
Fターム[3D232DA63]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 電動機状態量 (3,403) | モータ回転数(位置、角速度、角加速度を含む) (1,387)
Fターム[3D232DA63]に分類される特許
1 - 20 / 1,387
電子制御装置、および、これを用いた電動パワーステアリング装置
車両用操舵装置
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
モータ制御装置及び車両の電動パワーステアリング装置

【課題】インバータ回路のトランジスタに発生する異常をより確実に検出することのできるモータ制御装置を提供する。
【解決手段】このモータ制御装置15は、インバータ回路20に設けられた対をなすトランジスタT1〜T6のスイッチングを制御することでモータ11に三相の交流電流を供給する。また、モータ11に供給される各相電流値を電流センサ30u,30v,30wを通じて検出し、検出される各相電流値に基づいてトランジスタT1〜T6に貫通電流が発生していると判断されるとき、インバータ回路20の駆動を停止させる。ここでは、各相電流値に対して第1の閾値を設定するとともに、各相電流値の総和に対して第2の閾値を設定する。そして、各相電流値の絶対値の少なくとも一つが第1の閾値以上であって且つ、各相電流値の総和の絶対値が第2の閾値以上であるとき、トランジスタT1〜T6に貫通電流が発生していると判断する。
(もっと読む)
油圧式パワーステアリング装置
【課題】切り込み状態から操舵部材が中立位置に向かって戻される場合に、切り込み方向の操舵補助力が不足するのを抑制できる油圧式パワーステアリング装置を提供する。
【解決手段】ダンピング制御部62は、検出操舵トルクThの方向が切り込み方向でありかつその大きさ(絶対値)が第1の閾値以上であり、操舵角速度ωhの方向が切り戻し方向でありかつその大きさ(絶対値)が第2の閾値以上のときに、操舵角速度ωhに応じたダンピングトルク指令値TD*を設定する。加算部63は、基本アシストトルク指令値設定部61によって設定される基本アシストトルク指令値TAO*に、ダンピング制御部62によって生成されるダンピングトルク指令値TD*を加算する。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
電動パワーステアリング制御装置
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
油圧パワーステアリング装置
【課題】操舵補助装置に供給される作動油の量を正確に制御することに貢献する油圧パワーステアリング装置を提供する。
【解決手段】油圧パワーステアリング装置1は、パワーシリンダー20と、パワーシリンダー20に供給される作動油の流れを制御するロータリーバルブ70(以下、「バルブ70」)と、バルブ70を駆動する電動モーター50と、電動ポンプ24とバルブ70とを接続するポンプ吐出油路92と、パワーシリンダー20とバルブ70とを接続する各供給油路93,94と、電動モーター50を制御する制御部30とを有する。油圧パワーステアリング装置1は、シャフト42の回転角度を検出する回転角センサ60を有し、バルブ70は、電動モーター50のシャフト42と一体的に回転する弁体と、各油路92〜94と接続される空間を内部に有するハウジングとを有し、制御部30は、電動モーター50の制御に回転角センサ60の出力を反映する。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
車両の走行制御装置
【課題】車両を目標走行ラインに沿って走行させるため操舵輪の舵角が目標舵角になるよう舵角可変装置を制御する方法を提供する。
【解決手段】操舵輪の舵角δが目標舵角δtになるよう舵角可変装置を制御することにより車両を目標走行ラインに沿って走行させる車両の走行制御装置に於いて、操舵輪の目標舵角に対する実舵角の追従性悪化の指標値δerrが基準値δcよりも大きいときには、車両の目標状態量γtは目標舵角に基づく車両の目標状態量に設定され、これにより舵角の追従性悪化に起因する車両の走行ラインの目標走行ラインからのずれが車両の目標状態量に基づく走行運動の制御によって低減される。
(もっと読む)
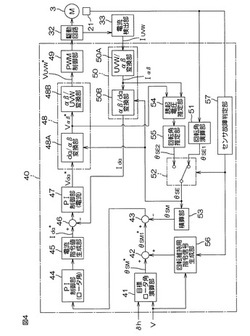
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動モータの抵抗の推定精度が低下することを抑制することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の電子制御装置30は、測定電流Imaおよび測定電圧Vmaを用いて第1抵抗値Raを算出する第1抵抗算出部61と、この第1抵抗算出部61とは異なる手段により第2抵抗値Rbを算出する第2抵抗算出部62とを有する。そして第2抵抗値Rbよりも小さい第1抵抗値Raを演算抵抗値として確定する。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
1 - 20 / 1,387
[ Back to top ]