
Fターム[3D244AB01]の内容
Fターム[3D244AB01]に分類される特許
1 - 20 / 501
車両の走行制御装置
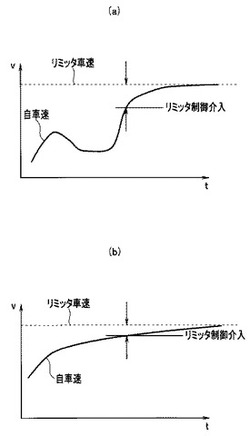
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両の走行制御装置

【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
車両用走行制御装置
【課題】 ドライバの加速意図を反映しつつドライバの違和感を抑制することができる車両走行制御装置を提供すること。
【解決手段】 車両がカーブ路を走行する際、カーブ路の曲率に基づいて算出された目標車速V0*となるように車両を加減速制御し、加減速制御中にドライバのアクセルペダル操作が検出されると、検出されたアクセルペダル操作量(アクセル開度AP)に基づいて目標車速V0*を修正するとともに、目標車速V0*により発生する車両の横加速度αyよりも大きい横加速度を許容する許容車速Vuprよりも高くならないように目標車速V*を制限し、目標車速V*の制限中に許容車速Vuprが上昇した場合、アクセルペダルの操作反力Fを発生させると共に、アクセルペダル操作が検出されなくなるまで、加減速制御における車両の加速度を、許容車速Vuprを実現する加速度αy'よりも小さくなるように制限する。
(もっと読む)
走行制御装置
【課題】車両が停止する直前、または発進直後のような低速時でも正確な追従制御が可能な走行制御装置を提供する。
【解決手段】入力された自車両の前方を走行する先行車と自車両との車間距離情報と、入力された車輪速検出部で検出された自車速情報と、に基づいて、目標加速度を算出する目標加速度算出部と、目標加速度算出部で算出した目標加速度に基づいて先行車両に追従するように制御する制御部と、を有し、目標加速度算出部は、車輪速検出部で検出した自車速から算出した自車両の加速度と、3軸加速度検出部で検出された車両の進行方向の加速度と、に基づいて、目標加速度を決定する。
(もっと読む)
車両用報知装置及び追従走行制御システム
【課題】追従走行の追従先の先行車のドライバが、自車が追従先として選択されていると知ることができるようにする。
【解決手段】後続車に搭載された無線通信装置7から車車間通信によって送信される、自車を追従走行の追従先と選択していることを示す追従先選択情報を取得した場合に、自車が当該後続車の追従走行の追従先に選択されていることをユーザに認識させるための被捕捉通知情報の表示を表示装置10に行わせる。
(もっと読む)
速度表示装置及び速度表示方法
【課題】オートクルーズ走行時、設定速度と車両速度の差である領域が視認し易くなる速度表示装置及び速度表示方法を提供する。
【解決手段】オートクルーズが設定されている場合、CPU15は、現在の速度データを取得し、表示パネル11に表示された速度計30に指針指示位置43を表示させる(S2)。CPUは、設定速度キー19bにより入力された設定速度を取得し、内蔵するRAMに格納するとともに、表示パネル11に表示された速度計30に設定速度位置41を表示させる(S3)。CPU15は、現在の車両速度と設定速度の差をもとに、ゾーン領域45の表示位置およびサイズを計算し、さらに、その色合いや濃度を決定し、表示パネル11に表示された速度計30の外周にゾーン領域45を表示させる(S4)。このゾーン領域45の表示では、設定速度位置41に近いほど、モノクロ表示の濃淡が濃くなっている。
(もっと読む)
画像表示式速度計
【課題】目標速度の設定の際、その設定を行う運転者に及ぼす、情報の認知に要する負荷を軽減する。
【解決手段】速度情報を速度スケール(41)上で表示する画像表示式速度計(100)は、目標速度の設定中には、設定中の目標速度情報を表示する速度位置マーク(42)が液晶表示器(113)に出力され、目標速度の設定後には、速度位置マーク(42)の代わりに設定した目標速度情報を表示するオートクルーズマーク(43)が出力される。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
先行車追従走行制御装置及び先行車追従走行方法
【課題】先行車追従走行中において、渋滞状況以外で並走する側方車両が存在する状況の場合では、運転者によって選定された車間設定方法で設定される目標車間距離に固執せずに、自車両が側方車両の運転手の死角に入らない様に目標車間距離を一時的に柔軟に変更することができる先行車追従走行制御装置及び先行車追従走行方法を提供する。
【解決手段】目標車間距離設定部14で、自車両が渋滞状況にあるときを除いて、周辺車両状況の安全性の高低を左側並走車の有無と右側並走車の有無に基づいて判定すると共に、この判定で安全性が低いと判定された場合に、車間設定選択部13で選択された車間設定方法(i=n)で設定される目標車間距離Dnより長い並走時目標車間距離DLに変更する。
(もっと読む)
走行制御装置
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車間距離自動可変システム及びその方法
【課題】道路が乾いた状態か、雨や雪に濡れた状態かを判断し、道路の状態に従い前車との距離を自動可変することができる車間距離自動可変システム及びその方法を提供する。
【解決手段】 本発明は、車両前方の道路を撮影するカメラと、前記カメラを介し撮影された原本映像データに対し、予め定められた映像処理を行った標準映像データを利用して道路状態を判断した後、その判断結果に対応して車間距離を制御する制御部とを含み、 前記制御部は、前記標準映像データから雨水の帯又は白色成分が検出される場合、濡れた状態の道路と判断し、濡れた状態における車間距離を、前記乾いた状態における車間距離より長く設定することを特徴とする。
(もっと読む)
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
運転支援装置
【課題】燃費を向上させるための車両の運転支援装置を提供する。
【解決手段】自車両のアクセル開度を検出する手段と、アクセル開度の時系列データに基づいて、該アクセル開度の自己相関関数を算出する手段136と、自己相関関数の値に基づき、自車両のアクセル操作の周波数を算出する手段137と、自車両の加速度を検出する手段と、加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段131と、パワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133と、を備える、燃費を向上させるよう車両の運転を支援するための装置である。この装置は、アクセル操作の周波数が所定値よりも低く、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
車両の駆動装置
【課題】車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両用運転支援装置
【課題】先行車のみならず自車走行路上に存在する信号機に対しても制御対象を拡張して好適な走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4で停止指示信号機が認識されているとき、当該停止指示信号機の停止位置Pstpに自車両1を停止させるための信号機用目標加速度asigを演算し、追従走行用目標加速度acarが演算されていない場合であって信号機用目標加速度asigが演算されている場合には信号機用目標加速度asigを追従走行用目標加速度acarとして代用し、追従走行用目標加速度acar及び信号機用目標加速度asigが演算されている場合であって信号機用目標加速度asigが追従走行用目標加速度acarよりも小値である場合には信号機用目標加速度asigの値を追従走行用目標加速度acarとして代用する。
(もっと読む)
車両用運転支援装置
【課題】道路上の制限速度が変化した場合のセット車速の変更を、ドライバの意思を尊重しつつ容易に行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4でセット車速Vsetと異なる制限速度Vlimを検出したとき、セット車速Vsetの値を制限速度Vlimに切換可能なスタンバイモードを一時的に実行し、スタンバイモードの実行中はセット車速Vsetと制限速度Vlimとを対比可能に表示するとともに、ドライバの操作状態に応じてセット車速Vsetの維持或いは制限速度Vlimへの切換を選択的に行う。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】道路状況に応じた設定車速を設定する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制する。制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する。
(もっと読む)
1 - 20 / 501
[ Back to top ]