
Fターム[3D244AA00]の内容
定速走行制御 (7,912) | 目的 (1,793)
Fターム[3D244AA00]の下位に属するFターム
車速設定 (510)
定速走行制御の解除 (99)
定速走行制御の禁止 (24)
定速走行制御の復帰(リジューム) (62)
省燃費 (79)
操作の容易化、自動化 (147)
危険回避、安全性向上 (673)
変動、ショック防止 (38)
制御精度、応答性の向上 (145)
構成部材の改良 (8)
Fターム[3D244AA00]に分類される特許
1 - 8 / 8
車両駆動ユニットの制御装置
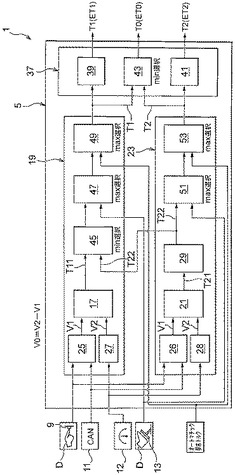
【課題】クルーズモード実行中に異常トルクが検出されたとき、自動的且つ安全に適切なクルーズトルク調整。
【解決手段】異常トルクを検出する第1トルク判定部17を有する第1のモジュール19と、第1のモジュール19とは独立且つ併行して異常トルクを検出する第2トルク判定部21を有する第2のモジュールとを含んだ制御手段5を備え、第1のモジュール19には、目標車速設定部25と実車速検出部27が備えられており、第2のモジュールには目標車速設定部26と実車速検出部28に加えて、目標車速V1と実車速V2との差分V0を計測し、差分V0に対応したトルク制限率Sと当該トルク制限率Sに基づいた第2算出トルクT22とを算出するトルク制限率算出部29が備えられており、制御装置5には差分V0が第1データ範囲を越えたとき、トルク制限率Sに基づいて最終的な出力トルクを設定するトルク設定部37が備えられている。
(もっと読む)
田植機のエンジン回転数制御装置

【課題】植付作業中に一時的に走行抵抗(作業抵抗)が大きくなった場合でも、エンスト等のエンジントラブルを防止する田植機のエンジン回転数制御装置を提供する。
【解決手段】エンジン5と、無段変速装置21と、スロットルレバー85と、変速アーム47と、変速ペダル16と、エンジン回転数制御装置95を備えた田植機1において、変速ペダル16の位置を検出する第一検出手段55と、スロットルレバー85を操作する回転数変更アクチュエータ88と、変速アーム47を操作する変速アクチュエータ60と、エンジン5の出力負荷を検出するエンジン出力負荷検出手段90と、制御装置80とを備え、制御装置80は、エンジン出力負荷検出手段90の検出結果によりエンジン5の出力負荷が所定値以上の時、変速ペダル16の変速操作量に応じたエンジン5の回転数に維持するようにスロットルレバー85を制御する田植機1のエンジン回転数制御装置である。
(もっと読む)
車両の走行制御装置及び走行制御方法
【課題】ナビゲーション装置と自動加速/減速機能とを備えた車両のカーブ走行時の減速運転を利用して、弱っているバッテリを回復させる。
【解決手段】ナビゲーション装置と自動加速/減速機能とを備えた車両において、ナビゲーション装置が持つ地図情報に含まれるカーブ情報から、走行中の車両前方に減速すべきカーブが存在するか否かを検出し、存在する場合に、車両状況及び車両の外部環境を検出し、カーブ情報から車両のカーブ走行時の目標車速を算出して算出車速と現在の車速との偏差から車両のカーブ進入時の減速量を算出し、運転環境検出部が検出したバッテリ状態に応じて、減速量を達成する車両の減速開始地点を算出する車両の走行制御装置である。バッテリが弱っている時にカーブ通過時の減速運転時間を長くしてバッテリの充電量を増大させる。
(もっと読む)
車両の制御装置
【課題】 ブレーキ振動あるいは異音の発生を防止もしくは抑制するための制御が行われる際に、車両の走行状態が変化して乗員に違和感を与えてしまうことを回避できる車両の制御装置を提供する。
【解決手段】 乗員の操作と独立して制動装置を制御して各車輪の制動トルクを設定する制動トルク設定手段と、制動装置の振動を検出する振動検出手段(ステップS101)とを備え、制動装置の振動が検出された場合に振動を抑制する車両の制御装置において、乗員の操作と独立して動力源の出力を制御して各車輪の駆動トルクを設定する駆動トルク設定手段と、車両の走行状態を検出する走行状態検出手段(ステップS102)と、制動装置の振動が検出された場合に、走行状態に基づいて制動トルクと駆動トルクとの少なくともいずれか一方を変更する振動抑制手段(ステップS104,S105)とを備えている。
(もっと読む)
ハイブリッド車両の定速走行制御装置
【課題】 定速走行制御中、ドライバーや乗員に対し、選択した走行モードに応じたエンジン排気音質により選択モードを体感することができるハイブリッド車両の定速走行制御装置を提供すること。
【解決手段】 駆動源にエンジン301と駆動用モータ303を備えると共に、ドライバーのスイッチ操作に基づき定速走行制御を行う定速走行制御手段を備えたハイブリッド車両の定速走行制御装置において、エンジン排気音質の異なる走行モードをドライバーが選択する走行モード選択手段を設け、前記定速走行制御手段は、定速走行制御中、ドライバーが選択する走行モードが静かなエンジン排気音を得たいモードであるほど、総要求トルクに対するエンジントルク配分比率を小さくしモータトルク配分の比率を大きくする手段とした。
(もっと読む)
車両交通量の安定化制御のための方法及び装置
【課題】 高速道路ないし鉄道軌道等の自動車ないし車両交通において格別の障害物の存在しない場合でも発生しうる渋滞現象を改善するための方策であって、運転者が有効かつ安全に制御に組み入れられる方策を提案する。
【解決手段】 マンマシン系として作業を分担させ、車間距離ならびに速度制御機能を運転者に行わせる一方で、車間距離列安定化のための制御量を自動計算し、各車で加算配合して加える方法及び装置を提供する。車間距離の安定化は、先行車からの加減速情報を適切に積算し後方にリレー伝達させる分散制御法で実現される。これにより、車間距離計測そのものを要求せずに車間距離列の安定化が可能になり、装備化も容易で、運転者が局所制御を依然担えるために安全性が確保できる方式が実現できる。本制御は車間制御であり、またその結果として得られる渋滞解消を含む交通量の安定化制御法である。
(もっと読む)
車両のオートクルーズ装置
【課題】車両の加減速を行う車両のオートクルーズ装置において、タイヤの空気圧が低下している場合に該タイヤの劣化を抑制する。
【解決手段】車両1の走行状態が所定の目標走行状態となるように車両1を加減速させる加減速制御を行う加減速制御部30aを備える車両のオートクルーズ装置であって、車両1の少なくとも1つのタイヤ19aの空気圧に関する値を検出する空気圧センサ70aと、空気圧センサ70aの検出結果に基づいて、少なくとも1つのタイヤ19aの空気圧が所定の低下状態になったことを判定する空気圧低下判定部30bと、をさらに備え、加減速制御部30aは、空気圧低下判定部30bにより少なくとも1つのタイヤ19aの空気圧が所定の低下状態となったと判定されたときに、加減速制御における加速を中断する。
(もっと読む)
他車両検出装置及び車間距離制御装置
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
1 - 8 / 8
[ Back to top ]