
Fターム[3D232EB00]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762)
Fターム[3D232EB00]の下位に属するFターム
操舵方向、位相 (137)
操舵角、操舵量 (1,489)
ステアリング伝達比 (600)
不感帯 (36)
時間のずれ、応答性 (34)
中立位置 (123)
操舵力 (2,579)
車両運動状態量 (443)
横すべり角 (80)
コーナリングパワ、コーナリングフォース (43)
スタビリティ・ファクタ (18)
その他 (171)
Fターム[3D232EB00]に分類される特許
1 - 9 / 9
車両運転支援装置
【課題】走行中の運転者に対しカーブミラー内に映った鏡像を見やすくしたり、カーブミラー内における接近物体を自動的に認識して運転者に対する警報や車両制御を可能にしたりして、交差点やカーブでの出合い頭の事故を未然に且つ確実に防止できるようにする。
【解決手段】車両前方を撮像する撮像手段10aと、その前方画像からカーブミラーを認識して特定する特定手段21aと、そのカーブミラーにおけるミラー内画像を取得する取得手段21b(10b,11)と、そのミラー内画像を正面から見た正視画像に変換する画像変換手段21cと、その正視画像に対しミラー周辺部の画像歪み補正を行なう画像歪み補正手段21dと、その補正後正視画像を車両運転者に対し表示する表示手段40(23a)とをそなえる。
(もっと読む)
車両用舵角検出装置及びこれを使用した電動パワーステアリング装置

【課題】システムが停止する直前の絶対舵角の有効性を判断することができる車両用舵角検出装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】システム停止直前に絶対舵角演算手段で演算した絶対舵角を不揮発性メモリ19に記憶する絶対舵角記憶手段41と、システム起動時に不揮発性メモリに記憶された絶対舵角記憶値と相対舵角とにより絶対舵角暫定値を演算する暫定値演算手段35と、絶対舵角暫定値と車両モデルの特性とに基づいてセルフアライニングトルク基準値を演算するセルフアライニングトルク演算手段と、車両の実セルフアライニングトルクを検出する実セルフアライニングトルク検出手段37と、セルフアライニングトルク基準値と実セルフアライニングトルクとの差に基づいて前記絶対舵角暫定値が有効であるか否かを判定する有効性判定手段38とを少なくとも備えている。
(もっと読む)
車両監査装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御の正当性を正しく判定し、機能ドメイン制御手段の冗長系の複雑化を防止する車両監査装置およびそれを用いた車両制御システムを提供する。
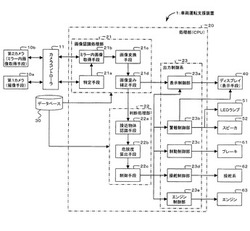
【解決手段】イントラボックス100は、タイヤ70の挙動を制御するステアリング制御装置30およびブレーキ制御装置40とは独立して設置されている。イントラボックス100の挙動情報取得手段210は、各種センサの検出信号等から車両の実際の挙動情報を取得する。監査手段240は、車両の実挙動情報に基づいて、ステアリング制御装置30およびブレーキ制御装置40のタイヤ70に対する挙動制御の正当性を判定する。ステアリング制御装置30およびブレーキ制御装置40による挙動制御が異常の場合、監査手段240は、車両の挙動異常を解消するように、ステアリング制御装置30およびブレーキ制御装置40に対して挙動制御の指令値を出す。
(もっと読む)
車両制御装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御を車両環境に応じて適宜調整し、機能ドメイン制御手段の構成の変更に適応する作業量を低減する車両制御装置およびそれを用いた車両制御システムを提供する。
【解決手段】車両制御装置は、車両が置かれた車両環境に基づいて車両モードを設定し、車両モード毎に、分配する資源と、資源を分配する機能ドメイン制御手段とを決定する(S300)。車両環境は、走行速度、運転者により設定される運転モードである省エネモードおよびスポーツモード等の車両自体に基づいた車両の走行状態と、車両の周囲の天候、走行道路の種別、走行地域、駐車中、車両移送中、盗難等の車両の周辺状況とを表す。車両制御装置は、S300で設定した車両モードを判定し(S302)、車両モードに応じて適切な量の資源を機能ドメイン制御手段に分配する(S304、S306、S308)。
(もっと読む)
キャンバ角制御装置
【課題】走行する車両の安全性を確保することができるキャンバ角制御装置を提供すること。
【解決手段】キャンバ角付与装置4が故障し、前輪2FL,2FRまたは後輪2RL,2RRにおいて双方のキャンバ角が異なると、車両1は、スラスト力の強い方向へ旋回させられるので、車両1の直進性や旋回性が損なわれ安全性が低下してしまう。車両用制御装置100によれば、正常に動作する車輪2のキャンバ角を、異常のある車輪のキャンバ角と等しくなるように制御するので、その結果、双方の車輪2のスラスト力が等しくなり、車両1においてスラスト力が均衡することとなる。すなわち、車両1が旋回させられる力が抑制されるので、車両1の直進性や旋回性が損なわれることを抑制することができる。よって、走行する車両1の安全性を確保することができる。
(もっと読む)
車両状態判定装置、並びに該車両状態判定装置を備えた車両の警報装置及び運動制御装置
【課題】走行路面に対するタイヤとしての特性に従い適切な指標を演算し、その演算結果に基づき車両状態を判定し、その車両状態に応じて適切なタイミングで警報を行い、円滑に車両の安定化制御を行う。
【解決手段】車両状態量検出手段M1の検出車両状態量に基づき、タイヤ横力比演算手段M2にて、走行路面に対するタイヤとしての特性に従い車輪と走行路面間で発生し得る最大横力と車輪に実際に発生している横力との比を「タイヤ横力比」として演算する。限界ヨーレイト演算手段M3にて、タイヤ横力比に基づき車両に発生し得る最大のヨーレイトを演算し限界ヨーレイトとして出力する。検出車両状態量に基づいて目標ヨーレイトを演算し、これと限界ヨーレイトの偏差に基づき、車両の不安定度を表す指標を演算する。
(もっと読む)
前方道路情報送出システム
【課題】 システムが実際に走行制御や警報動作を行わせる実働領域を広げる。
【解決手段】 前方道路情報送出システム1は、自車両の進行方向に分岐点や交差点が存在し、それら分岐点や交差点から先の複数の進行候補道路に対応して複数の前方道路情報を作成した場合であっても、それら作成された複数の前方道路情報が類似しているか否かを判定し、類似している旨を検出すると、複数の前方道路情報のいずれかを走行制御装置8〜11や警報装置12へ送出して走行制御動作や警報動作を行わせる。分岐点や交差点の付近から先の道路に対する走行制御動作や警報動作を行わせることができ、システムが実際に走行制御動作や警報動作を行わせる実働領域を広げることができる。
(もっと読む)
産業車両のステアリング装置
【課題】 操舵輪の旋回の限界位置での衝撃を効果的に緩和することができ、しかも、操舵角を検出するセンサの調整にかかる手間を省くことのできるステアリング装置を提供する。
【解決手段】 操舵輪を旋回駆動する駆動装置を制御する制御装置が、操舵輪の最大操舵角L,Rを設定する最大操舵角設定手段と、最大操舵角L,Rから操舵角が絶対値として小さくなる方向へ所定の角度Bの範囲内に現在の操舵角Aがあるか否かを判定する操舵角判定手段と、操舵輪の操舵される方向が操舵角が絶対値として小さくなる方向か、大きくなる方向かを判定する操舵方向判定手段と、駆動装置を制御する駆動制御手段とを備える。そして、駆動制御手段は、現在の操舵角Aが上記角度範囲内にあると判定され、且つ、操舵される方向が操舵角が絶対値として大きくなる方向であると判定されたときに、操舵輪の旋回する速度が抑制されるよう駆動装置を制御する。
(もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 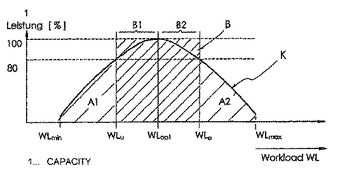 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]