
Fターム[3D232DE02]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 漸増減 (378)
Fターム[3D232DE02]に分類される特許
1 - 20 / 378
ステアリング装置およびフォークリフト
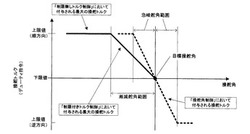
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
電動パワーステアリング装置

【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置において、各部の異常診断を行い、確定した異常である場合は異常確定信号を出力し、不確定異常である場合は異常判断信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置からコントロールユニットに電力を供給して、異常診断を実行する。それぞれに割り当てられた診断時間の間、各部の検出した異常が確定した異常である場合に異常確定信号を出力する異常検出部と、確定に至らない不確定異常を異常検出部が検出した回数であるカウント値を記憶するカウント値記憶部と、カウント値に基づいて、各部に確定した異常が発生する可能性の程度を段階的に判断して異常判断信号を出力する判断部とで構成する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
パワーステアリング装置
【課題】省電力化が図れるとともに、操舵補助力が必要な場合に電動モータの駆動が停止されたり、電動モータの回転速度が低速に制御されたりするのを回避できるパワーステアリング装置を提供する。
【解決手段】電動モータ24が通常モードで駆動制御されている場合において、車速Vsが閾値A1以下でかつ操舵角速度Vhが閾値B1以下でかつモータ電流Imが閾値C1以下の状態が閾値D1で規定される第1の所定時間以上継続したときには、制御モードが省電力モードに切り換えられる。これにより、電動モータ24の目標回転速度Vp*が第1の目標回転速度Vp1*から第2の目標回転速度Vp2*に切り換えられる。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
電動パワーステアリング制御装置
【課題】高次の車輪回転振動を抑制して操舵フィーリングを向上させる
【解決手段】電動パワーステアリングシステム1は、振動抑制補償量演算部22が、電動パワーステアリングシステム1における路面反力に対するモータ6の速度の特性について、基本アシスト量を振動抑制補償量で補正せずにモータ6を駆動させた場合の特性よりも、タイヤ10が1秒間で回転する回転数と一致する周波数(以下、基本車輪速周波数という)の1,2,3,4,5倍に一致する周波数で大きさが振動する路面反力に対してモータの速度が抑制された特性となる仕様を満たすように振動抑制補償量を演算する。これにより、上記仕様を満たすように、ハンドル2の操作を補助するためのアシスト操舵力を制御するため、基本車輪速周波数の2,3,4,5倍に一致する高次車輪速周波数を有する車輪回転振動がタイヤ10からハンドル2に伝達されるのを抑制することができる。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
車両姿勢制御装置
【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】検出コイル、非磁性の円筒部材、センサシャフト部を使用してトルク検出を行う際に、検出コイルへの磁束量を増加させて検出精度を向上させることができるトルクセンサ及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】一対の検出コイル13a,13bの内周面側に所定間隔を保って対向して入力軸及び出力軸の一方に連結された非磁性の円筒部材12を配置し、該円筒部材12の内周面側に、軸方向の凸条11aを円周方向に所定間隔で形成し、前記入力軸及び出力軸の他方に連結されたセンサシャフト部11を配置し、前記円筒部材12は、前記一対の検出コイルに個別に対向し、円周方向に位置を異ならせて形成された前記一対の検出コイルで互い逆方向にインピーダンスを変化させる一対の磁束透過用窓12a,12bを形成し、該一対の磁束透過用窓の軸方向両端部に空気より透磁率の高い磁路部材17を配置した。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
1 - 20 / 378
[ Back to top ]