
Fターム[3D244AE03]の内容
Fターム[3D244AE03]の下位に属するFターム
比較 (317)
位相補償
遅延 (12)
タイマ (47)
時分割 (2)
不感帯 (12)
補正 (199)
記憶、保持 (37)
学習 (15)
フィルタ (16)
マップ、モードの選択 (91)
帰還制御 (301)
フィードフォワード制御 (19)
デューティ制御 (1)
ファジー制御
Fターム[3D244AE03]に分類される特許
1 - 20 / 22
運転支援装置
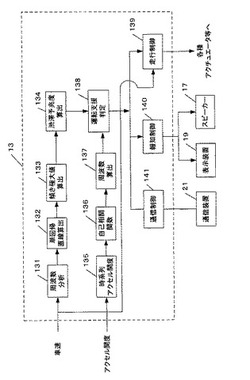
【課題】燃費を向上させるための車両の運転支援装置を提供する。
【解決手段】自車両のアクセル開度を検出する手段と、アクセル開度の時系列データに基づいて、該アクセル開度の自己相関関数を算出する手段136と、自己相関関数の値に基づき、自車両のアクセル操作の周波数を算出する手段137と、自車両の加速度を検出する手段と、加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段131と、パワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133と、を備える、燃費を向上させるよう車両の運転を支援するための装置である。この装置は、アクセル操作の周波数が所定値よりも低く、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
車両用走行制御装置

【課題】自動変速モードを選択したオートクルーズ制御中に手動変速モードへの切換が指令されたときに、それに応じて変速制御モードの切換とオートクルーズ制御の作動状態とを適切に連係でき、もって運転者の意志を反映した適切な車両の走行を実現できる車両用走行制御装置を提供する。
【解決手段】オートクルーズ制御中に手動変速レンジ(A/Mレンジ、+−レンジ)への切換操作がなされたとき(S24がYes)、運転者の加減速要求であると見なし、オートクルーズを解除して手動変速モードを選択することで任意の手動変速を可能とし(S26,28)、一方、オートクルーズ制御中にNレンジへの切換操作がなされたときには誤操作と見なし(S24がNo)、オートクルーズを解除して自動変速モードを選択し不適切な変速を防止する(S14,16)。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
制御目標演算装置
【課題】 制御対象の制御における信頼性の向上を図ることができる制御目標演算装置を提供することができる。
【解決手段】本発明は、入力値に応じた制御量を制御目標として制御対象に出力する制御目標演算装置1であって、入力値の時系列データである入力時系列データを生成する入力ECU3と、所定の演算処理により、入力時系列データの入力値にそれぞれ対応する中間演算値を算出することで、中間演算値の時系列データである中間演算値時系列データを生成する演算ECU4と、中間演算値時系列データの中から、第1の選択条件に従って選択値を選択すると共に、この選択値から算出した制御量を制御目標として出力する制御ECU5と、を備え、演算ECU4は、複数のECU4a1〜4amからから構成され、複数のECU4a1〜4amの間では、時系列データとしてデータの入出力が行われている。
(もっと読む)
車間距離制御装置
【課題】運転者の意図に従って目標車間距離の変更を確実に行うことができる車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の変速操作を検出する変速操作検出手段と、変速操作検出手段により検出した変速操作に基づいて目標車間距離を変更する目標車間距離変更手段とを備えることを特徴とし、特に、目標車間距離変更手段では、車間距離制御中に変速操作検出手段により高速シフトから低速シフトへの変更を検出した後に低速シフトから高速シフトへの変更を検出したときの車間距離に基づいて目標車間距離を変更したり、あるいは、車間距離制御中に変速操作検出手段によりマニュアルモードへの操作を検出した場合にマニュアルモードにおける各操作に応じて目標車間距離を拡大又は縮小する。
(もっと読む)
車両走行制御装置
【課題】 停止保持状態にある自車両が発進する際に、ドライバに与えるショック感を低減することができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、カメラ2から送信される画像信号に基づいて先行車両におけるブレーキランプの点灯状態を判断する。自車両が停止しているときに、先行車両のブレーキランプが消灯した場合に、自車両の駆動レンジをニュートラルレンジからドライブレンジに移行させる。
(もっと読む)
車両走行制御装置
【課題】自動走行制御を不可能にしてしまうような異常の検知
【解決手段】車両の車速の調整を行うエンジン100を目標制御量に基づいて制御する第1ECU(エンジンECU9)と、車速が目標車速となるように目標制御量を算出して第1ECUへと出力する第2ECU(自動走行制御ECU8)と、を備え、その第1ECUは、エンジン100の回転数又は発生する制御量が所定値を超えた際に目標制御量に基づくエンジン100の制御を禁止させるべき異常状態にあるとの判定を行う異常判定部(システム限界判定部91)を設けること。
(もっと読む)
自動車のための速度制御システムの駆動状態を選択する方法
【課題】速度制御システムの駆動状態の自動的な選択,特に適応的な速度制御システムのアクティブな状態と非アクティブな状態の間の選択を,目隠し認識の結果を適切に考慮して,駆動状況の大きな帯域幅内で適応的な速度制御システムの高い利用性と運転者にとっての妥当なシステム反応が達成されるように改良することである。
【解決手段】間隔センサと自動的な目隠し認識とを有する,自動車のための速度制御システムにおける駆動状態を選択する方法は,上記間隔センサが目隠しされている場合に速度制御を自動的にオフすることに関して,少なくとも1つの他の条件(S7)も調べられ,この他の条件も満たされている場合にのみ上記速度制御の自動的オフが行われることを特徴としている。
(もっと読む)
車両検知装置
【課題】 自車の周囲を走行する車両の位置をユーザーに通知することが可能な車両検知装置を提供すること。
【解決手段】周辺検知装置5は、レーダ装置2から取得した前方車両情報と、車々間通信装置31から取得した前方車両情報との示す位置を、自車を基準としたマッピング領域にマッピングする。マッピングされた各車両位置のうち、所定距離よりも近接し、その進行方向の一致度合いが大きい複数の車両位置に関しては、当該車両位置を示す情報の信頼度を算出し、これに応じて車両位置を特定する。ナビゲーションECU44は、前述の特定結果から作成された車両位置情報に基づいて、自車の周囲を走行している車両をディスプレイ43に表示させ、ユーザーに通知する。
(もっと読む)
車両の運転支援方法及び車両の運転支援装置
【課題】異なる条件の後方車両の追突に対して、その異なる条件に応じて最適な運転支援をすることができる車両の運転支援方法及び車両の運転支援装置を提供する。
【解決手段】CPU2は、加速制御しても前方車両に追突する状態にあって後方車両との追突が回避できないと判断したとき、後方車両の車速及び自車両の車速の他に、自車両の車重量と後方車両の車重量を考慮にして最小の衝撃力で後方車両に追突されかつ前方車両に追突しない場合の加速度を演算する。そして、CPU2は、燃料噴射制御装置15を介して、演算した加速度で自車両を加速制御するようにした。従って、自車両は、後方車両の車種に左右されることなく、最小の衝撃力で追突を吸収することができる。
(もっと読む)
走行制御システム
【課題】複数台の車両によって隊列を形成して車両を走行させる際に、隊列全体の車両の安全をより高めることができる走行制御システムを提供する。
【解決手段】車両走行制御装置1のECU10は、隊列を形成する車両の内、隊列を形成する車両及び隊列を形成しない車両の少なくともいずれかによって前方及び後方を囲まれている車両から順に走行計画を生成し、隊列の車群重心Gに近い前方車両及び後方車両との追突の可能性がある車両から優先的に走行計画を立てた後に、前方及び後方を他車両によって囲まれておらず隊列の車群重心Gから遠い比較的に安全な車両の走行計画を立てるため、隊列全体の車両の安全をより高めることができる。
(もっと読む)
周辺監視システム
【課題】より速やかに他車の追尾を開始することのできる「周辺監視システム」を提供する。
【解決手段】レーダ装置1の計測データに基づいて、未追尾の他車の検出と、検出した他車の存在の複数回の確認の処理とを経て、存在を確認した他車の追尾を開始する物標追尾部4を設ける。そして、物標追尾部4において、レーダ装置1の計測データから未追尾の他車の発生が検出されなかった場合でも、他車認識部3がカメラ2で撮影した画像に対する画像認識によって、物標追尾部4において未追尾の他車が識別された場合には、レーダ装置1の計測データに基づいて、当該他車の存在を複数回確認する処理を開始する。
(もっと読む)
車両の制御装置及び車両制御用情報の車両間相互利用システム
【課題】メモリに記憶している環境情報がクリアされてしまった場合でも、環境情報を用いた車両の制御を高い制御精度で継続して行えるようにする。
【解決手段】記憶手段12Aの記憶内容がクリアされた場合、車車間通信手段16Aによって自車両2Aを基準とする所定エリア内の他車両2Bに対し、他車両2Bが有する環境情報の送信を要求する。そして、他車両2Bから送信された環境情報を取得し、自車両2Aに関する環境情報として記憶手段12Aに記録する。
(もっと読む)
車両の走行制御装置
【課題】車両の実走行速度を目標速度に一致させるように実走行速度調節手段を制御する制御手段を備えた車両の走行制御装置において、目標速度変更スイッチにより目標速度の変更を行う場合に、目標速度がいくらに変更されたかを車両の乗員が把握し易くする。
【解決手段】乗員によるセットスイッチの操作後における目標速度変更スイッチの1回目及び3回目以降の操作時には、目標速度を、目標速度変更スイッチの1回の操作毎に一定の速度だけアップ又はダウンさせる(ステップS4、S8)一方、上記セットスイッチの操作後における目標速度変更スイッチの2回目の操作時には、目標速度を一定の速度以下の速度だけアップ又はダウンさせる(ステップS6)。
(もっと読む)
対象物検出装置および方法
【課題】対象物検出装置の投光するレーザ光の投光方向のずれを補正できるようにする。
【解決手段】左から右に向かって走行する自車1に、所定の高さhで取り付けられた対象物検出装置2のレーザレーダ3から投光されたレーザ光は、頭上標識41により反射され、レーザレーダ3に受光され、対象物検出装置2は、頭上標識41までの距離を算出し続ける。頭上標識41がレーザ光の投光範囲外に出る瞬間、すなわちレーザ光上端31が、頭上標識41の下端bを通過する瞬間、対象物検出装置2は、頭上標識41までの距離L1を特定し、頭上標識41の設置高H、および対象物検出装置2の設置高hを基に、レーザ光上端31の平行線51に対する角度θを算出する。対象物検出装置2は、算出したθから角度Θ/2を引き、平行線51に対する光軸33の角度を求めることにより、光軸のずれを求め、これを補正する。
(もっと読む)
車両交通量の安定化制御のための方法及び装置
【課題】 高速道路ないし鉄道軌道等の自動車ないし車両交通において格別の障害物の存在しない場合でも発生しうる渋滞現象を改善するための方策であって、運転者が有効かつ安全に制御に組み入れられる方策を提案する。
【解決手段】 マンマシン系として作業を分担させ、車間距離ならびに速度制御機能を運転者に行わせる一方で、車間距離列安定化のための制御量を自動計算し、各車で加算配合して加える方法及び装置を提供する。車間距離の安定化は、先行車からの加減速情報を適切に積算し後方にリレー伝達させる分散制御法で実現される。これにより、車間距離計測そのものを要求せずに車間距離列の安定化が可能になり、装備化も容易で、運転者が局所制御を依然担えるために安全性が確保できる方式が実現できる。本制御は車間制御であり、またその結果として得られる渋滞解消を含む交通量の安定化制御法である。
(もっと読む)
車両用走行制御装置
【課題】 追従走行中の先行車が検出されなくなったときに、加速動作が不適切な場所で設定車速への加速動作が実行されて運転者に違和感を与えるのを防止する。
【解決手段】 自車両が走行する車線のレーンマーカーを検出して車線情報を検出し、追従走行中の先行車が検出されなくなったときに、自車線の車線情報に基づいて設定車速への加速動作の許可または抑制を判定し、その判定結果にしたがって追従走行中の先行車が検出されなくなった後の車速を制御する。
(もっと読む)
乗員保護システム、及び乗員保護装置
【課題】乗員、特に子供の安全性を向上させるための乗員保護システムを提供すること
。
【解決手段】車両の乗員の安全性を図るための乗員保護システムにおいて、乗員が大人
であるか子供であるかを判別する大人子供判別手段と、乗員の位置を検出する乗員位置検
出手段と、大人子供判別手段による判別結果、及び乗員位置検出手段による検出結果に基
づいて得られる、子供の乗車状況に応じて、車載機器の制御を行う子供保護制御手段とを
装備する。
(もっと読む)
自動式速度感知装置
【課題】
異なる車種であってもパルス信号を発生してに、車速を自動的に感知しながら速度調整を行うことができる自動式速度感知装置を提供する。
【解決手段】
少なくとも、演算、比較機能を有すると共に、その入力端に車から出力されるパルス信号を受信するマイクロプロセッサと、該マイクロプロセッサにおける他の入力端に設けられ、設定指令を入力するための入力ユニットと、前記マイクロプロセッサに接続されると共に、該マイクロプロセッサから出力されるパルス信号を設定値として記憶するメモリとを備える自動式速度感知装置であって、
該自動式速度感知装置は、実際の車速から臨界速度の設定値を設定する設定形式と、常に実際の車速及び臨界速度の設定値と比較することにより、制御信号を発生する作動形式とを有することを特徴とする。
(もっと読む)
1 - 20 / 22
[ Back to top ]