
Fターム[3D232EC00]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276)
Fターム[3D232EC00]の下位に属するFターム
油圧式制御装置 (407)
電動機式制御装置 (3,850)
ステアリング伝達比可変機構 (602)
前後輪舵角比可変機構 (32)
ケーブル式操舵機構 (57)
自動操舵機構に特有のもの (377)
ステアバイワイヤ (693)
その他 (249)
Fターム[3D232EC00]に分類される特許
1 - 9 / 9
車両の挙動制御装置
【課題】目標車両モデルの型式に拘わらずに適用でき、且つフィードバック制御や車体スリップ角の推定を行わずに、フィードフォワード制御により所望の車両挙動を得ることのできる車両の挙動制御装置を提供する。
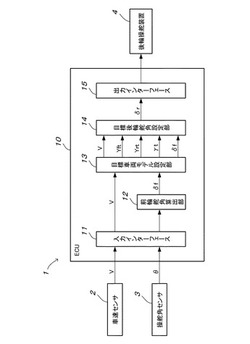
【解決手段】車両の挙動制御装置1において、前輪舵角δfを検出する操舵角センサ3と、車速Vを検出する車速センサ2と、後輪の転舵に供される後輪転舵装置4と、前輪舵角δfと車速Vとに基づき、目標前輪タイヤ横力Yftおよび目標後輪タイヤ横力Yrtを設定する目標タイヤ横力設定部を備えた目標車両モデル設定部13と、目標前輪タイヤ横力Yftと目標後輪タイヤ横力Yrtとに基づき、後輪転舵装置4に転舵させる目標後輪舵角δrtを設定する後輪転舵量設定部14とを備えるように構成する。
(もっと読む)
車両用駐車支援装置、及び車両用駐車支援方法

【課題】車両の後退軌跡が駐車位置までの最適軌跡を容易に維持することができる車両用駐車支援装置を提供する。
【解決手段】車両の駐車支援を行う車両用駐車支援装置であって、車両の後方を撮像する後方撮像部と、車両の駐車位置を認識する駐車位置認識部と、駐車位置認識部が認識した駐車位置までの最適軌跡を算出する最適軌跡算出部と、最適軌跡算出部が算出した最適軌跡の回転半径が前輪のみの操舵による最小回転半径よりも小さい場合、最適軌跡を維持するように、前輪の自動操舵を行うと共に後輪の自動操舵を行う駐車自動操舵部とを備える。
(もっと読む)
車両制御装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御を車両環境に応じて適宜調整し、機能ドメイン制御手段の構成の変更に適応する作業量を低減する車両制御装置およびそれを用いた車両制御システムを提供する。
【解決手段】車両制御装置は、車両が置かれた車両環境に基づいて車両モードを設定し、車両モード毎に、分配する資源と、資源を分配する機能ドメイン制御手段とを決定する(S300)。車両環境は、走行速度、運転者により設定される運転モードである省エネモードおよびスポーツモード等の車両自体に基づいた車両の走行状態と、車両の周囲の天候、走行道路の種別、走行地域、駐車中、車両移送中、盗難等の車両の周辺状況とを表す。車両制御装置は、S300で設定した車両モードを判定し(S302)、車両モードに応じて適切な量の資源を機能ドメイン制御手段に分配する(S304、S306、S308)。
(もっと読む)
走行制御計画生成装置
【課題】ドライバの運転嗜好を反映して車両を自動走行させる走行制御計画を生成することが可能な走行制御計画生成装置を提供する。
【解決手段】走行制御計画生成装置1では、ドライバの運転嗜好それぞれの優先度を優先度入力部104にて受け付け、入力された優先度に応じて、パラメータ値設定部104において走行制御計画生成パラメータの値を設定する。このドライバの運転嗜好を反映させた走行制御計画生成パラメータを用いて、計画生成部106において走行制御計画を生成する。
(もっと読む)
操舵制御装置及び方法
【課題】少なくとも左右の後輪を夫々、相互から独立して操舵可能な車両において、一方の後輪が失陥した場合でも車両の安定性を確保する。
【解決手段】操舵制御装置(1)は、車両における左右の後輪を相互から独立して夫々操舵する左及び右操舵アクチュエータ(40a,40b)と、左右の後輪の舵角を夫々検出する左及び右舵角検出手段(50a,50b)と、車両の速度を検出する車速検出手段(20)と、アクチュエータの異常を検知する異常検知手段(101)と、左右のアクチュエータのうち一方のアクチュエータの異常が検知された場合に、左右の舵角のうち一方のアクチュエータに対応した一方の舵角と車速とに基づいて、左右のアクチュエータのうち他方のアクチュエータが、操舵すべき舵角を算出する演算手段(102)と、算出された舵角で操舵するように、他方のアクチュエータを制御する制御手段(103)とを備える。
(もっと読む)
アクティブステアリング装置の作動をアクティブサスペンション装置により援助する車輌
【課題】より低出力のアクチュエータにより電力消費をよりよく抑制してより高性能のアクティブ操舵を行うことができるアクティブステアリング装置を備えた車輌を提供する。
【解決手段】アクティブステアリング装置とアクティブサスペンション装置とを備えた車輌に於いて、アクティブステアリング装置の作動時にアクティブ操舵される車輪の接地荷重をアクティブサスペンション装置により低減するようアクティブステアリング装置の作動をアクティブサスペンション装置により援助する。
(もっと読む)
車両挙動安定化装置
【課題】車両のオーバーステア状態とともに、アンダーステア状態を検出することができる車両挙動安定化装置を提供する。
【解決手段】実舵角検出手段35と、車速検出手段16と、横方向加速度センサ17と、目標ヨーレート演算手段20と、ヨーレートセンサ18と、車両制御手段29とを備え、目標ヨーレート演算手段20は、第1目標ヨーレートYhdlを演算する第1目標ヨーレート演算手段21と、第2目標ヨーレートYGyを演算する第2目標ヨーレート演算手段22と、目標ヨーレート偏差ΔYを演算する目標ヨーレート偏差演算手段23と、目標ヨーレート偏差ΔYのヨーレート偏差ローパスフィルタ処理手段24と、第3目標ヨーレートYtgtを演算する第3目標ヨーレート演算手段25とを含み、第1目標ヨーレートYhdlと第3目標ヨーレートYtgtとから車両目標ヨーレートYobjを演算する。
(もっと読む)
四輪独立駆動車の制駆動力配分装置
【課題】各輪のスリップやモータの過熱等で特に二輪以上の制駆動力が変化した場合あるいは特に二輪以上の制駆動力を変化させる場合においても、車両挙動の変化をゼロとするような制駆動力の再配分を行う装置を提供する。
【解決手段】四輪(1〜4)を独立に駆動可能な車両において、車両の平面運動での目標となる車両挙動を決定する目標車両挙動決定手段(8)と、この目標となる車両挙動を実現する四輪(1〜4)の制駆動力配分の集合を演算する制駆動力配分集合演算手段(8)と、この演算された制駆動力配分の集合の中から一つの制駆動力配分を選択する制駆動力配分選択手段(8)とを備える。
(もっと読む)
車体構造
【課題】 安価に車両の各部の諸元を変更でき、高強度連結と歪み補正制御により軽量ボディの車両の試験をも可能とした車体構造を提供する。
【解決手段】 サスペンション形式の違い、ホイールベース、トレッド、重量配分、車両重心位置、ロール慣性、ヨー慣性等の車両諸元を異にする複数の分割モジュール10、20、30を組み合わせてなる軽量金属を用いた車体構造において、これら分割モジュール間にモジュールと同材の連結材22から構成される連結部を設けるとともに、前記連結材22に高強度管23を圧入したことにより、車体を構成する分割モジュールをアルミ等の軽量金属から構成した場合でも、分割モジュール間の連結部を高い強度で連結して車体を構成することができる。
(もっと読む)
1 - 9 / 9
[ Back to top ]