
Fターム[3D246GB12]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 制動力配分制御 (173) | 前後ブレーキ力配分 (103)
Fターム[3D246GB12]に分類される特許
1 - 20 / 103
制動力制御装置
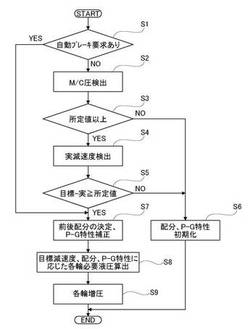
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
ブレーキシステム

【課題】 連動ブレーキシステムとABSを採用した自動二輪車において、ブレーキレバーを単独操作して前輪ブレーキに制動力を発生させた状態で前輪ABSが作動したときの減速度を大きくする。
【解決手段】 ブレーキバイワイヤ方式の連動ブレーキシステムにおいて、ブレーキレバーのみから入力したとき前輪ブレーキに制動力を発生させるとともに、後輪ブレーキにも連動した制動力を発生させる。この状態で前輪ABSが作動すると、前輪ブレーキの制動力が一定となり、トータル制動力は.△Frだけ低下する。そこで、後輪側液圧モジュレータ22Rを駆動して、後輪ブレーキの制動力を理想配分特性によって定まるて後輪限界目標圧Prmaxに向けて増大させる。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
自動二輪車用ブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】第2モード第1区間の始点から第2モード第2区間の終点までの間の途中の点Pmで、操作量に対する前輪の制動力の増加率を、変化させる。点Pmまでの操作量の増加率は、曲線の傾きα1で表すことができる。点Pm以降の操作量の増加率は、曲線の傾きα2とする。好ましくは、α1<α2に設定する。
【効果】途中までの増加率より、途中以降の増加率を大きく設定することで、操作量に車体発生源速度を一次比例させることができる。操作量に車体発生源速度を一次比例させると、制動の初期(操作量が小さいとき)においては姿勢制御優先で前後輪の制動力の変化量を小さくすることができ、制動の後半(操作量が大きいとき)においては制動作用が優先される。
(もっと読む)
自動二輪車のブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】公道走行とサーキット走行などのような走行環境変化や、乾いた路面と濡れた路面のような路面状況変化に対応可能な第1制御モードと第2制御モードを備える。そして、モード切替手段26を、右グリップ27より車体中心側に、上位のキルスイッチ28と下位のスタータスイッチ29との間に配置する。モード切替手段26で、第1制御モードと第2制御モードを切り替える。
【効果】第1制御モードと第2制御モードを任意に切替えることで、走行環境変化に対応した自動二輪車の制動制御が可能となる。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
ブレーキ制御装置
【課題】 アクチュエータの作動頻度を抑制できるブレーキ制御装置を提供すること。
【解決手段】 ポンプ9の吐出側と車両の各輪FL等のホイルシリンダ5との間に設けられた増圧弁6と、開弁することでホイルシリンダ5からブレーキ液を排出可能に設けられた減圧弁7と、ポンプ9、増圧弁6、及び減圧弁7の作動を制御して各ホイルシリンダ5内の液圧を制御する内部コントロールユニット20と、を備えたブレーキ制御装置において、内部コントロールユニット20は、車両の走行状態を制御するための基本制動液圧を各輪FL等のホイルシリンダ5に発生させている状態で、車両の目標ヨーモーメントがゼロから有意値に変化した場合、少なくとも1つの配管系の複数のホイルシリンダ5間で液圧差を生じさせると共に、この配管系の低圧側のホイルシリンダ5に対応する増圧弁6を閉じてこのホイルシリンダ5の液圧を保持する。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
車両用制動装置
【課題】従来の制動装置を大幅に変更することなく、回生協調制御を実行可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36およびセカンダリピストン33が移動可能に設けられており、これにより、プライマリ室PCおよびセカンダリ室SCが形成されている。プライマリ室PCとABSアクチュエータ5との間には、差圧弁91が設けられている。パワー液圧源7からの駆動液圧が駆動室DCに供給されると、プライマリピストン36およびセカンダリピストン33がシリンダ部311内を移動し、プライマリ室PCおよびセカンダリ室SCに液圧が発生する。プライマリ室PCの液圧は差圧弁91によって減圧され、初期制動において、後輪側のホイルシリンダWC3,WC4の液圧は、前輪側のホイルシリンダWC1,WC2よりも低く設定される。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの改良を図る。
【解決手段】共通通路62には、増圧リニア式制御弁70,後輪ブレーキシリンダ30,増圧ONOFF式制御弁72,前輪ブレーキシリンダ28が、この順に接続される。また、後輪ブレーキシリンダ30と増圧ONOFF式制御弁72との間に流れ制限装置122が設けられ、増圧ONOFF式制御弁72を経て共通通路62に供給された作動液が後輪ブレーキシリンダ30に供給され難くされている。その分、前輪ブレーキシリンダ30に供給され易くされるのであり、前輪ブレーキシリンダ30に大きな流量で作動液を供給することができる。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両走行制御装置及びその方法
【課題】アンダステア抑制制御中の車両のタックインの発生に起因する制動力制御が運転者に違和感を与えてしまうのを防止する。
【解決手段】車両走行制御装置は、アンダステア抑制制御中のアクセルペダルの操作状態を基に、車両のタックインの発生を推定するタックイン推定部16と、タックイン推定部16がタックインが発生すると推定したとき、アンダステア抑制制御による前後輪の制動力を減少させて前後輪の制動力の付与を解除する減少勾配算出部17及びブレーキ液圧算出部18と、を有し、減少勾配算出部17及びブレーキ液圧算出部18は、前後輪の制動力配分を後輪寄りに設定して前後輪の制動力を減少させる。
(もっと読む)
車両の坂道発進支援ブレーキ装置およびその制御方法
【課題】運転者の操作を介さずに坂道等で停車状態を維持するのに必要なブレーキ力を保持するための方法を提供する。
【解決手段】本発明の一実施形態によれば、車両の停止中に車両の制動力を制御する方法が提供される。本方法は、(a)車両の停止を検出するステップと、(b)運転者によるブレーキ入力解除を検出するステップと、(c)運転者によるブレーキ入力解除時の車両の総ブレーキ力を算出するステップと、(d)車両の停止維持に必要なブレーキ力を計算するステップと、(e)算出された総ブレーキ力で車両の停止を維持できるかどうかを判断するステップと、(f)測定された総ブレーキ力で車両の停止を維持できないと判断されたときに、車両の総ブレーキ力を増加させるステップと、を有する。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
制動制御装置
【課題】車輪間の制動力のばらつきを抑制しつつ、異常発生時にも適切な制動力を発生可能な制動制御装置を提供する。
【解決手段】第1のポンプは、右前輪ホイールシリンダ圧を増圧させて右前輪に制動力を与える。第2のポンプは、左前輪ホイールシリンダ圧を増圧させて左前輪に制動力を与える。目標液圧決定部は、制動要求を取得したとき、右前輪目標液圧および左前輪目標液圧を決定する。目標液圧決定部は、右前輪の制動力と左前輪の制動力の一方が他方よりばらつき条件を満たすほどの方が小さいと判定した場合、高い方の制動力を低い方の制動力に近づけるよう目標液圧を低減させる補正を実行する。目標液圧決定部は、右前輪および左前輪のいずれかにおいて目標液圧に対する実液圧の未達度合いが異常判定条件を満たす場合、第1のポンプまたは第2のポンプに異常が生じたと判定し、前輪左右差補正を回避する。
(もっと読む)
1 - 20 / 103
[ Back to top ]