
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
201 - 220 / 250
車両操作支援装置
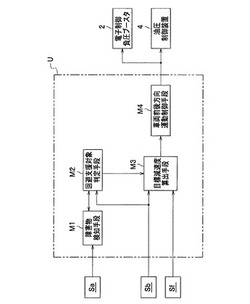
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】障害物の回避を支援する車両操作支援装置Uにおいて、自車に対する障害物を検知し、その検知結果を用いて当該障害物と自車との相対距離および相対速度を少なくとも含む移動状態を検出する障害物検知手段M1と、障害物検知手段M1が検知した障害物が、回避支援の対象となるか否かを、障害物検知手段M1が検出した相対距離、相対速度および車速センサSbで検出した自車の速度を用いて判定する回避支援対象判定手段M2と、回避支援対象判定手段M2による判定に応じて前記自車の制動制御を行なう制動装置制御手段(M3,M4)とを備える車両操作支援装置Uとする。
(もっと読む)
液圧ブレーキ装置

【課題】
自動ブレーキ中に運転者がブレーキ操作を行った場合においても、運転者の要求通りのブレーキ力を発生させることができるようにする。
【解決手段】
第1の制御処理は、インプットロッド7の変位量に比例ゲインを乗じた量だけプライマリピストン40を変位させる制御処理である。第2の制御処理は、所定のオフセット量だけプライマリピストン40を推進させたうえで、第1の制御処理を実行する制御処理である。第3の制御処理は、特に減圧要求時に、インプットロッド7の変位量に比例ゲインを乗じた量だけプライマリピストン40を変位させる制御処理である。ブレーキ力制御装置2は、自動ブレーキ中に運転者がブレーキ操作を行った場合に、自動ブレーキの解除条件、運転者のブレーキ要求等に基づいて、プライマリピストン40の制御処理を第1〜第3の制御処理から適切に選択し、実行する。
(もっと読む)
車両の障害物検知装置
【課題】レーダユニット1を備えた障害物検知装置において、そのレーダユニット1が誤検知した障害物に対してブレーキ作動手段21等の作動機器(ブレーキ作動手段21、シートベルトプリテンショナ22)が作動するのを出来る限り防止する。
【解決手段】レーダユニット1が検知した障害物が誤検知によるものであるか否かを判定して、誤検知によるものであると判定したときに、そのレーダユニット1が誤検知した場所である誤検知場所を検出して誤検知場所記憶手段(記憶装置19)に記憶しておき、自車両がその記憶した誤検知場所を走行していると判定したときに、作動機器の制御を停止する等して、レーダユニット1が検知した障害物に対してブレーキ等の作動機器を作動させないようにする。
(もっと読む)
作動状況報知装置
【課題】作動した走行支援装置を乗員が容易に認識することができるようにする。
【解決手段】車両に搭載され、アンチロック・ブレーキ・システム、ビークル・スタビリティ・アシスト・システム、トラクション・コントロール・システム、追突軽減ブレーキ・システムなどで構成された走行支援装置11の作動状況を報知する作動状況報知装置1であって、車両の乗員の心拍を検出する心拍検出装置12を備え、走行支援装置11の作動終了後、心拍検出装置により検出された心拍に基づいて算出された心拍数と、作動前の心拍数との偏差が所定範囲内である場合に、作動した走行支援装置11を運転者に報知する。
(もっと読む)
自動制動制御装置
【課題】安価であり簡単な方法を用いて衝突の発生を検出する。
【解決手段】自動制動制御手段が制動制御を開始したときに、フロントバンパに設けられた照明機器を稼働状態にし、制動制御を開始した後に、照明機器の障害を検出したときには自車と先行車との間の距離が零メートル(すなわち衝突状態)と判断する。
(もっと読む)
検出装置および方法、並びに、プログラム
【課題】車両の制御に必要な情報を、状況に応じて効率よく検出する。
【解決手段】想定状況選択部143は、状況情報入力I/F回路141を介して、状況情報取得部111から取得した状況情報、および、想定状況選択テーブル171に基づいて、予め想定されている複数の想定状況の中から、自車が置かれている状況に最も近い想定状況を選択する。検出処理選択部151は、選択された想定状況、および、検出処理選択テーブル172に基づいて、対象検出部145の各検出部が実行することができる検出処理の中から、実際に実行する検出処理を選択する。本発明は、車載用の画像処理装置に適用できる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車輪ブレーキ側の液圧路の迅速な加圧を可能にし、実液圧を目標液圧に近づける。
【解決手段】ポンプ4、ポンプ4を駆動するモータ9と、調圧弁Rに流す電流を目標液圧に応じて制御する制御部20を備える車両用ブレーキ液圧制御装置である。制御部20は、車輪ブレーキFR,FL,RR,RLの目標液圧を液量に換算し、この液量から必要流量を計算する手段と、計算した必要流量から、ポンプ4の能力に基づいてモータ9の必要回転数を計算する手段と、必要回転数が、検出または推定して得られたモータ9の実回転数を超えた場合には、調圧弁Rに流す電流を所定量高くする手段とを備える。
(もっと読む)
制駆動力制御装置
【課題】道路形状を含む走行環境に基づいて制駆動力を補正する制駆動力制御において、運転者の意図に沿わない制駆動力制御となることを抑制することが可能な制駆動力制御装置を提供する。
【解決手段】走行環境(S101)及び外部情報(S103)に基づいて制駆動力を制御する制駆動力制御装置であって、現在エリアよりも先方の状況に基づく加減速の必要性を判定する判定手段(S104)と、前記現在エリアの状況に基づく制駆動力制御の制御量を求める手段(S102)と、前記判定手段により前記必要と判定された加減速の向きと、前記求められた前記制駆動力の制御量の加減速の向きとが異なる場合(S104−Y)には、前記必要と判定された加減速の向きと、前記求められた前記制駆動力の制御量の加減速の向きとが異ならない場合(S104−N)に比べて、前記求められた前記制駆動力の制御量を低減させる手段(S111)とを備えている。
(もっと読む)
車両走行制御装置
【課題】交差点や分岐点でもカーブ情報を用いて適切な走行制御を行うことができる車両走行制御装置を提供することを課題とする。
【解決手段】車両走行制御装置1であって、走行路前方のカーブに関するパラメータを検出するカーブパラメータ検出手段31aと、カーブパラメータ検出手段31aで検出したカーブパラメータ(カーブRなど)に基づいて自車の走行状態を制御する走行制御手段20,21,22と、走行路前方の道路形状(交差点、分岐点など)を検出する道路形状検出手段10と、道路形状検出手段10で検出した道路形状に基づいてカーブパラメータの走行制御への影響度を設定する影響度設定手段31aとを備えることを特徴とする。
(もっと読む)
車両制御装置
【課題】信号情報を利用して車両を制動制御する車両制御装置において、制動制御時における先行車両と自車両との急接近を防止しドライバに不安感を与えるおそれを低減することが可能な車両制御装置を提供する。
【解決手段】信号情報を利用して自車両Mを停止させる制動制御を行う車両制御装置1である。この車両用制御装置1は、自車両Mの先行車両Nを検出する先行車両検出部12と、先行車両Nが前方の交差点に進入する進入時の車両用信号機SVの表示を推定する信号表示推定部13と、その車両用信号機SVの表示が停止信号を示すと推定される場合に、自車両Mの加速を制限する加速制限部14と、を備える。
(もっと読む)
車両制御装置
【課題】制動制御後において車両が経路方向とは異なる方向へ発進するおそれを低減することが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、車両を停止させる制動制御を行った後、所定のタイミングで制動制御を解除する制動制御部11を備えている。さらにこの車両制御装置1は、制動制御後に、車両が走行する経路方向を取得する経路方向取得部12と、その制動制御を解除した後の車両の進行方向を推定する進行方向推定部13と、を備え、制動制御部11は、経路方向と進行方向との偏差が所定値よりも大きい場合にその制動制御を保持する。
(もっと読む)
車両用衝突緩和装置
【課題】車両用衝突緩和装置がブレーキアシスト制御機能及び自動ブレーキ制御機能を備える場合に、後続車両との衝突を回避、あるいは少なくとも衝突による衝撃を緩和する。
【解決手段】衝突予測時間TTCとそれぞれ比較される、警報基準時間、ブレーキアシスト基準時間、及び自動ブレーキ基準時間について、警報基準時間を、ブレーキアシスト基準時間以上であって、自動ブレーキ基準時間よりも長く設定した。衝突予測時間TTCが、警報基準時間を下回ると、自車両の運転者に前方障害物との衝突のおそれがあることを警報するとともに、後続車両の運転者に自車両が急減速する可能性が高いことを警報する。これにより、運転者のブレーキ操作による制動力を増大させるブレーキアシスト制御、もしくは、自動ブレーキ制御によって自車両が急減速される状況において、原則、その急減速が行われるよりも早いタイミングで、後続車両への警報を行うことが可能となる。
(もっと読む)
衝突予測装置
【課題】衝突予測精度の向上を図った衝突予測装置を提供すること。
【解決手段】他車両104の複数位置の物標点P1〜P5を各々検出し、各物標点P1〜P5について予測した衝突部位に基づいて自車両102と他車両104との衝突態様を予測する。これにより、複数位置の物標点P1〜P5を各々検出して、各物標点P1〜P5について衝突部位を予測しているので、他車両104の限られた点(従来の代表点)だけでなく、他車両104の複数位置について自車両102のどの部位に衝突するのかを予測することができる。従って、従来のグルーピング処理において、代表点P1,P3に包括されて物標出力されていなかったメンバーP2,P4,P5情報を有効活用することで、衝突予測精度を向上させることができる。
(もっと読む)
車両挙動制御装置
【課題】 車両の絶対的な挙動と、相対的な挙動の両方を適正に制御可能な車両挙動制御装置を提供すること。
【解決手段】 ブレーキペダルとは別に設けられマスタシリンダを作動させてホイルシリンダを加圧する第1の昇圧部と、マスタシリンダを介さずにホイルシリンダを加圧する第2の昇圧部と、昇圧部を制御するコントロールユニットと、を備え、コントロールユニットには、自車両と周囲との相対的な関係に基づく第1の動作指令と、自車両の絶対的な挙動に基づく第2の動作指令とが入力され、入力された指令が第1の動作指令の場合、第1の昇圧部を作動させると共に、入力された指令が第2の動作指令の場合、第2の昇圧部を作動させ、第1の動作指令が入力されて前記第1の昇圧部が作動しているときに第2の動作指令が入力された場合、第1の昇圧部に加え、第2の昇圧部を作動させる。
(もっと読む)
自動制動システム
【課題】自動制動用ストップランプ回路の故障診断を後続車両に違和感や煩わしさを与えることなく実施でき後続車両への影響を低減可能な自動制動システムを提供する。
【解決手段】ストップランプ装置は、手動制動に連動したスイッチがオン側に切り換えられることで閉成されてストップランプを点灯させる第1のストップランプ回路(手動制動用ストップランプ回路)と、自動制動に伴いリレーがオン側に切り換えられることで閉成されてストップランプを点灯させる第2のストップランプ回路(自動制動用ストップランプ回路)と、自動制動に拘わらずリレーに疑似信号を供給することで上記第2のストップランプ回路の異常検出を行う異常検出手段とを備え、該異常検出手段は、第1のストップランプ回路が閉成された後(S10)、スイッチがオフ側に切り換えられて該第1のストップランプ回路が開成された直後の微少時間に異常検出を行う(S14〜S26)。
(もっと読む)
車両の走行制御装置
【課題】後続車との衝突の危険性を高めることなく、前方車との衝突を回避するための手段を実現する。
【解決手段】前方車との車間距離および相対速度の計測値と、後続車との車間距離および相対速度の計測値と、自動的に制動を掛ける距離および自動的に掛ける制動力の設定値と、から制動を設定値の通りに掛けた場合の後続車との衝突の危険度を演算する手段(S3)、この危険度の演算値が所定レベルよりも高いときは、その危険度が所定レベル以下になるように、自動的に制動を掛ける距離および自動的に掛ける制動力の設定値を補正する手段(S5)、前方車の車間距離の計測値が補正後の自動的に制動を掛ける距離以下になると補正後の自動的に掛ける制動力をもって制動を掛ける手段(S6,S8)、を備える。
(もっと読む)
車両用制御装置
【課題】本発明は、路面の状況の変化にかかわらず、常に先行車や障害物との距離を検出して精度の高い先行エリア状態検出制御を行い得る車両用制御装置を実現することを目的としている。
【解決手段】このため、レーダにより車両前方に先行する車両、あるいは障害物があるかどうかを検出する先行エリア状態検出手段と、この先行エリア状態検出手段により検出された先行エリアの状態に応じて車両を制御する車両制御手段とを備えた車両用制御装置において、車両に発生するピッチング量を検出するピッチング量検出手段と、このピッチング量検出手段により検出されたピッチング量に応じて、レーダの照射角を制御する照射角制御手段とを備えている。
(もっと読む)
車両制御システム
【課題】 右左折時における巻き込みの危険を回避し易い車両制御システムを提供する。
【解決手段】 車両制御システム1において、車両20は、道路上で右左折する際に、レーン内側を走行する発信器3から送信される無線識別情報を受信して、発信器3の存在判定を行なう。そして、発信器3が存在すると判定された場合には、自車両20の当該右左折走行を抑制するために加速制限制御ないし自動減速制御を実行する。
(もっと読む)
電動ブレーキ装置および電動ブレーキ装置の制御方法
【課題】 トルクに寄与しない電流を流さずに高応答性が要求される状況でのモータ回転数の向上と、高応答性が要求されない状況での静粛性の確保との両立を図ることができる電動ブレーキ装置および電動ブレーキ装置の制御方法を提供する。
【解決手段】 ステップS6で急増圧要求があると判断され、ステップS7で出力電圧指令が正弦波出力可能電圧よりも高いと判断され、ステップS9でモータ回転速度が大であると判断された場合には、180度矩形波駆動によりモータを駆動し、それ以外の場合には、正弦波駆動によりモータを駆動する。
(もっと読む)
運転支援装置
【課題】車両周辺の歩行者の存在を検出してその旨を運転者に報知する車両の運転支援装置において、確実に報知を行いつつ、無駄な報知を低減することを目的とする。
【解決手段】衝突回避装置1においては、携帯電話50から発信された電波を受信し、受信した信号の信号強度Sに基づいて端末所持者の存在を検出する。また、車両の各部から取得した自車両の車速V、ブレーキペダルの操作の有無に基づいて、運転者に対して端末所持者の存在を報知すべきか否かを判定する。そして、端末所持者の存在が検出され、且つ、端末所持者の存在を報知すべきであると判定すると、車内報知部16を介して端末所持者の存在を運転者に報知する。
(もっと読む)
201 - 220 / 250
[ Back to top ]