
Fターム[3D244AA24]の内容
Fターム[3D244AA24]の下位に属するFターム
追突防止、車間距離保持 (389)
急加減速、暴走防止 (38)
システムのフェイルセーフ (12)
検出部の信頼性向上 (18)
故障診断 (3)
警報 (134)
誤操作対策 (14)
Fターム[3D244AA24]に分類される特許
1 - 20 / 65
車両用走行制御装置
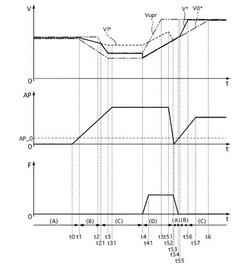
【課題】 ドライバの加速意図を反映しつつドライバの違和感を抑制することができる車両走行制御装置を提供すること。
【解決手段】 車両がカーブ路を走行する際、カーブ路の曲率に基づいて算出された目標車速V0*となるように車両を加減速制御し、加減速制御中にドライバのアクセルペダル操作が検出されると、検出されたアクセルペダル操作量(アクセル開度AP)に基づいて目標車速V0*を修正するとともに、目標車速V0*により発生する車両の横加速度αyよりも大きい横加速度を許容する許容車速Vuprよりも高くならないように目標車速V*を制限し、目標車速V*の制限中に許容車速Vuprが上昇した場合、アクセルペダルの操作反力Fを発生させると共に、アクセルペダル操作が検出されなくなるまで、加減速制御における車両の加速度を、許容車速Vuprを実現する加速度αy'よりも小さくなるように制限する。
(もっと読む)
自動走行制御装置

【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
車両用運転支援装置
【課題】先行車のみならず自車走行路上に存在する信号機に対しても制御対象を拡張して好適な走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4で停止指示信号機が認識されているとき、当該停止指示信号機の停止位置Pstpに自車両1を停止させるための信号機用目標加速度asigを演算し、追従走行用目標加速度acarが演算されていない場合であって信号機用目標加速度asigが演算されている場合には信号機用目標加速度asigを追従走行用目標加速度acarとして代用し、追従走行用目標加速度acar及び信号機用目標加速度asigが演算されている場合であって信号機用目標加速度asigが追従走行用目標加速度acarよりも小値である場合には信号機用目標加速度asigの値を追従走行用目標加速度acarとして代用する。
(もっと読む)
車両の運転支援装置
【課題】停止保持制御から追従走行制御への移行を違和感なく実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、停止中の前記先行車との車間距離Lが大値側に変化したとき車間距離Lの変化に伴って大値側に更新される第1の閾値Dth1と、先行車の車速Vfが高くなるほど大値側に変更される第2の閾値Dth2とを演算し、これらの何れか大きい値に基づいて前記判定閾値Dthを可変設定する。
(もっと読む)
車両の運転支援装置
【課題】停止時に意図しないタイミングで自車両が前進することを的確に防止して違和感のない運転支援を実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、操作入力からの経過時間tがドライバの操作入力直後を判定するキャンセル判定時間Tth1よりも長いことを判定し、且つ、先行車が設定車速Vth未満となる停止或いは略停止状態にあると判定したとき発進許可をキャンセルする。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両用追従走行制御装置
【課題】 車両用追従走行制御装置において、自車が先行車の発進に追従して自動的に発進する機能を備えていると運転者が誤認するのを防止する。
【解決手段】 停止した先行車Vbに追従して停止しようとした自車Vaの減速中に先行車Vbが発進した場合、自車Vaが先行車Vbに追従してそのまま加速すると、運転者は自車が自動発進機能を備えていると誤認する可能性がある。そこで先行車Vbの停止位置に仮想先行車Vb′を設定することで、実際の先行車Vbが発進した場合でも、停止中の仮想先行車Vb′に追従して自車Vaを一旦停止させる。その結果、運転者が発進スイッチを操作して発進意思を示すまで自車Vaは発進することがなくなり、自車が自動発進機能を備えていると運転者が誤認するのを防止することができる。
(もっと読む)
車両制御装置、車両、及び車両制御プログラム
【課題】追従走行中における先行車と追従車の接触や衝突を回避する。
【解決手段】追従車1は、先行車2の走行軌跡を記憶するが、先行車2が直線経路から所定量以上離れた場合にその地点を記憶する。また、追従車1は、追従走行の開始要求を受けた際に、追従車1、目標点T、先行車2が追従走行を開始するのに安全な位置関係にあることを確認してから追従走行を開始する。更に、追従車1は、追従走行中も追従車1、目標点T、及び先行車2の位置関係から追従車1と先行車2が接触、あるいは衝突しないか監視し、これらの可能性がある場合には追従車1を停止させる。加えて、追従車1は、先行車2の実際の現在位置Lpではなく、直進経路上に先行車2の現在位置Lpに対応する先行車相当位置Lp’を仮想的に設定することにより、先行車2のふらつきが追従車1の追従制御に影響するのを抑止する。
(もっと読む)
車両用減速制御装置及び車両用減速制御方法
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
車両用走行制御装置
【課題】運転者の運転特性に応じてより違和感の無い車両の走行制御を行うことができる車両用走行制御装置を提供する。
【解決手段】運転者の減速意思を検出するドライバ操作状態検出部26、アクセル操作検出部28、ブレーキ操作検出部29と、システム作動距離Lthと減速意思距離Ldとの偏差を距離偏差として算出するとともに該安全装置の作動対象となるカーブ曲率と距離偏差とを対応付けて運転特性として記憶する運転特性記憶部37と、新たに検出されたカーブ曲率と運転特性記憶部37に記憶されている運転特性とに基づいて安全装置の作動タイミングを変更する適正車両状態変更部36とを備えたことを特徴とする。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速Vを検出する車速検出手段2aと、自車両と先行車両との車間距離Lを検出する車間距離検出手段2bと、車速Vを設定車速VSに制御する及び車間距離Lを車速Vで除して算出された車間時間Tを設定車間時間TSに制御する車両制御手段2cと、自車両の後側方の他車両を検出する後側方検出手段2dと、車間距離Lが車線変更を行うために必要な所定車間距離LC以下となった場合で、後側方検出手段2dが自車両の後側方の他車両を検出しない場合に、車線変更時期を報知する報知手段2eを備えることを特徴とする。
(もっと読む)
汚れ判定装置
【課題】レーダセンサのレーダ波受信面の汚れを精度良く判定する汚れ判定装置を提供する。
【解決手段】監視対象周波数領域から抽出した監視対象ピークの電力値を、変調区間毎かつ受信チャンネル毎に算出し、変調区間毎に、電力値が最大となる最大チャンネルに対する各受信チャンネルの電力値の偏差(チャンネル偏差)を算出する(S210〜S250)。算出したチャンネル偏差に従って、各受信チャンネルに対応付けられた前判定値CPをカウントすると共に、車速Vが下限車速Vth以上、かつ受信チャンネルの中に前判定値CPが前判定閾値CPth以上のものが存在する場合に、車速Vに応じて算出される更新値Kにより汚れ判定値CDを更新し、その汚れ判定値CDが汚れ判定閾値CDth以上であれば、レーダ波の受信面に汚れが生じていることを表すダイアグ情報をONにする(S260〜S320)。
(もっと読む)
車両走行速度制御装置および方法
【課題】車両の操舵角、ヨーレート、および車両の前方道路の情報を予め検出し、曲線路の進入または進出の際に車両の速度を制御して車両の安全性と乗車感を向上させることが可能な、車両走行速度制御装置およびその方法の提供。
【解決手段】車両の前方道路を撮影して映像データを取得し、前記映像データからカルマンフィルターを用いて前方道路情報を抽出する前方映像センサーと、前記前方道路情報を用いて車両の走行に必要な速度を計算する制御部と、前記計算された車両の速度に応じて車両の走行動作を調節する駆動部とを含んでなる、車両走行速度制御装置。
(もっと読む)
車両走行制御装置
【課題】異常が発生することで、異常な目標制御量に基づいて車速調整装置が制御されることを抑制することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1−1では、自動走行制御ECU7において車速Vが予め設定された目標車速Voとなるように目標駆動力Foを算出し、エンジンECU8においてエンジンECU8に出力された目標駆動力Foに基づいてエンジン100を制御する。エンジンECU8は、運転者による制動操作を検出した場合、自動走行制御ECU7において予め設定された車速Vを低速目標車速Volとすることができる低速上限値FL2以下となるように算出された目標駆動力FoがエンジンECU8において予め設定された車速Vを低速目標車速Volとすることができる基準低速上限値FL2´を超えると判定する場合、目標駆動力Fo制御量に基づいた自動走行制御を行わない。
(もっと読む)
作業車両の車速制御装置
【課題】
本発明は、大きな負荷がかかることによって車速が目標車速に到達しない状態から負荷が抜けた状態に移行した時点で生じる急加速を防止し、それによるショックを低減したり操作感覚の違和感を取り除くことが可能な作業車両の車速制御装置を提供する。
【解決手段】
作業車両のアクセル手段の操作量を検出する操作量検出手段、作業車両の実車速を検出する実車速検出手段、作業車両の負荷を計測する計測手段、操作量検出手段で検出された操作量に対応する目標車速を設定し、計測手段で計測された負荷に応じて、目標車速と作業車両の実車速との偏差が零になるように車速を制御する第1の制御又は目標車速を実車速に応じた低い値に補正し、該補正された補正目標車速と実車速との偏差が零になるように、作業車両の車速を制御する第2の制御を行うコントローラとを備える。
(もっと読む)
車両制御装置及び車両制御方法
【課題】車両に内外に関する情報に対し適切な制駆動制御を行うこと。
【解決手段】本発明は、車両内外に関する情報に基づき、車両内外に関する情報とは別の車両外に関する情報を取得する複数の取得手段20のうち1つの取得手段を選択する選択手段14と、取得手段20が取得した車両外に関する情報に基づき、車両を制動または駆動する制駆動手段30を制御する制駆動制御手段16と、を具備する車両制御装置及び車両制御方法である。
(もっと読む)
車両の速度制御システム、及び速度制御方法
【課題】車両の自動速度制御において、道路勾配及び車両質量の両者に配慮した速度制御を行う。
【解決手段】車両の速度制御システムは、車両に加わる力であって車両の安定走行が可能とされる力の限界である限界値を記憶する限界値記憶手段と、道路勾配を算出する勾配算出手段と、車両質量を算出する質量算出手段と、前記道路勾配と前記車両質量と前記限界値とを用いて、車両速度を決定する車両速度決定手段とを備える。
(もっと読む)
1 - 20 / 65
[ Back to top ]