノイド37に対し、これら各コイルに蓄積されたエネルギー、即ちサージ電圧を印加する。
(もっと読む)
車両用操舵装置及び車両用操舵制御方法
【課題】 ドライバが車両運動の変化を視覚情報で判定することなく、適切なカウンタ操舵角をドライバに教示するアシスト制御を提供すること。
【解決手段】 車両の強オーバステアを検知し、且つ操舵方向がカウンタステア方向と判定した場合には、操舵トルクを転舵輪側へ伝達する伝達要素内の静/動フリクションを低減またはゼロに補正するようにした。
(もっと読む)
車両用操舵装置
【課題】 簡素な構成にて、高い信頼性を確保することのできるステアバイワイヤ式の車両用操舵装置を提供すること。
【解決手段】 車両1は、各車輪3から機械的に分離されたステアリング10に入力されるステアリング操作に応じて車両1のヨーモーメントを制御するステアバイワイヤ式の車両用操舵装置11を備える。各車輪3は、その舵角の変更が不能に設けられ、車両用操舵装置11は、各車輪3に対する駆動力分配を可変可能な駆動力分配装置12と、及び該各車輪3における制動力を各車輪3毎に制御可能な制動力制御装置13とを有して構成される。そして、車両用操舵装置11は、各車輪3に伝達される駆動力、及び該各車輪3における制動力を該各車輪3毎に制御することにより、車両1のヨーモーメントを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドルの戻時、操舵力付加時と手放し時との移行時に反力が急変せず違和感を与えないようにする。
【解決手段】アシスト目標電流に従いモータ制御されるパワーステアリング装置において、舵角検出手段27,34と、実舵角速度ωを演算する演算手段40と、舵角θに基づきベース修正舵角速度ωmbを演算する演算手段35と、車速vに基づき車速乗算係数値kvを演算する演算手段36と、ベース修正舵角速度ωmbに車速乗算係数値kvを乗算し目標舵角速度ωmを演算する演算手段37と、目標舵角速度ωmと実舵角速度ωとの差に基づいてベース修正電流値Isbを演算する演算手段41,42と、操舵トルクTに基づき操舵トルク乗算係数値ktを演算する演算手段45と、ベース修正電流値Isbに操舵トルク乗算係数値ktを乗算し修正電流値Isを演算する演算手段46と、アシストベース電流値Ibに修正電流値Isを加えてアシスト目標電流Ioとする演算手段47とを備える。
(もっと読む)
車両の電動パワーステアリング装置
【課題】 運転者の安全を妨げることなく、衝突時の衝突エネルギを前輪でより効率よく吸収することができる車両のパワーステアリング装置を提供する。
【解決手段】 本発明は、電動モータ16によりステアリング機構10にアシスト力を付与する車両の電動パワーステアリング装置であって、電動モータを制御する制御手段(20)と、車両の衝突の可能性を推定する衝突可能性推定手段(20)と、を有し、制御手段は、衝突可能性推定手段により衝突の可能性があると推定されたとき、衝突の可能性がないときより、運転者の操舵によりステアリング機構の舵角が増大しにくくなるように電動モータを制御する。
(もっと読む)
1 - 17 / 17
[ Back to top ]