
Fターム[3D232DC31]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 判定基準(a、b)を有するもの (3,077)
Fターム[3D232DC31]の下位に属するFターム
判定基準の種類 (2,725)
判定基準を変更できるもの (49)
Fターム[3D232DC31]に分類される特許
1 - 20 / 303
車両姿勢制御装置
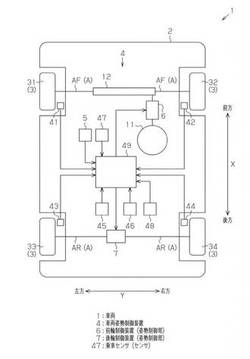
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
電動パワーステアリング装置

【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置において、各部の異常診断を行い、確定した異常である場合は異常確定信号を出力し、不確定異常である場合は異常判断信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置からコントロールユニットに電力を供給して、異常診断を実行する。それぞれに割り当てられた診断時間の間、各部の検出した異常が確定した異常である場合に異常確定信号を出力する異常検出部と、確定に至らない不確定異常を異常検出部が検出した回数であるカウント値を記憶するカウント値記憶部と、カウント値に基づいて、各部に確定した異常が発生する可能性の程度を段階的に判断して異常判断信号を出力する判断部とで構成する。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
電動パワーステアリング装置
【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】コントロールユニットを具備した電動パワーステアリング装置において、それぞれに割り当てられた診断時間の間、各部の異常診断を行い、検出した異常が確定した異常である場合は異常確定信号を出力し、検出した異常が確定には至らない不確定異常である場合は不確定異常信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置からコントロールユニットに電力を供給して、異常診断を実行するようになっており、検査装置は、複数の異常診断手段からの不確定異常の検出カウント値を記憶する機能と、確定した異常が発生する可能性の程度を判断する機能とを具備している。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】不必要な据え切り操作を極力させないように、意図的な据え切り以外の動作を抑制することにより、車両において無駄な電力消費を抑制する。
【解決手段】操舵部材と、車速を検出する車速検出部と、検出された車速が規定値よりも小さいかどうかを判定する車速判定部と、操舵部材に操舵反力を付与する反力モータと、転舵輪を転舵させる転舵駆動機構と、転舵駆動機構を駆動する転舵モータとを備える。車速判定部によって、検出された車速が規定値よりも小さいと判定された場合に、操舵部材の操舵角の増加に伴って転舵モータの通電を制限するとともに、操舵反力が急激に増大するように反力モータを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの電気的抵抗が精度良く推定することが可能となる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、電動モータ20の電気的抵抗の推定値に基づいて同電動モータ20の回転速度を算出する。そして、舵角センサ54の出力が舵角一定条件を満たすとき、かつ、電動モータ20の誘起電圧が誘起電圧一定条件を満たすとき、電動モータ20の電気的抵抗の推定値を推定して更新する。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
電力変換装置
【課題】コンデンサのリップル電流を低減しつつ、スイッチング素子間の熱損失の偏りを低減する電力変換装置を提供する。
【解決手段】電力変換装置1は、第1インバータ部20および第2インバータ部30と、コンデンサ50と、マイコン51と、を備える。マイコン51は、第1デューティ中心値Dc1が出力中心値Rcよりも下側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも上側にシフトされる第1状態と、第1デューティ中心値Dc1が出力中心値Rcよりも上側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも下側にシフトされる第2状態と、をステアリングホイール91の操舵状態に応じて切り替える。これにより、コンデンサ50のリップル電流を低減しつつ、MOS21〜26、31〜36間の熱損失の偏りを低減することができる。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
パワーステアリング装置
【課題】アイドルストップ機能を有する自動車に搭載されるパワーステアリング装置において、電動モータが発電状態となったときに発生する起電力から電動モータ駆動用のインバータを保護しつつ、アイドルストップ中の消費電力を低減する。
【解決手段】アイドルストップ中であるか否かを判定するアイドルストップ状態判定手段(ステップS106,107)と、上記電動モータが発電状態にあるか否かを判定する発電状態判定手段(ステップS102)と、を設け、アイドルストップ状態判定手段がアイドルストップ中でないと判定している場合、少なくとも上記電動モータが発電状態にあると上記発電状態判定手段が判定しているときに弱め界磁制御を行う一方、上記アイドルストップ状態判定手段がエンジンの自動停止中であると判定している場合には弱め界磁制御を停止する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵角センサの検出値とモータ回転角センサの検出値に基づく値との差分を用いて操舵トルクを推定する電動ステアリング装置において、操舵トルクを精度良く推定する。
【解決手段】操舵軸に接続された電動モータ13と、操舵トルクに応じて電動モータを駆動する制御装置とを有する電動パワーステアリング装置であって、操舵角を所定周期毎に検出する操舵角センサ15と、電動モータのモータ回転角を所定周期毎に検出するモータ回転角検出センサ手段14と、モータ回転角に基づいて算出した操舵軸の電動モータが接続された部分の回転角と操舵角との差に基づいて操舵トルクを推定する操舵トルク推定部手段32とを有し、操舵トルク推定部は、操舵角検出手段が任意の時間に検出した今回操舵角と前回操舵角とが等しい場合には、モータ回転角に基づいて今回操舵角を補正する。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】6つのFET31のうちの1つが短絡故障した場合には、制御可能領域特定部41は、電動モータ18の駆動を停止させた後、短絡故障が発生しているFETを特定するための処理を行なう。つまり、制御可能領域特定部41は、まず、各相の相電圧に基づいて、短絡故障が発生しているFETの上下段の位置(ハイサイドまたはローサイド)を特定する。次に、制御可能領域特定部41は、特定された上下段位置と、U相、V相およびW相の相電流のうちの2つの相電流とに基づいて、電圧短絡故障が発生しているFET31の相を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】二系統のモータを同期制御する制御装置の演算負荷を軽減できる電動パワ−ステアリング装置を提供する。
【解決手段】モータ制御指令出力手段31は、第1指令値演算手段30により生成された第1の指令値とモータ駆動系毎の電流をモータ駆動系電流加算手段により加算された電流値に基づき、第2指令値演算手段34,35により演算された第2指令値をモータ制御指令としてモータとこのモータを駆動する駆動回路から構成される二系統のモータ駆動系に出力する。
(もっと読む)
電動パワーステアリング装置
【課題】平坦路と悪路の走行時の車両の直進安定性と操舵フィーリングの向上を図ることが可能な電動パワ−ステアリング装置を提供する。
【解決手段】モータは、二系統のモータコイルに共通のステータ及びロータを有しており、ECU(制御手段)は、これらの各モータコイルに対して、それぞれ独立に駆動電力を供給することにより、そのモータトルクを制御する。
車両が悪路走行していると判断した場合には、操舵トルク及び車速に応じてアシストトルクを制御するトルク制御を実行している系統の他方の系統のモータの少なくとも二相間を短絡して制動動作させる。
(もっと読む)
後側方操舵支援技術
【課題】車両周辺の物体について、運転者に気付かせる役割を果たす警報と、回避のために運転者の運転操作を支援するための操作支援とを、運転者に違和感を生じさせないようシームレスに組み合わせる。
【解決手段】後側方など車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度を算出し、車両が物体に到達するまでの余裕時間を算出する。車両には、制御信号をステアリングアクチュエータに印加して操舵を補助する手段が備えられ、上記の距離、相対速度、余裕時間の少なくとも1つに応じて、パルス状の信号を生成し、該パルス状の信号を前記制御信号に重畳して、該重畳された制御信号が、前記ステアリングアクチュエータに印加されるようにする。相対速度が大きくなるほどパルスの周波数を高く、そして、前記距離または余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるように該信号を生成する。
(もっと読む)
操舵装置
【課題】 不揮発性メモリに推定温度データを書き込むことができなかった場合でも、過熱防止機能を維持しつつ、電動モータによる操舵機能が十分得られるようにする。
【解決手段】 マイコンは、EEPROMのデータが異常である場合には、予め高温設定された仮基板温度Tbmaxから温度センサにより検出された基板温度Tbを減算した基板温度変化値ΔT(Tbmax−Tb)を使って、モータ推定温度を計算するための各仮温度値SUM1max,SUM2max,SUM3maxを補正する(S61,S62)。従って、基板温度Tbに応じた初期値SUM1(n-1),SUM2(n-1),SUM3(n-1)を設定することができる。この場合、温度センサが異常である場合には、基板温度変化値ΔT(Tbmax−Tb)を使った補正を行わない(S63)。
(もっと読む)
車両操舵装置用電動モータユニットの製造方法
【課題】電動モータのゼロ点位置とセンサのゼロ点位置との間のオフセット値を容易に求めることのできる車両操舵装置用電動モータユニットの製造方法を提供する。
【解決手段】伝達比制御モータのロータのゼロ点位置と第1レゾルバのゼロ点位置との間のオフセット値A1を設定するようになっている。具体的には、第1レゾルバを用いたフィードバック制御により、伝達比制御モータが定格出力を発生するように伝達比制御モータを駆動させる(ステップS5)。このとき、伝達比制御モータが定格出力で回転しないときには(ステップS6でNO)、オフセット値A1を変更する(ステップS8)。一方、伝達比制御モータが定格出力で回転したとき(ステップS6でYES)には、オフセット値A1の設定を完了する。
(もっと読む)
車両用操舵装置
【課題】センサの異常をより確実に検出することができ、且つ、製造コストの点からも好ましい車両用操舵装置を提供する。
【解決手段】車両用操舵装置1は、操舵部材に連結される入力軸18と転舵機構に連結される出力軸19との間に介在する伝達比可変機構13と、伝達比制御モータ14と、伝達比制御モータ14の回転位置を検出する第1レゾルバ31と、反力補償モータ15と、反力補償モータ15の回転位置を検出する第2レゾルバ32と、制御部と、を備える。制御部の第1判定部は、伝達比制御モータ14が制御部によって所定の回転方向に第1目標角度δ1回転された場合において、第1レゾルバ31の検出値の変化量Δθvgr1と第1目標角度δ1との差が第1基準値θ1を超えているときに、第1レゾルバ31に異常が生じていると判定する。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した目標軌跡になるよう操舵輪の舵角を遅れなく制御する。
【解決手段】運転者の操舵操作量に対する操舵輪の舵角の関係を変更する舵角可変装置又はバイワイヤ式の操舵装置を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する(500)。そして目標舵角に基づいて操舵輪の舵角をフィードフォワード式又はフィードバック式に制御する(600)。
(もっと読む)
車両用操舵装置および車両用操舵装置の異常判定方法
【課題】伝達比をロックするためのロック機構の異常をより正確に検出することのできる車両用操舵装置を提供する。
【解決手段】車両用操舵装置1は、ステアリングシャフト3の入力軸18と出力軸19との間の伝達比を変更可能な伝達比可変機構13と、伝達比を変更するための伝達比制御モータ14と、伝達比を固定するためのロック機構25と、制御部とを備える。ロック機構25は、キャリア57の回転を規制するためのロック部材62と、ロック部材62をキャリア57に係合する第1位置P1と係合しない第2位置P2とに変位可能に支持するソレノイド61と、を含む。制御部の判定部は、ロック部材62を第2位置P2に変位するようにロック機構25が制御された後、ロック部材62が第1位置P1にあるときに、ロック機構25に異常が生じていると判定する。
(もっと読む)
1 - 20 / 303
[ Back to top ]