
Fターム[3D232DA86]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車外からの情報 (852)
Fターム[3D232DA86]の下位に属するFターム
GPS (411)
地上からの情報(画像等を含む) (414)
Fターム[3D232DA86]に分類される特許
1 - 20 / 27
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
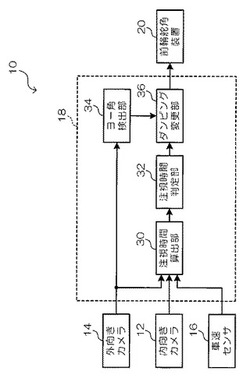
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
車両挙動制御装置

【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
戦闘用装置
【課題】オペレータの人的負担を軽減しながら、オペレータの認識状況や通信環境に左右されずに、瞬時の判断及び行動を実施することを可能とした戦闘用装置を提供する。
【解決手段】自律又は遠隔操縦によって走行及びミッションが実行可能な戦闘用装置であって、車両1と、車両1周辺の環境について車両環境情報を有するデータベースと、遠隔操縦を行う場所に設置された無人機エージェント、を備え、無人機エージェントは、車両環境情報に基づいて走行及びミッションについて制御方法の選択を行う車両制御機構を有する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
車線逸脱防止装置
【課題】運転者による保舵状態を短時間で適切に判定できる車線逸脱防止装置を提供する。
【解決手段】車線逸脱防止装置を、自車両の走行車線を設定する車線設定手段110と、運転者の操舵操作による操舵角を検出する操舵角検出手段150と、運転者の操舵操作による入力トルクを検出するトルク検出手段140と、走行車線からの自車両の逸脱傾向を判定する逸脱判定手段130と、逸脱判定手段が逸脱傾向を判定した場合に、逸脱を防止する方向へ操舵機構10にパルス状の操舵トルクを付与する操舵制御手段170と、パルス状の操舵トルクを付与した際の操舵角の変位量が所定の閾値以上であり又は入力トルクが所定の閾値以下の場合に運転者による保舵状態低下を判定する保舵状態検出手段160とを備える構成とする。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
設計方法
【課題】例えば、操舵感を高めるためのダンピング制御量を設計する。
【解決手段】車両を組み上げるに先んじて、ダンピング制御量の一例である粘性項を設計可能であることから、車両を組み上げてからダンピング制御量を算出しなくてもよく、EPS、及びEPSを搭載した車両の開発費を低減できると共に、ダンピング制御量を設計するために用いられる車両或いはEPSを組み上げるための期間を低減でき、車両及びEPS等の開発期間を短縮できる。加えて、慣性項、弾性項、及び減衰係数について各車両に対応した設計値が取得されることによってダンピング制御量が設計可能になるため、互いに異なる車両の夫々について車両、或いはEPSを組み上げることなく、車両毎にダンピング制御量を設計可能である。
(もっと読む)
電磁誘導式自動走行車の停止制御方式
【課題】 停止エリア外では高速での走行が可能であり、停止エリア内では、停止位置の精度に優れた電磁誘導式自動走行車の停止制御方式を提供する。
【解決手段】 電磁誘導式自動走行車が停止エリアに入ったことが検出された場合には、駆動モータ4の回生制動と、ドラムブレーキ10a〜dとを用いて減速し、その後に停止信号が検出された場合には、あらかじめ設定されている走行距離を走行した後に、電磁クラッチブレーキ15を用いて停止をする。そして、あらかじめ設定されている走行距離と、実際の走行距離とを比較し、その差が設定範囲を超えているような場合には、前記電磁クラッチブレーキを解除し、前進又は後退の微調整走行をした後に、再び前記電磁クラッチブレーキを用いて停止をする。
(もっと読む)
車両制御システム
【課題】車両に搭載する太陽電池モジュールの用途を拡大し、太陽電池モジュールの付加価値を向上させる。
【解決手段】車両制御システムは、車両の外部に設けられる光源と、この光源から照射される光を受けて車両の走行制御を行う制御装置5とにより構成される。各光源は、車両の進行方向に沿って照射される光の点滅周期が異なるように設定されている。制御装置5は、車両の天板に縦横に配列された複数の太陽電池セル6により構成される太陽電池モジュール4と、車両の進行方向を求める進行方向判定部11と、パワステモーター回転制御部13を自動制御する操舵角制御部14と、ギア制御部16、アクセル制御部18及びブレーキ制御部20を自動制御する駆動制御部21とを備えている。進行方向判定部11は、光源から照射される光の点滅周期を太陽電池セル6の発電量で検出し、進行方向を判定する。
(もっと読む)
車両走行制御装置及び車両走行システム
【課題】周囲の車両との関係を検知して安全性を確保しつつ、車間距離を短縮して車両走行を行える車両走行制御装置及び車両走行システムを提供すること。
【解決手段】車両A2の周囲における操舵による衝突回避スペースR1があるか否かを検出し、操舵による衝突回避スペースR1が所定以上である場合に先行車両A1との車間距離D1を基準車間距離より短くなるように走行制御を行う。これにより、周囲を走行する他車両と隊列を組んで走行する際に、先行車両A2との衝突を回避しつつ、車間距離D1を短くして車両走行が行える。このため、隊列を組む車群内への他車の割り込みを抑制することができ、走行の安全性が確保できる。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者の心理状態(感情)を総合的に判断し、判断結果に基づいた車両制御を行なうこと。
【解決手段】自車両状態検知部12が自車両の状態を検知し、感情推定部16が自車両の状態から運転者の感情を推定する、もしくは自車両が特定の状態となった場合に、生体状態監視部13が取得した情報を用いた感情推定を起動することで、運転者の心理状態を総合的に判断し、制御内容決定部15による運転者への通知制御と、車両の挙動制御へ反映させることで、積極的に事故などを防止する。
(もっと読む)
電動パワーステアリング制御装置
【課題】低速時であっても実際の車両の走行状態に応じた適切なモータ通電制御を行うことができ、モータ等の発熱、及び消費電力を抑制することができ、操舵フィーリングも向上させることができる電動パワーステアリング制御装置を提供すること。
【解決手段】ハンドル1に加えられた操舵トルクと、車速とに基づいて、操舵補助トルクを発生させるモータ5への通電量を制御するマイコン11を備え、マイコン11が、車輪の回転に伴ってパルス信号を出力する車速センサ6で検出困難な低速度状態となった場合に、低速度域における速度検出も可能なレーダ装置7で検出された車速に応じて通電制御を行う。
(もっと読む)
車両遠隔操作システム
【課題】遠隔操作時のセキュリティ性とユーザ利便性とを適切に両立させる車両遠隔操作システムを提供すること。
【解決手段】携帯端末を利用して遠隔操作により車両を移動させる車両遠隔操作システムにおいて、遠隔操作対象車両を第一の状態から第二の状態へ移行させる第一の遠隔車両移動操作を実行する際にユーザに要求される認証の厳格さの程度と、遠隔操作対象車両を上記第二の状態から上記第一の状態へ移行させる第二の遠隔車両移動操作を実行する際にユーザに要求される認証の厳格さの程度とを異なるものとする。第一の状態は例えば車両が所定の駐車スペース内に停車している入庫状態であり、第二の状態は例えば車両が所定の駐車スペース外で停車している出庫状態であり、その場合、第一の遠隔車両移動操作を実行する際にユーザに要求される認証の厳格さの程度を第二の遠隔車両移動操作を実行する際にユーザに要求される認証の厳格さの程度よりも厳しくする。
(もっと読む)
車両用操舵装置
【課題】パワーステアリングシステムを利用して自動駐車を実行するときに、トルク不足が生じないこと。
【解決手段】操舵補助用の電動モータ15が、減速機構17を介してステアリングシャフト3の出力軸3bに動力を伝達する。減速機構17の減速比は、減速比変更アクチュエータとしての電動モータ23,43によって変更可能である。上記の電動モータ15を用いて自動駐車を実行するときに、減速機構17の減速比を、高減速比である第1の減速比R1に設定し、操舵機構Pに高いアシストトルクを付加する。
(もっと読む)
車両用操舵装置、自動車及び車両操舵方法
【課題】轍路で制駆動した場合のハンドル取られを抑制すること。
【解決手段】操向車輪の輪荷重が大きいほど補助操舵トルクを大きくするようにした(第4トルク算出手段28)。すなわち、操向車輪の輪荷重が大きい場合には補助操舵トルクが大きくなるので、例えば、轍路走行時、操向車輪の一方が轍に乗り上げて走行しているときに(路面と操向車輪との接地点が車幅方向外側であるときに)、操向車輪に制駆動力が発生し、操向車輪の輪荷重が増大し、操向車輪と路面との間に働く力が増大して、キングピン軸周りに操向車輪を回転させる回転モーメントが増大し、操舵トルクが発生した場合には、大きな補助操舵トルクが発生され、その結果、轍路で制駆動した場合のハンドル取られを抑制することができる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】バッテリ残量が少ない状態で走行した場合に、セーフティ機能が働くか否かを確認して、セーフティ機能が働かない場合に運転者に通知することができる車両制御装置を提供する。
【解決手段】危険度算出部36は、目的地までの走行ルート上の環境情報に基づいて危険度を算出し、算出した危険度が所定の危険度以上の地点を特異な充放電が予想されるポイントに設定する。セーフティ機能確認部37は、上記の各ポイントで必要となるセーフティ機能を確認し、車両情報に基づいて各ポイントでの対応可否、使用装備、使用電気量を運行状態予測部39に入力し、運行状態予測部39はバッテリ状態、電装品の駆動状態、環境情報、及び、セーフティ機能確認部37の判断結果に基づいてバッテリの充放電制御を予測することにより、セーフティ機能に必要なバッテリ量が残っているか否かを判断する。
(もっと読む)
安全走行支援装置
【課題】本発明では地図データとその利用に関する知識(道路知識)を用いて安全誘導を行なうことを課題とする。
【解決手段】上記の課題を解決するため、道路の個々のレーン、停止線、導流線、および車歩道境界(道路縁石)を記載した道路地図データに車両位置を重畳させ、交差点での車両位置を地図にて把握し、さらに道路知識DBによって道路構造物と車両位置の関係を判定し位置関係、距離に基づいて次に取るべき運転情報を運転者に知らせる。
(もっと読む)
車両用走行支援装置
【課題】
本発明は、車両用走行支援装置において、側突時に自車両と相手車両とが受ける衝撃を抑制することが可能な車両用走行支援装置を提供することを課題とする。
【解決手段】
自車両の各センサの信号を入力して算出した自車両の走行状態と、車車間通信により受信した相手車両の情報とを照合して、両車両の側突の発生の予測がある場合には、相手車両が回避操舵する方向に応じて自車両を加速又は減速させるように制御することで、自車両と相手車両との間において側突の発生を回避する。
(もっと読む)
軌道系交通システム
【課題】 予め定められた軌道上を自動的に操舵して走行する軌道系の交通システムにおいて、構造の簡素化、軽量化を達成でき、確実に安全を担保でき、かつ効率的な運転、および高速運転を可能とする軌道系交通システムを提供することを課題とする。
【解決手段】 アクチュエータ36によって自動操舵する操舵機構26と、軌道01上に設けられた保護軌道14と、保護軌道14に沿って非接触で車両12とともに移動する保護輪40とを備えて、自車位置情報から軌道が直線部、曲線部、または分岐部、等を判断する軌道情報判断手段84の判断結果に応じて自動操舵と保護軌道への保護輪の接触による操舵とを制御する制御手段82とを備えることを特徴とする。
(もっと読む)
1 - 20 / 27
[ Back to top ]