
Fターム[3D244AC28]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 加減速度 (113)
Fターム[3D244AC28]に分類される特許
1 - 20 / 113
走行制御装置
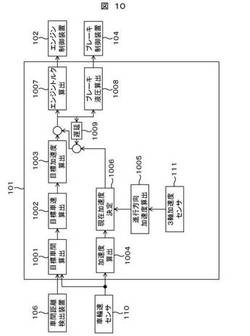
【課題】車両が停止する直前、または発進直後のような低速時でも正確な追従制御が可能な走行制御装置を提供する。
【解決手段】入力された自車両の前方を走行する先行車と自車両との車間距離情報と、入力された車輪速検出部で検出された自車速情報と、に基づいて、目標加速度を算出する目標加速度算出部と、目標加速度算出部で算出した目標加速度に基づいて先行車両に追従するように制御する制御部と、を有し、目標加速度算出部は、車輪速検出部で検出した自車速から算出した自車両の加速度と、3軸加速度検出部で検出された車両の進行方向の加速度と、に基づいて、目標加速度を決定する。
(もっと読む)
車両用報知装置及び追従走行制御システム

【課題】追従走行の追従先の先行車のドライバが、自車が追従先として選択されていると知ることができるようにする。
【解決手段】後続車に搭載された無線通信装置7から車車間通信によって送信される、自車を追従走行の追従先と選択していることを示す追従先選択情報を取得した場合に、自車が当該後続車の追従走行の追従先に選択されていることをユーザに認識させるための被捕捉通知情報の表示を表示装置10に行わせる。
(もっと読む)
先行車追従走行装置及び運転支援システム
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
車両用制御装置及び車両用制御方法
【課題】適切なタイミングで自動停止後のエンジンを再始動させることが可能な車両用制御装置及び車両用制御方法を提供する。
【解決手段】エンジン制御部80は、エンジンの自動停止条件を満たす場合にエンジンを自動停止させると共に、エンジンが自動停止された後に再始動条件を満たす場合にエンジンを再始動させる。ブレーキ油圧制御部70とエンジン制御部80とは、先行車両の追従状態において自車両の停止条件を満たす場合に先行車両に追従して自車両を自動停止させると共に、自車両の発進条件を満たす場合に先行車両に追従して自車両を自動発進させる。また、先行車状態演算部20は、先行車両の加速度を検出し、先行車追従制御部60は、検出された加速度に基づいて、自車両を自動発進させる際の発進目標加速度を演算する。エンジン制御部80は、演算された発進目標加速度を再始動条件の1つとし、再始動条件を満たす場合にエンジンを再始動させる。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車両制御装置
【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
運転支援装置
【課題】燃費を向上させるための車両の運転支援装置を提供する。
【解決手段】自車両のアクセル開度を検出する手段と、アクセル開度の時系列データに基づいて、該アクセル開度の自己相関関数を算出する手段136と、自己相関関数の値に基づき、自車両のアクセル操作の周波数を算出する手段137と、自車両の加速度を検出する手段と、加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段131と、パワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133と、を備える、燃費を向上させるよう車両の運転を支援するための装置である。この装置は、アクセル操作の周波数が所定値よりも低く、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
走行制御装置
【課題】不要な加速を抑制するとともに、先行車両に対して安定して追従することができる走行制御装置を提供する。
【解決手段】本発明に係る走行制御装置1は、自車両が走行している車線上で、自車両の最も近くに存在する先行車両の走行状態を判定する先行車両走行状態判定部21と、先行車両走行状態判定部21によって判定された先行車両の走行状態に基づいて、加速度の制限値を設定して自車両の走行制御を行う走行制御部22と、を備える。
(もっと読む)
車両制御装置
【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
他車認識システム
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
運転支援システム
【課題】車体速度を所望の速度に維持するよう制御する車速制御が不意に解除されてしまうことを防ぐこと。
【解決手段】アクセルペダルの操作量が増加した後に、ユーザが車速制御の開始を所望すると判定するために予め設定された「車速制御開始範囲」内となった場合には開始指示をエンジンECU2へ出力する。車速制御の実行中に、アクセルペダルの操作量が、ユーザが車速制御の継続を所望すると判定するために予め設定された、車速制御開始範囲を包含する「車速制御継続範囲」内にある場合には解除指示をエンジンECU2へ出力せず、一方、アクセルペダルの操作量が車速制御継続範囲内にはなくなった場合には解除指示をエンジンECU2へ出力する。車速制御継続範囲が車速制御開始範囲を包含するので、何らかの要因でアクセルペダルの操作量が変化しても、操作量が車速制御継続範囲にある限りにおいては車速制御が解除されない。
(もっと読む)
車間距離制御装置
【課題】自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とする。
【解決手段】自車の停止保持制御中に先行車が発進したとき、先行車車速推定部12で先行車の車速と加速度とに基づいて発進から所定時間後の先行車の車速を推定し、ACC目標車速設定部13で先行車と自車との車間距離及び先行車の推定車速に基づいて追従走行の目標車速を設定する。そして、ACC再セット可否判定部14で目標車速を判定閾値と比較し、目標車速が判定閾値を超えているとき、ドライバのスイッチ操作入力によるACCの再セット許可と判定し、目標車速が判定閾値以下のときには、ACC再セット禁止と判定する。これにより、自車の停止保持制御中に先行車が発進した場合、先行車の発進状態に応じて追従走行制御の再開を可能とすることができる。
(もっと読む)
追従対象車特定装置
【課題】 追従対象車両と他の車両が近接している場合であっても、追従対象車両を精度よく特定することを可能とした追従対象車特定装置を提供する。
【解決手段】 車々間通信機30で取得した周辺車両情報と、レーダ装置41で取得した前方車両の車両情報とを追従走行ECU10が比較することで、追従対象車両を特定する追従対象車特定装置であって、車々間通信機30で取得した他車両の速度とレーダ装置41で取得した前方車両の速度とを自車両進行方向の速度成分で比較することにより、追従対象車を特定する。
(もっと読む)
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車速制御装置
【課題】路面の摩擦係数が低い状況で車速制御を行う場合に、制駆動力制御が頻繁に繰り返されることを防止し、路面状況に応じた適切な車速制御を行う。
【解決手段】車速制御装置は、運転者などにより設定された設定速度を超えないように車両の速度を制御し、一旦設定された設定速度を変更する手段を備える。制駆動力制御は、車両挙動安定化制御又はトラクション制御の少なくとも一方である。制駆動力制御が実行された場合には、変更手段により設定速度が変更される。路面摩擦係数が低く滑りやすい路面などを車速制御しながら走行中に、制駆動力制御が実行された場合には、路面状況などに対して設定速度が高すぎると推測し、設定速度を変更する。これにより、車速が設定速度に到るまで運転者がアクセルを踏み続けることにより、頻繁に制駆動力制御が作動することが防止される。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
先行車追従制御方法及び先行車追従制御装置
【課題】個々の運転者のフィーリングに合う先行車追従制御ができ、ヒヤリハットを防止できる先行車追従制御方法及び先行車追従制御装置を提供する。
【解決手段】先行車と自車の車両情報を用いて自車が先行車に追従するための目標加速度を決定する先行車追従制御方法において、自車加速度が先行車加速度に所定の遅れ時間をもって追従できる加速度として演算した加速度要因加速度と、自車速度が先行車速度に所定の遅れ時間をもって追従できる加速度として演算した速度要因加速度と、車間距離を所定の目標車間距離に保てる加速度として演算した車間距離要因加速度とを重み付きで総和して目標加速度とする。
(もっと読む)
走行支援装置
【課題】本発明は、他車両の走行状態に基づいて自車両の適切な加速度を設定する走行支援装置を提供することを課題とする。
【解決手段】車車間通信で取得した他車両の走行状態に基づいて自車両の目標速度を設定する走行支援装置1であって、車車間通信で走行状態を取得できた他車両の台数の増加に応じて大きな加速度を設定する加速度設定手段51と、加速度設定手段51で設定した加速度に基づいて目標速度を設定する目標速度設定手段51を備えることを特徴とする。
(もっと読む)
1 - 20 / 113
[ Back to top ]