
Fターム[3D244AC57]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両外部状況に関するもの (874) | 道路状況 (753) | 傾斜 (62)
Fターム[3D244AC57]に分類される特許
1 - 20 / 62
走行制御装置
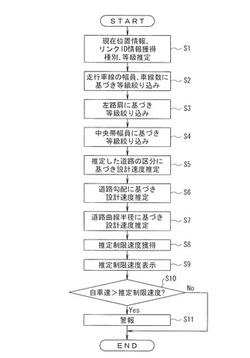
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
車両の走行制御装置

【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
他車認識システム
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
車両の運転支援装置
【課題】停止保持制御から追従走行制御への移行を違和感なく実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、停止中の前記先行車との車間距離Lが大値側に変化したとき車間距離Lの変化に伴って大値側に更新される第1の閾値Dth1と、先行車の車速Vfが高くなるほど大値側に変更される第2の閾値Dth2とを演算し、これらの何れか大きい値に基づいて前記判定閾値Dthを可変設定する。
(もっと読む)
ハイブリッド車両用駆動装置の制御装置
【課題】車重変化、走行抵抗、登降坂を加味して走行を制御することができドライバビリティのよいハイブリッド車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド車両用駆動装置の制御装置であって、被駆動部に伝達される駆動力と車速から導出される平坦路における走行抵抗とに基づいて算出した理論加速度と、単位時間の車速の変化から算出した実加速度との乖離量から登降坂レベルを算出する登降坂レベル算出部と、被駆動部に伝達される駆動力と、車速から導出される平坦路における走行抵抗と、登降坂レベルとに基づいて算出した期待加速度を積分して目標車速を算出する目標車速算出部と、目標車速と実際の車速との差異を電動機で補正するように電動機を制御するフィードバックコントローラと、を備える。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両の設定目標速度(Vcc設定目標速度)を維持するように設計されたコントロールユニットを含む車両クルーズコントロール制御方法及びシステムであって、前記コントロールユニットは、車両の総重量である第1パラメータ、現在の道路勾配である第2パラメータを登録し、該登録された第1パラメータ及び第2パラメータに基づいて、前記クルーズコントロールにおけるブレーキクルーズコントロールについての設定車両超過速度(Vbcc)を新しい値(Vbcc flex)に調節するようにプログラムされている。これにより前記クルーズコントロール及びブレーキ装置において、遅延による設定車両超過速度(Vbcc)を超える車両速度に起因する車両速度の増加が回避される。 (もっと読む)
補助動力装置付き二輪車
【課題】加速度センサを用いることなく適切な駆動力によるクルーズ走行を可能とする補助動力装置付き二輪車を提供する。
【解決手段】制御部46は、検知されたペダル踏力のピーク値に対応する目標車速MTが保持または漸減されるように駆動モータ24を駆動するクルーズ走行を実行すると共に、車速センサ37により検知される現在車速Vと目標車速MTとの対応関係に基づいて路面の勾配状態を判定し、該勾配状態に応じてクルーズ走行中に目標車速MTの更新を行う。目標車速の更新は、クルーズ走行中に、先に設定された目標車速MT1に対して現在車速Vが所定値以上減少すると、現在車速Vを新たな目標車速MT2,3とすることで実行される。一方、クルーズ走行中に、先に設定された目標車速MT3に対して現在車速Vが所定値以上増加すると、現在車速Vより所定割合だけ小さい車速を新たな目標車速MT4,5とする。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両クルーズコントロールを制御する方法であって、前記方法は、クルーズコントロールを作動状態にすると共に、車両設定目標速度(Vcc設定目標速度)を維持するように設定して、車両を運転するステップと、坂の上り坂を走行中に、車両の減速によって、車両設定目標速度より低い第1車速(Vmin)まで車速が低下し、しかも減速が0に減少した、又は車両設定目標速度まで車速を高めるために車両が加速し始めた第1車両位置(A)を登録するステップと、頂上から第1距離(y1、y2)を過ぎた地点での、頂上から下り坂の第2位置(C1、C2)における所望の車速(Vbcc超過速度)を登録するステップと、前記所望の車速に基づいて、第1距離(y1、y2)を走行中に最小限化又はゼロ燃料消費で、所望の車速に達することができるように、車両が頂上を通過しなければならない、頂上での車両最低速度(Vmin1、Vmin2、Vmin3)を計算するステップと、車両が、頂上を通過するとき車両最低速度(Vmin1、Vmin2、Vmin3)に達するように、第1車両位置(A)から頂上(B)までの第2距離(x)を走行中の車速を制御するステップとを含む。 (もっと読む)
エネルギ効率の高い自動車
【課題】アクセル踏み込み量に対応する動力を必要としない状況で燃料又はエネルギの無駄な消費を防止することができ、エネルギ効率を高めることができる自動車を提供する。
【解決手段】 エンジン1は、アクセル踏み込み量に対応して開度が制御される電子制御式のスロットルバルブ15を備えている。エンジン1は、さらに、アクセルセンサ31と、スロットルバルブ15を開閉するアクチュエータ16と、コントローラ30とを備えている。コントローラ30は、アクセル踏み込み量に対応するスロットル目標開度を演算し、スロットル目標開度に対応する連続的な制御信号をアクチュエータ16に出力する。さらに、コントローラ30は、自動車又はエンジン1がスロットル目標開度に対応するエンジン動力を必要としない走行環境又は運転状態では、スロットル制御信号をパルス制御信号に変換してアクチュエータ16に出力する。
(もっと読む)
オートクルーズ制御方法と装置
【課題】坂道においても制御遅れによる車速の乱れが起こらず、搭乗者には何ら違和感を感じさせないようにしたオートクルーズ制御方法と装置を提供することが課題である。
【解決手段】予め、撮像装置38により検出した道路の勾配と車速センサ26が検出した実車速とに対応したエンジンへの燃料噴射量を、車速−勾配対応燃料噴射量記憶装置24に記憶し、撮像装置38で道路の勾配と勾配開始位置とを検出したとき、目標車速と前方道路の勾配とに基づいて、車速−勾配対応燃料噴射量記憶装置24から対応するエンジンへの燃料噴射量を読み出すか記憶されたデータから算出し、撮像装置38により検出した勾配開始位置、または前記読み出すか算出した燃料噴射量に対応するエンジン回転数となるまでの時間遅れを加えて決定した勾配開始位置より手前の位置から、前記燃料噴射量でエンジンを駆動する勾配併用制御オートクルーズにより目標車速を維持するようにした。
(もっと読む)
車両運転支援装置
【課題】停車場所の状況により必要な車間距離を取って停車するように運転者に促したり制動を掛けたりするとともに、必要に応じて衝突の回避措置を強制的に行ない、他車両との衝突を確実に防止する。
【解決手段】車両(自車)100の前方もしくは後方の車間距離と、自車100の接地面の勾配や状況とに基づき、自車100の前方もしくは後方について必要な車間距離が決定され、この必要車間距離と現在の車間距離とに応じ、自車100の運転者に対する通知もしくは警報または自車100の制動もしくは操舵が行なわれる。
(もっと読む)
省燃費運転システム
【課題】制御開始から下り坂開始点を過ぎるまでの目標速度を線形で徐々に減速させ、燃料カットと噴射を繰り返すことなく、省燃費で且つ円滑な運転フィーリングが得られる省燃費運転システムの提供。
【解決手段】車両の位置を特定する車両位置特定装置(2)と、車両進行方向に存在する下り坂のデータを記憶する記憶装置(11)と、車両(1)の速度(車速V)を計測する車速計測装置(3)と、制御装置(10)とを有し、該制御装置(10)は、車両の速度(V)と、下り坂のデータとから車両(1)の目標速度(要求車速Vd)を決定(演算)する機能を有する。
(もっと読む)
車速制御装置
【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
1 - 20 / 62
[ Back to top ]