
Fターム[3D232DC09]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 計時手段(タイマー) (523)
Fターム[3D232DC09]に分類される特許
1 - 20 / 523
運転集中度基盤の車線維持制御装置およびその方法
自動車
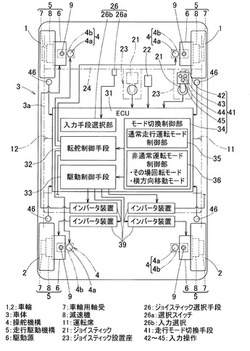
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
操舵制御装置

【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
追従制御装置
【課題】自車両を先行車に適切に追従させる。
【解決手段】追従制御装置(100)は、通信により取得された先行車(20)に係る舵角情報に基づいて、自車両(10)を先行車に追従させる制御である追従制御を実施可能な追従制御装置である。該追従制御装置は、追従制御が実施されておらず、且つ、自車両の直進走行時における(i)先行車に係る舵角情報及び(ii)自車両に係る舵角を、夫々取得する取得手段(15)と、取得された先行車に係る舵角情報と取得された自車両に係る舵角との差分を算出し、該算出された差分を自車両の舵角中点として設定する設定手段(15)と、を備える。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
電動パワーステアリング制御装置
【課題】車載装置からの指令に基づく制御と通常のパワーステアリング制御との両立を安価な手段で実現可能な電動パワーステアリング制御装置を得る。
【解決手段】メインマイコン503とメインマイコン監視回路511とを備える。メインマイコン503は、トルク信号TRQに基づきパワーステアリング指示電流ImtEPSを決定するパワーステアリング制御部503cと、自動駐車制御信号PASigに基づき自動駐車制御電流ImtPAを決定する自動駐車制御部503dと、モータ電流指示値Imt1を切替える切替信号生成処理部503eおよびモータ電流切替部503fと、監視特性を切替える監視回路モード選択部503jおよび監視回路特性切替部503mとを有する。メインマイコン監視回路511は、モータ電流検出信号Imdが制限値を超えた場合に異常状態と判定して制御を停止する。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
パワーステアリング装置
【課題】省電力化が図れるとともに、操舵補助力が必要な場合に電動モータの駆動が停止されたり、電動モータの回転速度が低速に制御されたりするのを回避できるパワーステアリング装置を提供する。
【解決手段】電動モータ24が通常モードで駆動制御されている場合において、車速Vsが閾値A1以下でかつ操舵角速度Vhが閾値B1以下でかつモータ電流Imが閾値C1以下の状態が閾値D1で規定される第1の所定時間以上継続したときには、制御モードが省電力モードに切り換えられる。これにより、電動モータ24の目標回転速度Vp*が第1の目標回転速度Vp1*から第2の目標回転速度Vp2*に切り換えられる。
(もっと読む)
電動パワーステアリング装置
【課題】アシスト開始時間を短かくすることの可能な電動パワーステアリング装置を提供する。
【解決手段】EPSの備えるマイコンは、イグニッションスイッチがオンされた後、ECUがモータを通電制御する前に、モータまたはモータ駆動回路の故障診断処理を行う。ステアリングホイールとともに回転するモータの角速度が所定値よりも大きい場合(S1:YES)、処理は、故障診断の実施を省略する(S7:YES)。これにより、イグニッションスイッチがオンされてからモータの通電制御を開始するまでの時間が短縮される。
(もっと読む)
操舵支援装置
【課題】ドライバの運転意思に応じて制御方法を適切に変更する操舵支援装置を提供する。
【解決手段】自車両が走行車線に沿って走行するように操舵機構に操舵力を付与する操舵支援装置を、環境認識手段と、環境認識手段を用いて目標走行位置を設定する目標走行位置設定手段と、自車両の横位置を認識する自車横位置認識手段と、目標走行位置と横位置との偏差に基づいて目標操舵力を設定する目標操舵力設定手段と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段と、ドライバの運転意思を判定する運転意思判定手段とを備え、目標操舵力設定手段は、偏差の増加に応じて増加するよう設定される第1の目標操舵力と、偏差が所定値以上の時のみ所定の値に設定される第2の目標操舵力とを有し、操舵制御手段は、ドライバの運転意思が高い状態と判定されたときは前記第1の目標操舵力に基づいて操舵力を付与するとともに、運転意思が低下状態と判定されたときは第2の目標操舵力に基づいて操舵力を付与する構成とする。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵支援トルクの急激な変化や断続的な変化を抑制することが可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】走行路における目標通過位置へ到達するまでに自車両が目標とする姿勢角及び横位置を算出する誘導状態算出部16と、誘導状態算出部16が算出した姿勢角及び横位置と、自車両の現在の姿勢角、横位置及びヨーレートに基づき、誘導経路を生成する誘導経路生成部18と、誘導経路を自車両が走行するための目標操舵角を算出する目標操舵角算出部22と、現在操舵角を検出する操舵角センサ20と、目標操舵角と現在操舵角との差分である操舵角偏差を算出する操舵角偏差算出部24と、操舵角偏差を縮小させるための操舵支援トルクを算出する操舵支援トルク算出部26と、操舵支援トルクを操舵輪へ出力する操舵支援トルク出力部32を備える。
(もっと読む)
操舵補助制御装置
【課題】操舵補助制御実行中における運転者の適正な関わりを検出するとともに、運転者の操舵補助制御に対する監視放棄を抑制することのできる操舵補助制御装置を提供すること。
【解決手段】操舵補助制御中の第1所定時間経過後に(S1)、アシストトルクを通常の操舵補助制御に基づく目標アシストトルクから運転監視確認用アシストトルクに調整し(S2〜S4)、所定期間内に運転者の反応が検出されなかった場合には(S5、S7)、運転者への警告を発するとともに操舵補助制御を停止する(S8)。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
1 - 20 / 523
[ Back to top ]