
Fターム[3D246GA27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 制御の干渉防止 (68)
Fターム[3D246GA27]に分類される特許
1 - 20 / 68
車両の制動制御装置
【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
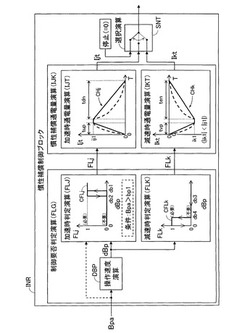
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償制御が必要であるか否かが判定される。慣性補償制御が必要であると判定された場合(FLj←1、又は、FLk←1)、ブレーキアクチュエータの最大応答に基づく予め設定された時系列のパターンCHj,CHkに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量が演算される。
(もっと読む)
車両の制動制御装置

【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。ブレーキアクチュエータの応答を表す時定数τmを有する遅れ要素DLY、及び、操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量Imtが演算される。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
車両用ブレーキ装置
【課題】一制動期間内でABS制御手段が作動し終了した後に再始動する見込みを増加させない範囲で回生制動力を発生し、従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】液圧ブレーキ装置と、回生ブレーキ装置と、目標取得手段、協調制御手段、およびアンチロックブレーキ制御手段を有する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材が継続して操作されている一制動期間内でアンチロックブレーキ制御手段が作動したときに、ABS制御期間が終了して協調制御手段が再始動した時点(時刻t4)の目標制動力FRを回生許可制動力FHと演算する最終値演算手段と、一制動期間内でABS制御期間が終了して協調制御手段が再始動した(時刻t4)以降に作動し、目標制動力FRが回生許可制動力FH未満であるときにのみ回生制動力FEの発生を許可する回生許可手段と、をさらに有する。
(もっと読む)
車両旋回挙動制御装置
【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】 開閉弁によって2系統の圧力供給系を切り替えるブレーキ・バイ・ワイヤの車両用ブレーキ装置において、ホイールシリンダへの液圧供給開始時に、開閉弁の作動を保証すると共にブレーキの操作感を向上させる。
【解決手段】 ブレーキペダル11と、電磁弁である開閉弁24a・24bを備えた配管42a・42bを介して互いに接続されたマスターシリンダ15及びホイールシリンダ2b・3bと、ペダル操作量検出手段11aと、電動モータ12を備えたモータ駆動シリンダ13と、バッテリ7と、バッテリの電圧を検出する電圧センサ段51と、制御手段6とを有する車両ブレーキ装置であって、制御手段は、電源の電圧が閾値電圧以上である場合には、ペダル操作量に基づいてモータ駆動シリンダの駆動を開始する際には、開閉弁を開いた状態に維持してモータ駆動シリンダの駆動を開始し、モータ駆動シリンダの駆動を開始の後に開閉弁を閉じることを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】制動のみによる障害物回避も精度良く確実に行うことができ、制動力に加えてドライバが操舵により旋回回避する際においても、ドライバが意図する十分な旋回運動により障害物を回避することができる信頼性の高い衝突防止制御を行う。
【解決手段】走行制御ユニットは、自車両と障害物との衝突可能性を判定し、自車両と障害物との衝突可能性が高いと判定された場合、障害物との衝突を防止する制動力を予め設定し、自動ブレーキ制御装置に信号出力して減速度を発生させるが、この際、ドライバの操舵を検出した場合には、発生させる制動力を低下補正する。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤ形式のブレーキ装置において流路抵抗によってVSA装置などの液圧制御装置の機能が低下することを防止する。
【解決手段】ブレーキ装置1を、ブレーキペダル11の操作量Psに対応して液圧を発生するマスターシリンダ15と、マスターシリンダ15とホイールシリンダ2b・3bとの間に配置される電磁弁24a・24bと、電磁弁24a・24bよりもホイールシリンダ2b・3b側に設けられ、ブレーキ液圧を発生するモータ駆動シリンダ13と、モータ駆動シリンダ13とホイールシリンダ2b・3bとを結ぶ油路22e・22f上に設けられ、ホイールシリンダ2b・3bに供給されるブレーキ液圧を制御するVSA装置26とを有し、VSA装置26の動作時に、電磁弁24a・24bを開放した状態でモータ駆動シリンダ13を所定の目標加圧モータ角θatをもって加圧側に駆動する制御ユニット6をさらに有するようにする。
(もっと読む)
車両制御装置
【課題】 カーブの走行安定性をより高めることができる車両制御装置を提供する。
【解決手段】 先行車と自車との相対関係を維持または設定された速度を維持するように自車の速度を制御するACC制御のACC指令値Gaccを演算するACC指令値演算部201と、自車に作用する横加加速度Gy'に基づき自車の速度を制御するGFC制御のGFC指令値Ggfcを演算するGFC指令値演算部202と、ACC指令値GaccまたはGFC指令値Ggfcのうち車両に作用する減速度の大きな指令値を選択する指令値選択部203と、選択されたACC指令値GaccまたはGFC指令値Ggfcに基づいてブレーキ液圧ユニット101およびエンジン121を駆動し自車の速度を制御する速度制御部204と、を備えた。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
自動車
【課題】インバータの複数のスイッチング素子の一部を含む閉回路が形成される閉回路異常が生じている状態でイグニッションオフされた後に、その閉回路異常に起因する不都合が生じるのを抑止する。
【解決手段】閉回路異常が生じている状態でイグニッションスイッチ60がオフされたときには、駆動輪39a,39bおよび従動輪39c,39dに制動力が付与されるようブレーキアクチュエータ42を制御する。これにより、閉回路異常が生じている状態でイグニッションスイッチ60がオフされた後に、閉回路に電流が流れるのを抑止することができ、閉回路異常に起因する不都合が生じるのを抑止することができる。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び制御対象車輪の全てについてのトラクション制御の両者が同時に行われる場合に、駆動要求が満たされない不満を運転者が感じる虞れを低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回補助制御の実行中にトラクション制御によって全ての制御対象車輪の前後力が低減される状況に於いては、旋回補助制御による旋回内輪の前後力の低減量を小さくし、或いは旋回補助制御による旋回内輪の前後力の低減を中止する。これにより旋回内輪の前後力の低減量が減少する量にて車両全体の駆動力が増大される。
(もっと読む)
車両用ブレーキ装置
【課題】回生ブレーキ装置における回生可能制動力を知りつつ制動制御を行うことで、良好な制動フィーリングおよび高い回生効率が得られる車両用ブレーキ装置を提供する。
【解決手段】液圧制動力を車輪に付与する液圧ブレーキ装置と、発電電動機に駆動される駆動輪に回生制動力を付与する回生ブレーキ装置と、液圧制動力および回生制動力を協調制御する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、発電電動機に指令した回生要求制動力FRから発電電動機が実行した回生実行制動力FGを減算して差分量DFを演算する手段(S9)と、回生要求制動力FRが発電電動機の実行可能な回生可能制動力FX(FXU、FXL)の範囲内であるか否かを判定する手段(S11)と、差分量DFが正でかつ回生要求制動力FRが回生可能制動力FXの範囲内である場合に液圧制動力FCの増加を抑制する手段(S12)と、を有する。
(もっと読む)
衝突被害軽減装置
【課題】車両が障害物に衝突するおそれがある場合にブレーキを自動的に作動させる衝突被害軽減装置の作動精度を向上すること。
【解決手段】車両1が進行方向上の障害物に衝突するおそれがあると判定した場合に、車両1のブレーキ2を自動的に作動させる衝突被害軽減装置100であって、車両1の進行方向の画像を撮像するカメラ10と、カメラ10によって撮像され画像から車両1が走行車線を逸脱するか否かを判定する車線逸脱判定部42とを備え、車線逸脱判定部42によって車両1が走行車線を逸脱すると判定された場合には、ブレーキ2の自動的な作動を停止することを特徴とする。
(もっと読む)
1 - 20 / 68
[ Back to top ]