
Fターム[3D244AD00]の内容
定速走行制御 (7,912) | 制御対象 (1,393)
Fターム[3D244AD00]の下位に属するFターム
推進装置 (749)
クラッチ装置 (19)
変速装置 (161)
ブレーキ装置 (424)
リターダ、排気ブレーキ (16)
Fターム[3D244AD00]に分類される特許
1 - 20 / 24
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
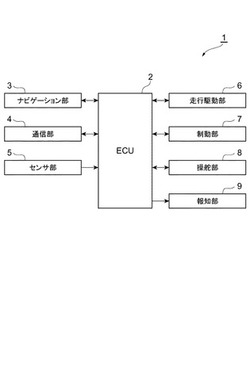
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
車両用運転支援装置および車両用運転支援方法

【課題】オートクルーズ制御がオンの状態で、ブレーキ操作を行わなくてもカーブ路を走行できるか否かの情報をユーザに提供する。
【解決手段】道路情報を取得し、取得した道路情報、および、定速走行制御時の一定速度に基づいて、定速走行制御中に一定速度でカーブ路を走行する際に必要となる必要旋回ヨーモーメントを算出するとともに、定速走行制御中に一定速度でカーブ路を走行する際に、車両が走行可能な限界ヨーモーメントを算出する。そして、車両がカーブ路に進入する前に、必要旋回ヨーモーメント65および限界ヨーモーメント64を、表示装置に表示させる。
(もっと読む)
走行制御システム
【課題】自車両や自車両周辺の車両の運転者に驚きや不快感を抱かせることなく、先行車両の追い越しを自動的に実行させる走行制御システムを提供すること。
【解決手段】自車両Vと先行車両Pとの間の車間距離を所定距離に維持するよう自車両Vの走行速度を制御する走行制御システム100は、自車両V及び先行車両Pの走行状態に基づいて自車両Vによる先行車両Pの追い越しの適否を判定する追い越し適否判定手段11と、先行車両Pの追い越しが適切であると判定した場合に、追い越しの準備動作を実行する追い越し準備動作実行手段12と、走行環境と自車両V及び先行車両Pの走行状態とに基づいて自車両Vによる先行車両Pの追い越しの可否を判定する追い越し可否判定手段13と、先行車両Pの追い越しが可能であると判定した場合に追い越しを実行する追い越し手段14とを備える。
(もっと読む)
車両用運転操作補助装置
【課題】車両制御モードの切換を運転者が容易に覚知することができる車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、車両制御モードが切り換わる際に切り換わりの重要度に応じて車両特性を一時的に変更し、運転者に車両制御モードの切り換わりを知らせる。自動制御モードから手動制御モードの高速領域に切り換えられる場合は、その他の切り換わりよりも車両特性の変更を強調して行う。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】制動制御の開始タイミングを早くすることによって障害物との接触の際の衝撃を小さくすることを可能とした車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】自車両と前方車両とが衝突する虞があると判定された状況下で衝突防止制御を行う際に、自車情報、前方車両情報及び周辺道路状況を考慮することにより、ステアリング操作によって前方車両との衝突が回避できるか否かを判定し(S21〜S25)、回避できると判定された場合にはAT5をシフトホールド制御するとともに、回避できないと判定された場合にはAT5をシフトダウン制御するように構成する。
(もっと読む)
車両の走行制御装置
【課題】 運転者に対して最適なタイミングで車間距離の制御や衝突回避の制御を実施する。
【解決手段】 先々行車を検知するミリ波レーダ2を備え、運転者からの前方の視認状態の情報を入手する前方カメラ12を備え、ミリ波レーダ2により先々行車の存在が確認された時の前方カメラ12による前方の見え方に応じてエンジン4の出力制御の作動状況、ブレーキ5の効かせ方の状況、シートベルト6やサポート部材9による乗員の拘束状況の作動タイミングを調整し、運転者の目線でみた状態に基づいて、車間距離の制御や衝突回避の制御といった走行制御を的確に行なう。
(もっと読む)
車両制御装置及び車両制御方法
【課題】車両に内外に関する情報に対し適切な制駆動制御を行うこと。
【解決手段】本発明は、車両内外に関する情報に基づき、車両内外に関する情報とは別の車両外に関する情報を取得する複数の取得手段20のうち1つの取得手段を選択する選択手段14と、取得手段20が取得した車両外に関する情報に基づき、車両を制動または駆動する制駆動手段30を制御する制駆動制御手段16と、を具備する車両制御装置及び車両制御方法である。
(もっと読む)
車間距離制御装置
【課題】より安定した車間距離制御を行うことができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を所定の組合せの車輪速に基づいて検出する車速検出手段2aと、先行車両と自車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して得られる車間時間を目標車間時間以上として、先行車両と自車両との車間距離を目標車間距離以上に保つように目標加速度GBASEを演算する目標加速度演算手段2cと、目標加速度GBASEに基づいて自車両を制御する制御手段2dと、車輪の空転滑走状態を判定する判定手段2eと、空転滑走状態が判定された場合に、所定の組合せを変更する変更手段2fを備えることを特徴とする。
(もっと読む)
車両およびその制御方法
【課題】定速走行指示がなされたときにより適正な制御を行なう。
【解決手段】モータからの動力を用いて走行する電気自動車において、定速走行が指示されたときに(ステップS110)、要求トルクTd*が負のトルクであると共に車両の状態がクリープトルク出力領域にあるときには(ステップS160,S200)、モータから出力するクリープトルクを徐減させて値0にすると共に(ステップS230〜S290)駆動輪に要求トルクTd*に基づく制動力を作用させる(ステップS300,S310)。こうした制御によりモータから駆動方向のトルク(クリープトルク)を出力する一方で駆動輪に制動力を作用させるものに比して、より適正な制御を行なうことができ、エネルギ効率の向上を図ることができる。
(もっと読む)
省燃費運転推奨装置
【課題】ユーザの違和感が生じることを防止できる省燃費運転推奨装置を提供すること。
【解決手段】本発明によるエコインジケータ1は、アクセル開度を検出する検出手段3bと、検出手段3bにより検出されたアクセル開度Ac又はアクセル開度Acから換算されたスロットル開度Taが省燃費領域Sから逸脱している場合にユーザに前記逸脱を通知する通知手段3aと、車両の速度を設定速度Vsに維持するようにスロットル開度Tcを制御する制御手段6を備えるとともに、制御手段6がスロットル開度Tcを制御している場合において、検出手段3bが正値のアクセル開度Acを検出したときに、アクセル開度Acから換算されたスロットル開度Taが、制御手段6の制御するスロットル開度Tcよりも小さい場合には、通知手段3aが前記通知を行わないことを特徴とする。
(もっと読む)
車両用制御装置
【課題】自車両に接近する後方車両をより確実に回避すること。
【解決手段】車両用制御装置10は、後方車両の自車両への接近を検出する接近検出手段1aと、自車両の車速が設定された制限速度以下となるように、車速の制限制御を行う車速制御手段1bと、を備えている。また、接近検出手段1aにより、後方車両の接近が検出されたとき、車速制御手段1bは制限制御を解除するのが好ましい。さらに、車線変更検出手段21aにより、自車両の車線変更が検出されているときにおいて、車速制御手段1bは制限制御を解除するのが好ましい。
(もっと読む)
車線保持装置、車線保持システム
【課題】コンピュータに異常が生じるような走行状況でも、走行車線からの逸脱傾向を検知して車線を維持する車線保持装置及び車線保持システムを提供すること。
【解決手段】舵角を制御する舵角制御手段22、14と、走行路の傾斜を検出する傾斜検出手段13と、車線近傍又は車線に設計速度に応じて設けられた凹凸を検出する凹凸検出手段11FR〜11RRと、凹凸検出手段により検出した信号の周期性から当該走行路の設計速度を検出する設計速度検出手段21と、を有し、舵角制御手段は傾斜及び設計速度検出手段により検出された設計速度に基づき舵角を決定する、ことを特徴とする車線保持装置を提供する。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、障害物(静止物体)が検知された時点で算出された、該障害物の進行路中心線からのずれ量に基づいて、該障害物の自車両に対する相対移動位置を推定する場合に、その相対移動位置を正確に推定できるようにする。
【解決手段】レーダ装置1により障害物が検知された時点で算出された上記ずれ量を、該障害物の自車両に対する相対移動位置を推定する際に、該障害物が検知されてから所定時間経過した時点で検出された旋回半径に基づいて補正する。
(もっと読む)
車両制御装置
【課題】車間距離制御や定速走行制御を行う車両制御装置において、隣接車線を走行する車両が自車両の前方に割り込んでくる可能性を適切に判断し、車両の制御を行なうこと。
【解決手段】車両に搭載され、車間距離制御及び定速走行制御を行う車両制御装置1であって、自車両が走行する車線に隣接すると共に走行方向が略同一の車線である、隣接車線における所定範囲内を走行する車両を検出する、車両検出手段を備え、車両検出手段により複数の車両が検出され、且つ検出された車両間の相対関係が所定条件を満たす場合には、自車両の速度を抑制する速度抑制制御を行なうことを特徴とする。
(もっと読む)
自動運転制御装置
【課題】自動運転からマニュアル操作による運転に切換えられた後、ドライバの運転操作が適正であるかどうかチェックされた上で自動運転が完全に解除される自動運転制御装置を提供する。
【解決手段】本発明の自動運転制御装置には、ドライバが自動運転解除要求を行った後、実運転をドライバが引き継ぐまでの間に、ドライバが適正な運転操作を行い得るかどうかを判定する自動運転解除可否判定手段が設けられている。この自動運転制御装置は、S163〜S168に示されるように、ドライバによる運転操作と自動運転制御装置が最適と判断する運転操作とを比較して、この比較結果が一定時間、一定値以内であれば、ドライバは適正な運転をすることができると判定する。
(もっと読む)
自動車の追従走行システム
【課題】
自車両と前方車両との目標車間距離を維持しながら自車両を前方車両に追従走行させる自動車の追従走行システムにおいて、自車両の走行環境に適合した目標車間距離を迅速・確実に設定することを課題とする。
【解決手段】
追従走行システムは、自車両と前方車両との目標車間距離の設定に用いる補正係数を道路毎及び月日時刻毎の過去の交通情報に基いて生成する生成部22aと、前記補正係数を道路毎及び月日時刻毎に記録する記録部22bと、自車両が走行中の道路を検出するナビゲーションシステム20と、現在の月日時刻を検出するコントロールユニット10とを有し、前記目標車間距離は、前記記録部22bで記録されている補正係数のうちナビゲーションシステム20で検出された道路及びコントロールユニット10で検出された月日時刻に該当する補正係数を用いて設定される。
(もっと読む)
車両用運転支援装置
【課題】先行車を追従する車間距離制御モードにおいて、自車速を制御する際のエンジン出力変動を抑制し、安定した車速制御性を得る。
【解決手段】
エンジン1に供給する吸入空気量を可変するスロットル弁4と、吸入空気量を過給するターボ過給機5と、スロットル弁4とターボ過給機5とによりエンジン出力Tを制御して、自車速Sjを先行車との車間距離に基づいて設定した目標車速Soに収束させるエンジンECU21とを備え、エンジンECU21は、自車を先行車に追従走行させる車間距離制御モード時にターボ過給機5による過給動作を制限し、スロットル弁4の開度制御により自車速Sjを目標車速Soに収束させる。
(もっと読む)
車両走行制御装置
【課題】 低速追従制御と高速追従制御の起動時の運転者の負担を軽減する車両走行制御装置を提供することを課題とする。
【解決手段】 先行車両に追従するために車両の走行状態を制御する車両走行制御装置であって、低速用追従制御手段と、高速用追従制御手段とを備え、低速用追従制御手段の制御開始許可車速領域は、高速用追従制御手段の制御車速領域と重なる車速領域を含まず、高速用追従制御手段の制御開始許可車速領域は、低速用追従制御手段の制御車速領域と重なる車速領域を含むことを特徴とする。
(もっと読む)
車両用安全制御装置
【課題】 車両の衝突事故等を未然に回避できる車両用安全制御装置を提供する。
【解決手段】 周辺環境検出部2によって自車両の周辺環境を検出し、他車両の自車両への衝突危険性を判定する。衝突危険性があると判定された場合には、他車両の回避を行うための回避位置を決めて、自車両がその回避位置に向かって移動できるように速度ベクトルを演算する。このときの回避位置は、道路の道幅や前方に障害物が有るか否か等に応じてパターン化しておく。そして、回避位置までの距離、回避方向、回避目標速度を求め、それを実現するための操舵量や加減速度を求め、操舵制御、ブレーキ制御もしくは駆動力制御を行うことで、自車両を回避位置まで移動させる。これにより、車両の衝突事故等を未然に回避することが可能となるか、もしくは、車両の衝突事故等を未然に防げないにしても衝突から回避できる可能性を向上させることが可能となる。
(もっと読む)
1 - 20 / 24
[ Back to top ]