
Fターム[3D233CA18]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023) | 車輪の操舵角、操舵量、操舵方向 (888)
Fターム[3D233CA18]に分類される特許
1 - 20 / 888
車両用操舵装置
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
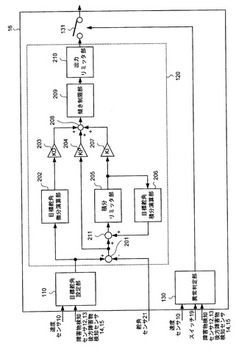
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
操舵制御装置

【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
車両用操舵装置
【課題】簡単な構造で安価に操舵反力を発生できる車両用操舵装置を提供すること。
【解決手段】例えば左操舵される操舵部材2によって伝達機構14を介して第1回転方向X1に駆動された空気圧縮機5が、第1ポート51を吸込口とし、第2ポート52を吐出口とする。空気供給口24からの空気が、吸込口となっている第1ポート51に供給される。吐出口になっている第2ポート52から吐出された圧縮空気は、第2可変絞り20、第2逆止弁18、高圧部16aの分岐部29、上流側還流路30、方向制御弁28および第1下流側還流路32を介して、吸込口となっている第1ポート51に還流される。操舵部材2に、空気圧縮機5の駆動の反力による操舵反力が付与される。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
操舵装置
【課題】車速センサがフェールした場合であっても、操作性および操縦安定性の低下を抑制する。
【解決手段】操舵装置10は、右側操舵入力部20Rと、左側操舵入力部20Lと、車速センサ40と、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に応じて操舵輪RWを転舵する転舵機構12と、ステアリングECU30により検出された車速に基づいて、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に対する操舵輪の転舵角の比である舵角比を設定するステアリングECU30とを備える。ステアリングECU30は、車速センサ40がフェールした場合、右側操舵入力部20Rの操舵角に対する操舵輪RWの転舵角の比である第1舵角比と、左側操舵入力部20Lの操舵角に対する操舵輪RWの転舵角の比である第2舵角比とを異なる値に設定する。
(もっと読む)
操舵装置
【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁制御によって軽快な操舵フィーリングを保持しつつ、弱め界磁制御が有効ではなくなって無駄な発熱が発生する事象を、モータの駆動状況に応じて回避する電動パワーステアリング装置を提供する。
【解決手段】モータの駆動状況に対応するトルク電流であるq軸電流IqがIq=Iq´に設定されたとき、モータ回転数が増加しないで発熱のみが増加するドットを付けた領域135内に電流ベクトルiを設定しないで、ハッチングで示す使用領域134内で、弱め界磁電流であるd軸電流Idが使用領域134の上限値Idlimとなる電流ベクトルkに設定する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム
【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
車両の操舵制御装置及び操舵制御方法
【課題】転舵モータの過熱時に操舵輪と転舵輪とを機械的に結合しても、運転者が負担する操舵トルクの増加を抑制することが可能な、車両の操舵制御装置及び操舵制御方法を提供する。
【解決手段】操舵輪32の操作に基づいて転舵輪24を転舵させる転舵モータ2の温度が、予め設定したクラッチ締結温度を超えているか否かを判定し、転舵モータ2の温度がクラッチ締結温度を超えていると判定すると、操舵輪32と転舵輪24との間のトルク伝達経路を機械的に分離する開放状態にあるクラッチ6を、トルク伝達経路を機械的に連結した締結状態に切り換えた後も、操舵輪32の操作に応じた目標転舵角を算出し、この算出した目標転舵角に応じて転舵トルクを制御する転舵モータ2の駆動制御を継続させる。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
車両用操舵装置
【課題】ステアリングギア比を車速に応じて変化させる場合であっても、ドライバに対し、車速に関係なく適切な操舵量をイメージさせる。
【解決手段】車速Vに基づきステアリングギア比Gおよび転舵角δを算出し(ステップS1、S2)、さらに車速Vおよび操舵角θに応じた操舵反力成分T(V,θ)と、フリクション成分Tfと、操舵角速度θ′に応じた操舵反力成分T(θ′)との和から操舵反力Tを演算し(ステップS3〜S8)、操舵反力成分T(V,θ)を、車速Vが大きいときほど小さな値となる特性とする。車速Vが大きいときほど操舵反力Tは抑制されるため、ステアリングギア比を車速に応じてステアリングギア比が大きくなる特性とした場合でも、ステアリングホイール1に付与される操舵反力は車速に関係なくほぼ同等程度となる。そのためドライバは操舵量をイメージしやすくなり、的確な操舵を行うことができる。
(もっと読む)
1 - 20 / 888
[ Back to top ]