
Fターム[3D244AE19]の内容
Fターム[3D244AE19]に分類される特許
1 - 20 / 91
走行制御装置
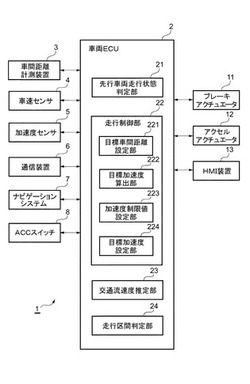
【課題】不要な加速を抑制するとともに、先行車両に対して安定して追従することができる走行制御装置を提供する。
【解決手段】本発明に係る走行制御装置1は、自車両が走行している車線上で、自車両の最も近くに存在する先行車両の走行状態を判定する先行車両走行状態判定部21と、先行車両走行状態判定部21によって判定された先行車両の走行状態に基づいて、加速度の制限値を設定して自車両の走行制御を行う走行制御部22と、を備える。
(もっと読む)
車速制御装置

【課題】追従制御中にブレーキ操作が行われた場合に適正に車速を制御する。
【解決手段】車速制御ECUは、運転者によるブレーキ操作を検出する操作検出手段と、前記追従制御手段によって車速が制御されている状態で、前記操作検出手段によってブレーキ操作が検出された場合に、前記距離検出手段によって車間距離が検出されているか否かを判定する第2距離判定手段と、前記第2距離判定手段によって車間距離が検出されていると判定された場合に、前記追従制御手段の最大加速度を前記予め設定された最大加速度未満の値に変更する第4指示手段と、を備える。
(もっと読む)
車両駆動ユニットの制御装置
【課題】クルーズモード実行中に異常トルクが検出されたとき、自動的且つ安全に適切なクルーズトルク調整。
【解決手段】異常トルクを検出する第1トルク判定部17を有する第1のモジュール19と、第1のモジュール19とは独立且つ併行して異常トルクを検出する第2トルク判定部21を有する第2のモジュールとを含んだ制御手段5を備え、第1のモジュール19には、目標車速設定部25と実車速検出部27が備えられており、第2のモジュールには目標車速設定部26と実車速検出部28に加えて、目標車速V1と実車速V2との差分V0を計測し、差分V0に対応したトルク制限率Sと当該トルク制限率Sに基づいた第2算出トルクT22とを算出するトルク制限率算出部29が備えられており、制御装置5には差分V0が第1データ範囲を越えたとき、トルク制限率Sに基づいて最終的な出力トルクを設定するトルク設定部37が備えられている。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両の走行制御装置
【課題】車両の前方の物体を検知し、車両の走行軌跡を推定し、該推定された走行軌跡に基づいて、該車両の前方に所定の検知エリアを設定する。
【解決手段】物体の検知結果および設定された検知エリアに基づいて先行車を抽出し、目標車間距離に基づいて、該先行車に追従走行するよう車両を制御する。ここで、検知エリア内で検知された先行車に対する距離が目標車間距離以下であるとき、追従走行の開始に応じて該検知エリアを拡大すると共に、該先行車に対する距離が該目標車間距離より大きいとき、該検知エリアの拡大を、該追従走行を開始してから所定時間が経過するまで禁止する。こうして、隣車線上の他の車両を誤って追従走行しようとする場合には、該他の車両に安定追従する前に、該他の車両を検知エリアから外すことができる。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車群走行制御装置
【課題】車群内の一部の車両が車群を離脱する場合にも、車群を維持することができる車群走行制御装置を提供する。
【解決手段】
車群内順序決定部106により、各車両は、車群内の自車両の順序である車群内順序を決定し、走行計画とともに、車両IDおよび車群内順序を送信機から同報送信する。追従車両は、複数の先頭車両走行計画を取得した場合、先頭車両走行計画とともに送信されてくる車両IDと車群内順序に基づいて、それら複数の先頭車両走行計画を送信した各先頭車両の車群内順序を決定し、且つ、その決定した各先頭車両の車群内順序と自車両の車群内順序とに基づいて、自車両の走行計画を決定するために用いる先頭車両走行計画を選択する(先頭車両選択部108)。これにより、自車両が追従すべき先頭車両走行計画を誤らずに用いて追従車両走行計画を決定することができるので、車群内の一部の車両が車群を離脱する場合にも車群が維持される。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
無段変速機の変速制御装置
【課題】クルーズ制御中の過渡時における無段変速機の変速ハンチングを抑制する。
【解決手段】クルコン要求馬力演算部33はクルーズ目標車速Soと実車速Sとの速度差ΔSからクルコン要求馬力HPsを求め、クルコン要求トルク演算部34はクルコン要求馬力HPsとエンジン回転数Neとに基づいてクルコン要求トルクTcsを求める。クルコン用アクセル開度演算部37はクルコン要求トルクTcsとエンジン回転数Neとに基づきクルコン用アクセル開度θhaの特性曲線が等馬力曲線に沿って設定されているエンジントルクマップを参照して、クルコン用アクセル開度θhaを設定する。目標プライマリ回転数演算部25はクルコン用アクセル開度θhaと実車速Sとに基づき変速線マップを参照して目標プライマリ回転数Npoを設定する。変速制御部26は目標プライマリ回転数Npoと実車速Sとに基づき目標変速比を求めて変速制御を行う。
(もっと読む)
運転解析システムおよび運転記録装置
【課題】運転者に対する安全運転教育のための運転記録を提供する運転記録装置および当該運転記録に基づいて運転状態の解析を行う運転解析システムを提供する。
【解決手段】ステレオカメラ1で撮影された画像データを記録する画像記録部2と、画像データから3次元画像情報を算出する3次元画像情報算出部3と、3次元画像情報に基づいて、画像中の動体対応画像部分を特定する動体特定部4と、3次元画像情報に基づいて自車両の速度を検出する速度算出部5と、動体との車間距離を検出する車間距離検出部6と、車間距離および速度算出部5で検出された自車両の速度等の運転情報を記録する記録部7を備えている。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
エネルギ効率の高い自動車
【課題】アクセル踏み込み量に対応する動力を必要としない状況で燃料又はエネルギの無駄な消費を防止することができ、エネルギ効率を高めることができる自動車を提供する。
【解決手段】 エンジン1は、アクセル踏み込み量に対応して開度が制御される電子制御式のスロットルバルブ15を備えている。エンジン1は、さらに、アクセルセンサ31と、スロットルバルブ15を開閉するアクチュエータ16と、コントローラ30とを備えている。コントローラ30は、アクセル踏み込み量に対応するスロットル目標開度を演算し、スロットル目標開度に対応する連続的な制御信号をアクチュエータ16に出力する。さらに、コントローラ30は、自動車又はエンジン1がスロットル目標開度に対応するエンジン動力を必要としない走行環境又は運転状態では、スロットル制御信号をパルス制御信号に変換してアクチュエータ16に出力する。
(もっと読む)
オートクルーズ制御方法と装置
【課題】坂道においても制御遅れによる車速の乱れが起こらず、搭乗者には何ら違和感を感じさせないようにしたオートクルーズ制御方法と装置を提供することが課題である。
【解決手段】予め、撮像装置38により検出した道路の勾配と車速センサ26が検出した実車速とに対応したエンジンへの燃料噴射量を、車速−勾配対応燃料噴射量記憶装置24に記憶し、撮像装置38で道路の勾配と勾配開始位置とを検出したとき、目標車速と前方道路の勾配とに基づいて、車速−勾配対応燃料噴射量記憶装置24から対応するエンジンへの燃料噴射量を読み出すか記憶されたデータから算出し、撮像装置38により検出した勾配開始位置、または前記読み出すか算出した燃料噴射量に対応するエンジン回転数となるまでの時間遅れを加えて決定した勾配開始位置より手前の位置から、前記燃料噴射量でエンジンを駆動する勾配併用制御オートクルーズにより目標車速を維持するようにした。
(もっと読む)
走行支援装置
【課題】本発明は、移動体の適切な上限速度を設定する走行支援装置を提供することを課題とする。
【解決手段】移動体の移動速度の上限速度に基づいて走行支援を行う走行支援装置1であって、移動体の周辺に存在する物体を検出する周辺物体検出手段10,31と、周辺物体検出手段で検出した周辺物体が移動体の進路上の領域に存在する場合と当該進路上の領域の側方領域に存在する場合とで異なる上限速度を設定する上限速度設定手段32とを備えることを特徴とする。
(もっと読む)
車間距離制御装置
【課題】 車速変動を低減して燃費悪化を抑制することを可能とした車間距離制御装置を提供する。
【解決手段】 レーダ11、12やカメラ21、22、車々間通信機41等で取得した隣接車線を含む他車両の状況、車線の状態といった車両の走行環境から車間制御ECU31は、先行車両と自車両との間に他車両が割り込んでくる割り込み可能性を判定し、当該割り込み可能性が低いと判定した場合には、そうでない場合に比較して先行車両との車間距離が長くなるようエンジンECU51、ブレーキECU61により、車両の加減速状態を制御する。
(もっと読む)
車間距離制御装置
【課題】運転者による加減速操作に応じて目標車間距離を変更した場合にドライバビリティの悪化を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、自車と先行車との車間距離を取得する車間距離取得手段と、運転者の加速操作又は減速操作に応じて車間距離に基づいて目標車間距離を変更する目標車間距離変更手段と、自車と先行車との相対速度を取得する相対速度取得手段とを備え、目標車間距離変更手段は、加速操作終了が検出された後又は減速操作終了が検出された後に、自車と先行車との相対速度が零になったときの車間距離に基づいて目標車間距離を変更することを特徴とする。
(もっと読む)
1 - 20 / 91
[ Back to top ]