
Fターム[3D246EA01]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 推進装置 (1,150)
Fターム[3D246EA01]の下位に属するFターム
エンジン (780)
電動モータ(回生作用を行うものを含む) (355)
Fターム[3D246EA01]に分類される特許
1 - 15 / 15
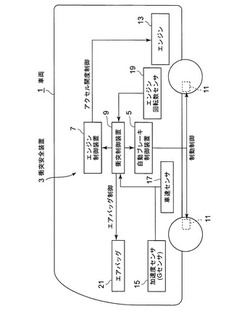
車両の衝突時安全装置
【課題】車両衝突時の二次被害を防止および軽減する衝突時安全装置に関し、エアバッグが展開しないような軽度の衝突時の安全策も含めて、簡単な制御によって二次被害を防止および軽減することを目的とする。
【解決手段】自動ブレーキ制御装置5と、エンジン制御装置7と、加速度センサ15と車速センサ17からの信号に基づいて、エアバッグ21、自動ブレーキ制御装置5およびエンジン制御装置7を制御する衝突制御装置9とを備え、衝突制御装置9は衝突時の加速度の大きさを基に重度衝突と軽度衝突とを判定し、重度衝突と判定した場合には、エアバッグを作動させると同時に、自動ブレーキをフルブレーキ状態とし且つエンジンを停止状態にし、軽度衝突と判定した場合には、エアバッグを作動させずに、自動ブレーキを衝突時の加速度に対応した中間ブレーキ力とし且つエンジンを停止状態にすることを特徴とする。
(もっと読む)
自動二輪車の制動装置

【課題】前輪のブレーキ操作力に適切なアシスト力を加えることにより、フロントサスペンションの伸び上がりをコントロールし、旋回性を良好にする。
【解決手段】前輪ブレーキのキャリパシリンダ8に連通路11、液圧制御部12を介してマスタシリンダ6を接続し、液圧制御部12には弁13を備え、コントロールユニット14にて開閉制御する。コントロールユニット14は車速センサ17より車速及び減速度を算出し、マスタシリンダ6に設けたマスタシリンダ圧検出センサ19よりブレーキ操作量を検出する。操作レバー5を放すと、コントロールユニット14はマスタシリンダ圧検出センサ19の検出する液圧低下に基づきブレーキ操作量の変化率を算出し、所定の割合を超えると弁13で連通路11を絞り、急激なキャリパ圧の低下を防いでブレーキ制動力を維持させ、フロントサスペンションの急な伸びを抑制し、コーナリングを容易にする。
(もっと読む)
ブレーキと間違え,アクセルを一気に踏み込んでしまった時,速やかにエンジンと車両を停止させるシステム
【課題】突然の飛び出しや身体をひねっての後退運転をする場合などで、ブレーキペダルと間違えてアクセルペダルを一気に踏み込んでしまい事故に至る場合がある。このような場合瞬時にエンジンを停止させ、同時にブレーキを作動させて車両の暴走を防ぎ事故を防止するための機構である。
【解決手段】ブレーキのつもりでアクセルペダルを一気に踏み込んだ場合、アクセルペダルに押されてスイッチが入り、そのスイッチの連動でイグニション回路や燃料ポンプ、あるいはコンピュータなどを停止させ、直ちにエンジンを停止させる。更に、スイッチの連動によって電磁式ブレーキを作動させて車両を停止させるものである。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
ハンドガイドローラ
【課題】振動式のハンドガイドローラにおいて、ロールの内部に油圧式の走行制動装置を設けるにあたり、走行油圧モータへの振動の負担を低減する。
【解決手段】防振部材よりもばね下質量側に、振動装置と、車体の両側に設けられ、ロール3を軸支するとともにこのロール3に振動装置からの振動を伝達する一対のサイドフレーム14と、一方のサイドフレーム14に取り付けられる走行油圧モータM2と、ロール3を制動する油圧式の走行制動装置31と、を備えたハンドガイドローラHにおいて、走行制動装置31を、走行油圧モータM2と別体に構成して、走行油圧モータM2を介さずにロール3を制動するように設けた。
(もっと読む)
自動車のアシスト式発進システムの動作状態を診断する方法およびシステム
制御式駐車ブレーキを装備する自動車のアシスト式発進システムの動作状態を診断する方法であって、車両情報の少なくとも1つの項目を計算するステップと、前記車両情報に関連づけられた有効性情報の少なくとも1つの項目が生成される有効性ステップとを含む。本方法は、駐車ブレーキをはずすためのコマンドの間に車両情報および関連有効性情報を不揮発性メモリに記録するステップと、診断情報の少なくとも1つの項目が、記録された情報の有効性の検証に基づいて作成される診断ステップとを含む。 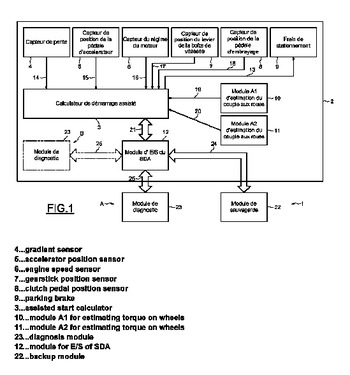 (もっと読む)
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両の進行方向に複数の障害物が存在する場合において、車両が各障害物のうち少なくとも1つの障害物と接触し得る緊急状態であるときには、該障害物との接触によって車両が被る損傷を小さくできる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】各ECUは、車両の進行方向に存在する各障害物のうち少なくとも1つの障害物に車両が接触する可能性がある場合(ステップS12が肯定判定)において、回避制御によって車両と各障害物との接触を回避可能であるとき(ステップS15が肯定判定)には、回避制御を実行する。一方、各ECUは、回避制御を実行しても車両が少なくとも1つの障害物に接触する可能性があるとき(ステップS15が否定判定)には、損傷低減走行軌跡55を設定し(ステップS19)、該損傷低減走行軌跡55に車両の実際の走行軌跡が接近するように損傷低減姿勢制御を実行する(ステップS20,S21)。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、自車両の車速を検出する車速検出手段3aと、自車両と先行車両との車間距離及び先行車両の有無を検出する車間距離検出手段3bと、車速を設定車速に制御する及び車間距離を車速で除して算出された車間時間を設定車間時間に制御する車両制御手段3dと、前方情報を取得する前方情報取得手段5aと、前方情報に基づいて自車両を車線内に維持するように操舵装置の転舵力を制御する操舵制御手段5bと、運転者の先行車両に対する追従意思を推定する推定手段3cを備え、車両制御手段3dによる制御と操舵制御手段5bによる制御が同時に行われており、かつ、推定手段3cが追従意思を推定しない場合に、車両制御手段3dが車速を転舵力が制限値となる制限車速以下Vrとする制限車速制御を行うことを特徴とする。
(もっと読む)
車両の制動装置
【課題】摩擦制動手段による摩擦ブレーキ力と油圧モータによる油圧ブレーキ力との作動制御を統一して行う。
【解決手段】油圧ポンプ32と、油圧ポンプ32からの油圧供給を受けて駆動される油圧モータ21L,21Rと、これら油圧モータの回転駆動力を受けて回転する鉄輪4L,4Rとを備えて軌陸式高所作業車1が構成される。この高所作業車1において、油圧力を用いて鉄輪を機械的に制動する油圧作動式の摩擦ブレーキ装置(41L,41R&43L,43R)と、入口ポートが油圧モータの吐出ポートに繋がって配設され、出口ポート側の油圧に応じて入口ポート側の油圧を調圧して油圧モータの吐出油圧を制御するカウンターバランスバルブ35と、出口ポート側の油圧を調圧するブレーキ制御バルブ36と、ブレーキ制御バルブにより調圧された出口ポート側の油圧をブレーキキャリパ43L,43Rに導くブレーキ油路55a,55bとを備えて構成される。
(もっと読む)
電気自動車の制動装置
【課題】簡単な構成により、摩擦制動力と回生制動力を併用して回生制動によるエネルギ回収量を増大させてエネルギ効率を向上できるようにした電気自動車の制動装置を提供する。
【解決手段】車両50を駆動するとともに、回生電力の発電により回生制動力を発生させる電動機4と、車両50の要求制動力に対応するブレーキ操作力の入力を受け付ける制動要求入力部材14と、制動要求入力部材11にブレーキ操作力が入力されると、入力されたブレーキ操作量又はブレーキ操作力に対応する要求制動力よりも小さい値の摩擦制動力を発生させる摩擦ブレーキ機構14と、要求制動力から摩擦制動力を減じた値だけ回生制動力を発生させるように電動機を制御する回生制動制御手段23とを有して構成する。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】車両の走行挙動に応じて、危険走行領域を回避して交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間などに基づいて、自車両が交差点の手前に停止するための停止条件及び交差点に進入するための進入条件により決定される危険走行状態にあるか否かを判定する。車載装置は、危険走行状態にあると判定した場合、運転操作履歴に基づいて、交差点で停止するか又は交差点を通過するかを判定する。車両を停止させる場合には、車両を緩やかな減速度で減速するための処理を行い、車両を通過させる場合には、車両を緩やかな加速度で加速するための処理を行う。
(もっと読む)
車両制御装置
【課題】複数のアプリケーションを備えた場合に、汎用性に優れた車両制御装置を提供すること。
【解決手段】ステップ210では、対象物選択処理を行う。ステップ220では、危険物判定処理を行う。ステップ230では、(加減速ECU3から受信した)ブレーキに関するドライバ操作加速度が、所定の判定値αより小さいか否か、即ち、ブレーキが不十分であるか否かを判定する。ブレーキが十分でない場合は、ステップ240に進み、ブレーキアシスト制御の実行要求フラグをオンにする。また、ドライバ操作加速度に所定値βをかけた値を目標加速度に設定する。一方、ブレーキが十分な場合は、ステップ250に進み、ブレーキアシスト制御の実行要求フラグをオフにし、目標加速度を0に設定する。ステップ260では、実行要求フラグ、目標加速度、Max Jerk、Min Jerkを、加減速ECU3に送信する。
(もっと読む)
線形誘導モーターを備える個別用高速輸送システムにおける制御及び安全制動方法及び装置
一つ以上のモーターを含む車両推進システムを含む個別用高速輸送システムにおける一つ以上の車両がトラックに沿って移動するとき、前記一つ以上の車両の車両速度を制御するための速度制御システムであって、それぞれのモーターは前記一つ以上の車両の中で一つの車両を推進するための推力を生成するようになり、個別用高速輸送システムにおける車両速度を制御するための速度制御システムは、前記一つ以上の車両の前記車両速度を制御するように、車両位置及び/または速度センサーから受信した一つ以上のセンサー信号に基づいて前記モーターの中で少なくとも一つのモーターによって生成された前記推力を制御するようになる速度調節サブシステム、及び前記一つ以上の車両の中でそれぞれの車両内に含まれて、前記速度調節サブシステムによる車両速度制御とは無関係に、前記車両上に装着された非常ブレーキを作動させるようになる車両制御システムを含む。 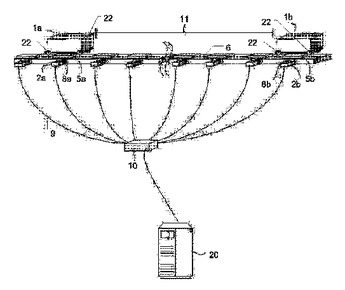 (もっと読む)
(もっと読む)
多車軸陸路車両用2段電気空圧制御式ブレーキシステム
次の構成部品、つまり、運行状態と緊急状態とに対応する2段のブレーキペダル(14)、各比例電磁制御弁EVP(9)を含む各車軸と連結される空圧ブレーキユニット(6)、運行状態と緊急状態でも同様にエンジンブレーキ(31)を電気的に制御するペダルの位置情報をこのペダルから受け取る少なくとも1台の減速制御装置UCD(12)、ペダルの空圧装置箱(19)からEVPを直接制御して緊急状態でのみ作動する空圧制御回路(10)からなるブレーキシステム(1)。この発明は特に乗客輸送用に計画される多車軸連結陸路車両に関係する。 (もっと読む)
妨害物をかわす際に衝突を回避するおよび/または衝突の結果を軽くするための方法および装置
車両を妨害物に対してかわす際に衝突を回避しおよび/または衝突結果を軽くするための方法および装置が提案され、その際少なくとも1つの周辺センサを用いて少なくとも1つの妨害物(3)が識別されかつ妨害物のデータが求められる。更に妨害物のデータ並びに車両のデータに基づいて、妨害物をかわす過程を支援するのに有利な車両減速度が求められかつ車両が相応に減速される。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]