
Fターム[3D246GB17]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 路面状況対応 (331)
Fターム[3D246GB17]の下位に属するFターム
摩擦係数 (136)
路面傾斜 (147)
悪路、凹凸 (22)
部分低μ路、段差、ハイドロプレーニング (5)
Fターム[3D246GB17]に分類される特許
1 - 20 / 21
路面分析
【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
ブレーキ装置

【課題】車両の駐車場所がスプリットμ路面であるか否かを判定できるブレーキ装置を提供する。
【解決手段】ディスクブレーキ21を構成する取付部材に歪センサ37を設ける。歪センサ37は、取付部材の歪に基づいて、ディスクブレーキ21のブレーキ力を検出する。駐車ブレーキ用コントローラ38は、駐車ブレーキの作動時に、左側の後輪3のディスクブレーキ21のブレーキ力と左側の後輪3のディスクブレーキ21のブレーキ力とを比較し、これら左,右のブレーキ力Bに差がある場合に、左側の後輪3と右側の後輪3とがスプリットμ路面の勾配路に駐車されていると判定する。
(もっと読む)
路面状態推定方法
【課題】走行中の雪路を更に細分化して推定することのできる路面状態推定方法を提供する。
【解決手段】加速度センサー、路面温度計、及び、マイクロフォンにより、タイヤのタイヤ周方向振動、路面温度T、及び、タイヤ発生音をそれぞれ検出するとともに、タイヤの振動のデータから、踏み込み前領域R1の帯域値P11,P12,P13と、踏み込み領域R2の帯域値P21,P22,P23と、蹴り出し前領域R3の帯域値P31,P32,P33と、蹴り出し領域R4の帯域値P41,P42と、蹴り出し後領域R5の帯域値P51,P52,P53とを算出し、タイヤ発生音のデータから低周波帯域のバンドパワー値PAと高周波帯域のバンドパワー値PBとの比である音圧レベル比Q=(PA/PB)を演算し、帯域値Pijと、路面温度Tのデータと、音圧レベル比Qと、車輪速のデータとを用いて、路面状態を推定する。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車速制御装置
【課題】路面の摩擦係数が低い状況で車速制御を行う場合に、制駆動力制御が頻繁に繰り返されることを防止し、路面状況に応じた適切な車速制御を行う。
【解決手段】車速制御装置は、運転者などにより設定された設定速度を超えないように車両の速度を制御し、一旦設定された設定速度を変更する手段を備える。制駆動力制御は、車両挙動安定化制御又はトラクション制御の少なくとも一方である。制駆動力制御が実行された場合には、変更手段により設定速度が変更される。路面摩擦係数が低く滑りやすい路面などを車速制御しながら走行中に、制駆動力制御が実行された場合には、路面状況などに対して設定速度が高すぎると推測し、設定速度を変更する。これにより、車速が設定速度に到るまで運転者がアクセルを踏み続けることにより、頻繁に制駆動力制御が作動することが防止される。
(もっと読む)
車両運動制御装置
【課題】横転抑制効果をより高くできるようにする。
【解決手段】車両運動制御として横転抑制制御を実行する際に、旋回外側前輪および旋回内側前輪の両方に横滑りを発生させられる制動力となるように目標W/C圧Pto、Ptiを設定し、制動力を増加させる。これにより、旋回外側前輪に加えて旋回内側前輪も横滑りさせることができる。このように、旋回外側前輪だけでなく、旋回内側前輪についても積極的に横滑りさせることで、より車体のロールを抑制することが可能となり、車両の横転を抑制することが可能となる。
(もっと読む)
運転支援システム
【課題】歩行者などに対する水跳ねが発生しないような浅い水溜りで不要な運転支援が実行されることを防止し、制御精度の向上が図られた運転支援システムを提供する。
【解決手段】路面の高度差に関する情報を取得する路面高度差取得手段11と、降雨を検出する降雨検出手段12と、降雨検出手段12が降雨を検出した場合において路面高度差取得手段11によって取得された路面の高度差が所定値以上である道路上の地点に、運転支援を行う運転支援手段13とを備える運転支援システム1とする。これにより、降雨の有無と路面の高度差とに応じて水溜りができる可能性の高い地点を判定し、この判定された地点に車両が接近する場合に運転支援を行うことが可能となる。その結果、水跳ねが発生しないような浅い水溜りに接近する場合における運転支援の実行を防止することができる。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
路面摩擦係数推定装置およびアンチスキッド制御装置
【課題】M/C圧センサの検出結果を用いて路面摩擦力推定を行う場合において、より正確な路面摩擦力推定が行えるようにする。
【解決手段】M/C圧センサ80の検出信号に基づいて演算した路面摩擦力推定値(1)を基本的には使用しつつ、車輪速度センサ81〜84の検出信号に基づいて演算した路面摩擦力推定値(2)と比較することで、路面摩擦力推定値(1)を補正する。具体的には、M/C圧センサ値に基づいて演算される推定W/C圧値を補正することにより、路面摩擦力推定値(1)を補正する。これにより、ABS制御中に路面摩擦力推定値(1)が正確な値でなくなるような状態になったときにも、路面摩擦力推定値(1)を路面摩擦力推定値(2)に基づいて補正できる。したがって、M/C圧センサ80の検出結果を用いて路面摩擦力推定を行う場合において、より正確な路面摩擦力推定を行うことが可能となる。
(もっと読む)
駐車支援システムおよび駐車支援装置
【課題】駐車枠の形状等の、駐車区画毎の特性に応じた適切な駐車支援を実行することのできる駐車支援装置を提供すること。
【解決手段】駐車場情報提供装置は、所定の駐車場の駐車区画の特性を示す情報である特性情報を記憶している。駐車支援装置は、当該特性情報の送信を要求する信号である特性要求を駐車場情報提供装置に送信する。駐車場情報提供装置は、当該特性要求の送信元に、上記特性情報を送信する。駐車支援装置は、当該特性情報を受信する。そして、当該特性情報に基づいて所定の駐車支援制御処理を実行する。
(もっと読む)
車両用走行制御装置及び走行制御方法
【課題】インフラ協調システムにより提供された情報に従って、複数の車線を含む道路において、複数の車両の停止位置を車両毎にずらして停車させること。
【解決手段】インフラから提供されたインフラ提供情報に基づいて、停止制御を行う車両用走行制御装置に、インフラ提供情報に基づいて、自車両用走行制御装置が搭載された車両が走行する走行車線における停止位置を求める停止位置算出手段と、停止位置算出手段により求められた停止目標位置に従って、該停止目標位置への停止制御を行う停止制御手段とを有することにより達成される。
(もっと読む)
不充分な通過可能高さ又は不充分な通過可能幅を持つ障害物を警告する方法及び装置
【課題】小さすぎる通過可能高さ又は小さすぎる通過可能幅を適時に運転者に警告する。
【解決手段】通過にとって重要な障害物のデータを求めるため、前にある頭上障害物又は前にある側方障害物及びそれぞれの車道表面が走査され、求められた障害物の通過にとって重要なデータが、車両の通過にとって重要なデータと比較され、車両の通過にとって重要なデータが、障害物の通過にとって重要なデータを上回るか又はそれと同じである場合、警告信号が運転者に与えられる。
(もっと読む)
作業車
【課題】本発明は、湿田や雪路で作業するトラクタやホイルローダ等の作業車において、変速や旋回を安全に行えるようにすることを課題とする。
【解決手段】前輪2とクローラ走行装置6への動力伝動を断続するクラッチ70と、前輪2及びクローラ走行装置6を制動するブレーキ88を油圧制御によって作動制御する作業車において、前記クラッチ70とブレーキ88の利き具合を通常よりも緩やかに作動制御する雪路制御モードに移行する雪路スイッチ80を設けたことを特徴とする作業車の構成とする。
(もっと読む)
安全運転支援方法、車載端末装置、及び運転支援プログラム
【課題】
ドライバの運転操作性を損なうことなくドライバが危険な運転を行おうとした場合には安全運転支援を行う。
【解決手段】
予防安全装置120、130が作動した時、或いは予防安全装置120、130を作動させる車輪速センサ121、ヨーレートセンサ122、ブレーキ圧センサ123のセンサ値が予め設定した閾値を越えた場合に、坂道、非舗装道路、カーブ、駐車場、交差点などの走行場所と、絶対時間、降雪情報、降雨情報、外気温などの走行環境と、車両速度などの車両状態とを車両端末110内の記憶部に記憶しておき、車両が記憶された走行場所を記憶された走行環境下と車両状態で走行しようとした場合に、車載端末110はドライバへの警告通知または車両減速制御によって安全運転支援を行う。
(もっと読む)
ブレーキ力検出装置
【課題】 ブレーキをかけた方向にかかわらず常に正確なブレーキ力を検出可能なブレーキ力検出装置を提供することである。
【解決手段】 ブレーキ力検出装置であって、キャリパブラケットに生じるブレーキ時の歪を検出する歪ゲージと、歪ゲージの検出値からブレーキ力を算出するブレーキ力算出手段と、今回のブレーキが前進状態におけるブレーキか、後退状態におけるブレーキかを判別する前進・後退ブレーキ状態判別手段とを含んでいる。ブレーキ力算出手段は、前回のブレーキと今回のブレーキが同一方向の場合は、前回のブレーキと今回のブレーキが反対方向の場合に対して、同一の検出値に対して算出されるブレーキ力が低くなるように補正する補正手段を含んでいる。
(もっと読む)
車両用走行制御装置
【課題】カーブにおいてドライバの運転感覚に合った車速制御を行う車両用走行制御装置を提供することを課題とする。
【解決手段】車両の車速制御を行う車両用走行制御装置であって、走行路がカーブであるか否か検出するカーブ検出手段と、カーブ検出手段で検出したカーブにおける入口側で減速制御を行う減速制御手段と、カーブ検出手段で検出したカーブにおける出口側で加速制御を行う加速制御手段とを備え、カーブ検出手段で検出したカーブにおける道路環境情報(道路種別など)及び/又は自車情報(燃料残量など)に基づいて目標加速度及び/又は目標減速度を設定することを特徴とする。
(もっと読む)
路面状態推定装置
【課題】タイヤ内で発生する空洞共鳴音を抑制して路面状態を精度よく検出する。
【解決手段】タイヤ気室5を蓋部材4によりタイヤ主気室6と副気室7とに分離し、かつ、上記タイヤ主気室6と副気室7とを連通する連通孔8を設けて、ヘルムホルツ共鳴吸音器を備えたホイール1を構成するとともに、リム3のウエル部3wに、圧力センサ,バッテリ,センサ駆動回路,無線送信回路などが1つのケース内に収納されたバルブ固定型圧力センサユニット10を取付け、検出されたタイヤ内圧の微小圧力変動の信号を図示しない車体側に送信して、上記微小圧力変動の信号を周波数分析し、所定の周波数帯域内での圧力変動値を算出し、この算出された圧力変動値から走行時の路面状態を推定するようにした。
(もっと読む)
計測装置及び車両制御装置並びに警報装置
【課題】路面状態を定量的に検知可能に装置を構成し、好適な車両制御を実現すること。
【解決手段】車両制御システム1は、第一発光デバイス111から波長λ1のレーザ光を発射して路面に照射し、第二発光デバイス121から波長λ2のレーザ光を発射して路面に照射する。また、第一受光デバイス117で第一発光デバイスから発射されたレーザ光の反射光を受光し、受光強度R1を第一受光処理回路118からマイコン130に入力すると共に、第二受光デバイス127で第二発光デバイスから発射されたレーザ光の反射光を受光し、受光強度R2を第二受光処理回路128からマイコンに入力する。そして、強度比S=R1/R2と、入射角度θvと、波長λ1での水の吸収係数α1と、波長λ2での水の吸収係数α2と、に基づき、式d=lnS/{2×|α2−α1|/sinθv}に従って、道路表面の水の層厚dを算出し、これに基づき、ブレーキ油圧等を制御する。
(もっと読む)
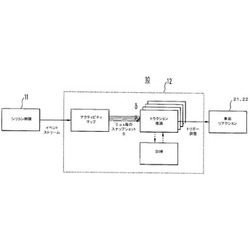
車両の安定性を改善するための車両システムの制御方法
車両の安定性を制御する改良方法が、アクティブヨーコントロールシステム、アンチロックブレーキングシステムおよびトラクションコントロールシステムといった車両安定性制御システムの協調動作によって提供される。これらの方法は、路面摩擦係数μ、車輪スリップおよびヨー偏差を含む路面情報の認識を使用する。該方法は、引き続き、必要に応じて、アクティブダンピングシステムの設定及び/又は駆動トルクの配分を修理して、サスペンションにおけるダンピングを増加/低減させ、かつ車輪でのトルク適用をシフトさせ、それにより車両における著しい荷重のシフトを防ぎ、及び/又は車両ドライバビリティおよび快適性を改善する。アクティブダンピングシステムまたはトルク配分の調整は、予め運転者によって選択されたいずれかの特性を一時的にオーバライドする。  (もっと読む)
(もっと読む)
車両の駆動車輪の改善された横すべり防止装置、およびその実施方法
車両、特に自動車の駆動車輪の横滑り防止装置であり、−駆動車輪(10)のブレーキ装置(16)、−決められた制御指示に対して、制御値との差異(Δv)の情報を関数として、ブレーキ装置(16)に指令信号(Cf)を送るトルクレギュレーター(12)、−制御開始(In)の情報をトルクレギュレーター(12)に送る指令装置(20)、でなっている。指令装置(20)は、駆動車輪の接地力と速度、地面の坂および/または横傾斜など、全ての地面での車両発進のパラメーターに基づいて制御開始(In)の情報を送る手段を有している。適用は、自動車の車輪の横滑り防止装置である。 (もっと読む)
1 - 20 / 21
[ Back to top ]