
Fターム[3D233CA27]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | センサの構成と配置 (1,698)
Fターム[3D233CA27]の下位に属するFターム
トルクセンサ (1,067)
操舵回転センサ、操舵角センサ (561)
Fターム[3D233CA27]に分類される特許
1 - 20 / 70
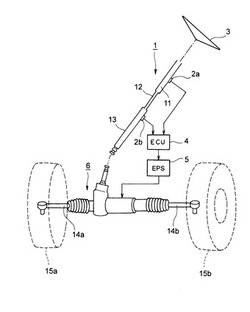
操舵トルク検出方法及び電動パワーステアリング装置
【課題】従来に比して簡易な構成による操舵トルクの検出を可能とする電動パワーステアリング装置を提供する。
【解決手段】運転者のステアリング・ホイール3の操作による操舵トルクを電動モータ7により助勢し、舵取装置6を介して車輪15a,15bへ伝達可能に構成されてなる電動パワーステアリング装置において、ステアリング・ホイール3と舵取装置6との間には、トーションバーン12を挟んで、2つのジャイロセンサ2a,2bが設けられ、2つのジャイロセンサ2a,2bにより検出された角速度ω1,ω2の差の積分値が算出され、その積分値に基づいて所定の演算式により操舵トルクが算出されるよう構成されたものとなっている。
(もっと読む)
パワーステアリング装置

【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
相対角度検出装置、電動パワーステアリング装置および電線保持具
【課題】ハウジング外において電線に力が作用したとしても、電線保持部材における電線保持部、およびハウジング内の電線の端部に大きな力が及ばないようにすることを、簡易な構成で実現できる技術を提供する。
【解決手段】相対角度センサから出力される電気信号をハウジング外に配置される装置に伝送する電線310と、ハウジングに形成された連通孔に嵌合されるとともに電線310を保持するグロメット320と、ハウジングの外側にて連通孔を覆う覆い部を有し、グロメット320が保持した電線310を通す電線孔が覆い部に形成されたプレート330と、ハウジングの外側にて電線310を狭持するクリップ340と、を備え、プレート330には、覆い部の外側にクリップ340が連結される連結孔が形成されており、クリップ340は、電線310の周囲に巻かれることで電線310を狭持する帯部と、プレート330の連結孔に連結されるフック部とを有する。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
回転構造体
【課題】第1回転体と固定部品との間における相対的な移動を規制する回転構造体を提供する。
【解決手段】出力軸30と、検出器332と、クリップ50Dと、を備える回転構造体であって、クリップ50は、検出器332と一体であると共に出力軸30と同軸かつ外側に配置されるリング状の取付部54と、取付部54から軸方向に延び出力軸30の外周面を圧接する複数の圧接片59と、取付部59から軸方向に延びる当接片60とを備え、出力軸30は、その外側に径方向と直交する面である底面36aを備え、当接片60は、側断面視において、その中間が径方向内側に突出し屈曲した第1当接部61を備え、第1当接部61と底面36aとは、クリップ50Dと出力軸30との周方向における相対移動を規制するように、線と面で当接している。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
パワーステアリング装置
【課題】電動モータにおける異音の発生を抑制したパワーステアリング装置を提供する。
【解決手段】モータ回転軸24の一端側にウォームギヤ機構を、他端側にレゾルバ35をそれぞれ設けるとともに、モータ回転軸24のうちモータ回転子36を挟んでレゾルバ35側の部分を第1ボールベアリング46で、モータ回転軸24のうちモータ回転子36を挟んでウォームギヤ機構側の部分を第2ボールベアリング54でそれぞれ回転可能に支持し、第2ボールベアリング54のアウターレースをウェーブワッシャ64によって第1ボールベアリング46側へ付勢することにより、第1ボールベアリング46と第2ボールベアリング54とにそれぞれ予圧を付与する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータ周りの径方向寸法を小型化し得る電動パワーステアリング装置を提供する。
【解決手段】減速機11、電動モータ12、レゾルバ14、バスバー63及びPCB64を、モータ回転軸36の軸方向に沿ってそれぞれ直列に配置すると共に、当該配置にあたり、電動モータ12の軸方向一方側に減速機11を、他方側にレゾルバ14等を配置し、さらに電動モータ12とPCB64との間にバスバー63を、該バスバー63と電動モータ12との間にレゾルバ14を、それぞれ配置するようにした。
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】体格の小型化が図られるトルク検出装置および電動パワーステアリング装置を提供する。
【解決手段】トルクセンサ7は、入力軸21に固定されて所定の軸倍角を有する第1のロータ31と、出力軸22に固定されて第1のロータ31と異なる軸倍角を有する第2のロータ32とを備えてなる。また、第1および第2のロータ31,32の外周面に配設されるステータ30に、第1および第2のロータ31,32の回転にともなうステータ30と第1および第2のロータ31,32間のギャップ変化に応じて位相の異なる電気信号を生成する第1〜第4の出力コイル33a〜33dが配設されてなる。そして、第1〜第4の出力コイル33a〜33dにおいて生成される電気信号に基づき入力軸21および出力軸22の間に連結されるトーションバー23の捩れ角として算出され、当該捩れ角に基づき入力軸21と出力軸22との間に作用するトルクが算出される。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】トルクセンサの高い信頼性を確保しながら磁気バランスのバラツキを抑制することができるトルクセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】回転軸に生じるトルクに応じて互いに逆方向にインピーダンスが変化する複数対の検出コイル13a,13b,14a、14bを有するトルク検出部10と、前記複数対の検出コイルのそれぞれに抵抗体を直列接続して構成される複数組のブリッジ回路と、該複数組のブリッジ回路のそれぞれに交流信号を印加し、当該複数組のブリッジ回路の差分信号に基づいて検出トルクを演算する複数組のトルク演算部とを備え、前記トルク検出部10の周囲に磁気シールド部材18a,18bを配置し、該磁気シールド部材の少なくとも一部が当該トルク検出部を支持する磁気シールド機能を有するハウジング5aに一体成形されている。
(もっと読む)
電動パワーステアリング装置
【課題】入力軸側回転角センサ及び出力軸側回転角センサの異常を即座に検出することができる電動パワーステアリング装置を提供する。
【解決手段】車両の操舵系に設けられたトーションバー2bで連結した入力軸2a及び出力軸2cの回転角を個別に検出する入力軸回転角センサ15及び出力軸回転角センサ16を有するトルク検出手段14と、該トルク検出手段で検出したトルク検出値に基づいて制御され、前記操舵系に対して操舵補助力を発生する電動モータ12とを備え、前記入力軸の回転角を検出して前記操舵系の操舵角を検出する操舵角検出手段13と、前記電動モータのモータ回転角を検出するレゾルバ17と、前記入力軸回転角センサ及び前記出力軸回転角操舵角検出手段の異常を、前記操舵角検出手段で検出した操舵角検出値及び前記レゾルバで検出したモータ回転角検出値に基づいて検出するセンサ異常検出手段20bを備えている。
(もっと読む)
車両用操舵装置
【課題】、遊星ギヤの自転運動に基づいて、伝達比が固定されているか否かを判定できる車両用操舵装置を提供する。
【解決手段】伝達比可変機構13は、入力軸18に連結される入力サンギヤ54と、出力軸19に連結される出力サンギヤ55と、入力サンギヤ54と出力サンギヤ55の双方に噛み合う遊星ギヤ56と、遊星ギヤ56をこの遊星ギヤ56の中心軸線L2回りに自転可能に支持するキャリア57とを含んでいる。また、車両用操舵装置1には、遊星ギヤ56の自転運動を検出する遊星ギヤセンサ35と、検出された遊星ギヤ56の自転運動に基づいて伝達比θ2/θ1が固定されているか否かを判定する操舵制御部38と、が備えられている。
(もっと読む)
回転電機及び電動パワーステアリング装置
【課題】レゾルバセンサの信号線を短くすることができる回転電機を提供する。
【解決手段】回転電機12は、ロータ61及びステータ62を収容する有底円筒形のケース50と、ケース50の開口部を閉鎖し、ロータ61の出力軸を通す蓋部51と、ケース50を挿入可能なケース挿入孔52aを有し、ケース50の外周に取り付け可能で、なおかつ回転電機12をその取付け対象物に取り付けるための外部取付け部52bを有するフランジ部材52と、フランジ部材52に設けられ、回転電機12の駆動を制御する制御ユニット14と、蓋部51の前面側に設けられ、ロータ61の出力軸の回転位置を検出するレゾルバセンサ101と、を有している。制御ユニット14の前面には、レゾルバセンサ101のセンサハーネス104が接続されるセンサコネクタ111が設けられている。
(もっと読む)
制御装置及び制御装置の製造方法
【課題】信頼性の低下を招くことなく、制御基板の小型化及び製造工程の簡素化を図ることができる制御装置及びその製造方法を提供する。
【解決手段】制御装置は、制御回路が実装された制御基板12と、駆動回路が実装されたパワー基板と、制御回路と駆動回路とを電気的に接続するバスバーを保持するとともに制御基板12とパワー基板との間に介在される樹脂成形体14とを備えた。また、樹脂成形体14にピン42を設けるとともに、制御基板12に挿入孔24を形成した。そして、挿入孔24の内周面にランド51を設けるとともに、ピン42におけるランド51と対向する部位に金属材料からなる半田付け部53を設け、半田付け部53をランド51に半田54によって接続することにより、制御基板12を樹脂成形体14に対して固定した。
(もっと読む)
回転角センサ、モータ、回転角検出装置、及び電動パワーステアリング装置
【課題】簡素な構成にて高精度の回転角検出が可能であるとともに磁極数の変更に対しても高い柔軟性を有する磁気式の回転角センサを提供すること。
【解決手段】回転角センサは、周方向に沿って複数の磁極が形成されたマグネットロータと、そのマグネットロータの同心円上に均等角度間隔で配置された3つのセンサデバイス33とを備える。また、各センサデバイス33は、スピン固定層の磁化方向が逆向きとなるように直列接続された一対のスピンバルブ型磁気抵抗素子37a,37bを有する3つのハーフブリッジ回路38(38u,38v,38w)を備える。そして、各センサデバイス33は、そのマグネットロータの回転に伴う磁束変化に基づき各ハーフブリッジ回路38が出力するセンサ信号Vu,Vv,Vwが、互いに電気角で120°の位相差を有するように構成される。
(もっと読む)
電動パワーステアリング装置用モータ装置
【課題】この発明は、ベアリングから延出する回転軸の軸端のカップリング部とベアリングとの間の長さを短くし、信頼性の高い、小型で低コストの電動パワーステアリング装置用モータ装置を得る。
【解決手段】ブラシレスモータ25の回転子26の回転軸27の一端側が、制御装置収納空間100内を挿通して、制御装置収納空間100を構成する第1ハウジング11の基部12の一面側に設けられた第1ベアリングボックス16に保持された第1ベアリグ17に支持され、他端がモータ収納空間101を構成するモータフレーム15に設けられた第2ベアリングボックス21に保持された第2ベアリング22に支持されている。制御装置が制御装置収納空間100内に配設され、第1ベアリング17から延出する回転軸27の端部がカップリング部27aとなる。
(もっと読む)
車両挙動センサの中点補正方法
【課題】中点学習を必要とし、車両走行中に中点学習を実施する車両挙動センサの誤学習の発生を抑制できる中点補正方法を提供する。
【解決手段】車両挙動センサの中点補正方法は、車両挙動センサの出力値から中点補正値が順次算出される中点補正算出工程と、中点補正値として略同等の値が連続して算出された場合には中点補正が実施され、前回の中点補正値と今回の中点補正値とが異なる場合には中点補正が実施されない中点補正判定工程とを有する。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】運転者の運転操作に応じて適切に運転支援を行うことができる車両用運転支援装置及び車両用運転支援方法を提供する。
【解決手段】運転者の運転操作と自車両の走行環境とを検出し、検出した運転操作が自車両の走行環境に応じた運転目的(前方物体との接触回避など)を達成不可能な運転操作であるとき、当該運転目的を達成するための運転操作支援力を発生するべく、操作支援アクチュエータを駆動制御する。ここでは、操舵および制動の少なくとも一方により運転操作支援を行う。
(もっと読む)
車両用操舵装置
【課題】クラッチ解放時にはアーマチュアとロータが接触し、クラッチ締結時にはアーマチュアと外輪が接触することになって、クラッチの解放・締結時に金属同士の接触音が発生してしまい、この接触音が乗員に不快感を伴う違和感となってしまうことが避けられなかった。
【解決手段】クラッチ11の作動を確認するクラッチ診断部103による診断を、車両の運転者が車内に存在しないことを検出した場合に、開始する。
(もっと読む)
1 - 20 / 70
[ Back to top ]