
Fターム[3D246BA02]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ型式 (2,987) | 液圧式ブレーキ (2,083)
Fターム[3D246BA02]に分類される特許
21 - 40 / 2,083
車両用制動装置
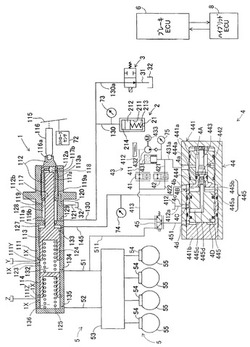
【課題】機械式レギュレータの簡素化及び小型化が可能な車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、高圧源のブレーキ液圧に基づいて、パイロット室に供給されるパイロット圧に応じた出力圧力を出力ポートから送出する機械式レギュレータ44と、パイロット室に接続された切替部45と、切替部を介してパイロット室に接続され、第1パイロット圧をパイロット室に供給する第1パイロット圧発生装置1と、切替部を介してパイロット室に接続され、第2パイロット圧をパイロット室に供給する第2パイロット圧発生装置41〜43と、機械式レギュレータの出力ポートから供給される出力圧力に基づいたブレーキ力を発生させるホイルシリンダ54と、を備え、切替部は、第1パイロット圧及び第2パイロット圧の何れか一方をパイロット室に供給することを特徴とする。
(もっと読む)
車両用制動装置

【課題】マスタ系統の失陥を検出でき、検出後のブレーキ力低下を抑制することができる車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、ブレーキ操作部材の操作に伴って、ブレーキ操作部材の操作力のみによってマスタピストンを駆動させ、ブレーキ操作部材の操作量が所定量である場合又はブレーキ操作部材の操作力が所定力である場合における、マスタシリンダ圧に相関するマスタシリンダ圧相関値が所定値未満である場合に、マスタ系統の失陥を検出する失陥検出手段(6)と、失陥検出手段によりマスタ系統が失陥していることが検出されたブレーキ操作部材の操作において、ブレーキ操作部材の操作量が所定量よりも大きい場合又はブレーキ操作部材の操作力が所定力よりも大きい場合に、サーボ圧発生部で発生させたサーボ室内のサーボ圧に対応する力によってマスタピストンを駆動する駆動制御手段(4、6)と、を備える。
(もっと読む)
ブレーキ液圧制御装置
【課題】リザーバの組立て性を向上すると共に、ピストンの作動性を良好にするブレーキ液圧制御装置を提供することを目的とした。
【解決手段】リザーバ70は、前記油圧ユニットを構成する油圧ブロック12に形成されたシリンダ71と、前記シリンダ71の内部を軸線方向に往復移動可能であり液圧室と気体室をそれぞれ区画するピストン72aと、前記気体室に位置し前記ピストン72aに対し前記気体室の側から前記液圧室の側に向かう力を与える板状バネ部材73と、前記シリンダ71の開口部を塞ぐカバー部材74aとを具備してなり、前記板状バネ部材73と前記カバー部材74aは隣接部の一部を一体化した。
(もっと読む)
電磁弁
【解決手段】弁構造群20と、該弁構造群20に接合された磁石構造群10とを有する電磁弁1であって、前記弁構造群が、第1の弁スリーブ22と、該第1の弁スリーブ22内で長手方向可動に案内された、シール構造部26.1を備えた磁石可動子24と、弁座32を備えた弁体30とを有し、前記磁石構造群10が、ハウジング周壁12とカバー18とコイル巻線16とを有し、該コイル巻線は給電されると、磁石可動子24をリターンスプリング27の力に抗して移動させるための磁力を発生するようになっており、前記第1の弁スリーブ22は開放端部22.2で以て、弁体30の開放端部34内に侵入し、かつ前記弁体30内に固定され、前記弁体30の端面36が、前記弁構造群20を固定するための手段として構成されている。
【効果】流体ブロック若しくはポンプハウジングの上縁部を越える構造高さが減少され、かつ弁構造および組立が簡略化された。
(もっと読む)
車両用ブレーキ装置
【課題】 ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高める。
【解決手段】 ブレーキペダル12のストロークを検出するストロークセンサScが、ペダル回動軸12bとは軸心を異にして平行に配置されるセンサ回動軸74と、ペダルアーム12cの回動によりセンサ回動軸74まわりに回動するセンサアーム75とを備えており、ストロークセンサScの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにしたので、ストロークセンサScに高い検出精度が要求とされるときに、ストロークセンサScの出力特性の線形性を高めて誤差の発生を最小限に抑えることができるだけでなく、ストロークセンサScの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
車両減速度制御装置
【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両用制動装置
【課題】レギュレータピストンの増圧位置固着故障を検出でき、且つ検出後の車両の走行を可能とする車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、高圧ポートと、低圧ポートと、サーボ室に連通する出力ポートと、パイロット液圧が供給されるパイロット室と、パイロット液圧に応じて、出力ポートを高圧ポートに連通させる増圧位置と、出力ポートを低圧ポートに連通させる減圧位置との間で作動するレギュレータピストンと、を有するレギュレータと、高圧力源とパイロット室との間の増圧弁と、低圧力源とパイロット室との間の減圧弁と、増圧弁と減圧弁とを制御する制御部と、を備え、制御部は、増圧位置固着故障を検出する故障検出手段を有し、故障検出手段によって増圧位置固着故障が検出された場合、増圧弁と減圧弁とを開状態に制御してサーボ室を減圧する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
ブレーキ装置
【課題】回生協調を行なうブレーキ装置において、ブレーキペダルを急操作したとき、ブレーキペダルに適度な反力を与えると共に液圧制御装置に円滑にブレーキ液を供給する。
【解決手段】ブレーキペダル19によってマスタシリンダ110でブレーキ液圧を発生させて、各車輪のホイールシリンダBa〜Bdに供給する。リザーバポート166、167を開いた状態で回生ブレーキ装置8により回生制動を行ない、液圧制御装置5によってホイールシリンダBa〜Bdに供給するブレーキ液圧を調整して回生協調制御を実行する。ブレーキペダル19の急操作に対して、リザーバポート166、167のオリフィスにより適度な反力を付与し、また、リザーバポート166、167をバイパスするバイパス通路180、181及び逆止弁182、183により、液圧制御装置5にブレーキ液を円滑に供給して、プライマリ及びセカンダリ室162、163の過度の減圧を防止する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ踏み上げ操作の際、ペダルストロークに対するホイールシリンダ液圧特性が段付き特性になるのを抑えることで、制動減速度のフィーリングを向上すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、ブレーキスイッチ93と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、両M/Cカットソレノイドバルブ25,26と、低圧リザーバ23からブレーキ液を吸い込む液圧ポンプ22と、によりポンプアップ液圧を発生する。ブレーキコントローラ7は、ブレーキ踏み上げ操作の際、少なくともマスターシリンダ13内のブレーキ液が低圧リザーバ23に流れ込むストローク位置S2から、ホイールシリンダ液圧の低下が終わるストローク位置S3までを含むストローク領域において、ペダルストロークの上昇に対して滑らかな勾配にて前記ホイールシリンダ液圧が増加するように両M/Cカットソレノイドバルブ25,26を制御する(図3)。
(もっと読む)
車両のブレーキングを制御するための方法
【課題】ブレーキペダルの動作の妨害といったようなブレーキング異常に対処すること。
【解決手段】モータ車両100のブレーキングを制御するための方法であって、ブレーキングシステム140の油圧に関連した情報を受領し;ブレーキペダル表面190に対して印加された圧力に関連した情報を受領し;ブレーキングシステムの油圧とブレーキペダル表面圧力との間の、測定されたブレーキング関係を決定し;所定のブレーキング関係を取得し;測定されたブレーキング関係と所定のブレーキング関係とを比較し;測定されたブレーキング関係が所定のブレーキング関係とは相違するものである場合には、モータ車両の速度を低減し得るよう構成されたブレーキング補助手段を起動する。
(もっと読む)
制動力制御装置
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置
【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
車両用制動力制御装置
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ操作時、ペダルストロークに対するホイールシリンダ液圧特性の段付きとペダル反力の変動を小さく抑えることで、ペダルフィールの違和感を緩和すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、マスターシリンダ液圧センサ24と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、ブレーキ液を吸い込んで吐出する液圧ポンプ22によりポンプアップ液圧を発生する。マスターシリンダ液圧センサ24は、運転者によるブレーキ操作速度を検知する。ブレーキコントローラ7は、ブレーキ操作速度が所定値以上の場合、ポンプアップ液圧によりホイールシリンダ4FL,4FR,4RL,4RRへの液圧を所定値まで増加させる際、ペダルストロークがリザーバポートの閉鎖位置に達するまでのポンプアップ液圧増加速度よりも、ペダルストロークがリザーバポートの閉鎖位置を通過した後のポンプアップ液圧増加速度を遅くする(図3)。
(もっと読む)
車両用制動力制御装置
【課題】ブレーキ操作時であって、マスターシリンダピストンの移動速度であるピストン速度が速いとき、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、乖離量算出部60と、ペダル踏力算出部61と、目標減速度算出部69と、を備える。乖離量算出部60は、プライマリピストン11のピストン速度が速いほど大きくなるペダル踏力の過渡的変化分を補正値Hとして算出する。ペダル踏力算出部61は、マスターシリンダ圧に基づくペダル踏力(e-ACT反力)を、補正値Hにより補正することで制御用ペダル踏力を算出する。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動制御の切換え時における車両の走行安定性の向上を可能とする。
【解決手段】左右の後輪RL,RRのスリップ率に応じてブレーキ油圧回路27により左右のホイールシリンダ25を同時に制御する制動力同時制御モードを実行可能な制動力同時制御モード実行部51と、左右のホイールシリンダ25を独立して制御する制動力独立制御モードを実行可能な制動力独立制御モード実行部52と、車両11の減速度が予め設定された減速度閾値を越えたら制動力同時制御モードから制動力独立制御モードへ切換可能な切換制御部53と、車両11の減速度勾配の上昇に応じて減速度閾値を低下させる切換閾値変更部54とを設ける。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、ブレーキパッドとロータとの間にクリアランス変化が発生しても、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧ユニットと、モータコントローラと、統合コントローラと、を備える。統合コントローラは、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、推定したブレーキパッドとロータとの間のクリアランス量が設計値のクリアランス量に対して変化する場合に、実MC圧発生ポイントでの目標減速度が、上乗せ制動分の最大値となるように、設計値からのクリアランス変化量に応じて目標減速度特性を設定する。
(もっと読む)
21 - 40 / 2,083
[ Back to top ]