
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
61 - 80 / 250
制御可能な空圧式ブレーキブースタおよびその作動方法
本発明は、マスタシリンダに支援力を加える真空式ブレーキブースタならびに真空式ブレーキブースタを作動するための方法に関する。真空式ブレーキブースタの支援力は、調節装置ならびに主制御弁を介して調節することができる。したがって、ブレーキブースタは2つの作動モードで作動可能であり、第1作動モードでは、支援力は調節装置によって調節され、第2作動モードでは主制御弁によって調節される。本発明によるブレーキブースタは、特に液圧式ブレーキシステムおよび別のブレーキシステムの作用が組み合わされたブレーキ装置で使用することができ、液圧式ブレーキシステムのブレーキ作用は、例えば、電気自動車またはハイブリッド車両の回生ブレーキにおける別のブレーキシステムのブレーキ作用に適合される。 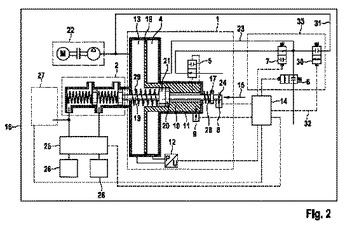 (もっと読む)
(もっと読む)
人物検出装置、人物検出プログラム、作動制御装置、および衝突緩和装置
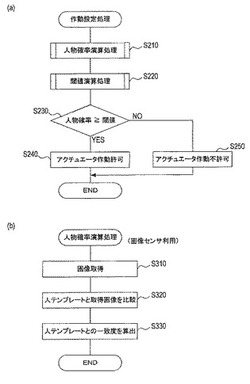
【課題】対象物が人物であるか否かを精度よく識別できるようにする技術を提供する。
【解決手段】衝突緩和装置は作動判定処理において、画像センサから取得した画像に基づいて検出された対象物の外観に関するパラメータと人物に関する比較用パラメータとが一致する度合いに応じて、対象物が人物である確率を表す人物確率を演算し(S210:S310〜S330)、人物確率が予め設定された人物閾値以上である場合に対象物が人物であると判定する(S230)。ただし、対象物を検出する際の検出環境に対応する人物の存在確率に応じた補正値を利用して、人物閾値を補正する(S220)。この補正の際には、人物の存在確率が高くなるにつれて対象物が人物であると判定されやすくなるようする。
(もっと読む)
車両制御システム

【課題】ドライバの覚醒度が低い場合であっても、車両挙動制御装置本来の性能を十分に発揮させることができる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物が接近したときに当該障害物との接触を回避するために前記車両挙動制御装置を制御する障害物回避制御手段と、前記障害物との接触を回避した後に前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両安定化制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記障害物回避制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を増大させ、前記車両安定化制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を減少させる。
(もっと読む)
車両運動制御装置
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達させるため最適な軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値を設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、目標位置の車体横方向の成分Ye、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、最短回避軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、最短距離XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、目標位置及び目標位置における速度方向に到達させるために回避距離が最短となる軌道及び車体合成力を導出する。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
車両制御装置
【課題】衝突安全制御による車両の動作を体験できる車両制御装置を提供すること。
【解決手段】車両制御装置20は、自車両と障害物との間の距離および相対速度に基づいて自車両が障害物と衝突する可能性があるか否かを判断し、衝突の可能性がある場合には自車両の走行速度を減速させる衝突安全制御を行う車両制御装置20であって、衝突を回避できるか否かを判断し、衝突回避不可と判断した場合に衝突安全制御を行う通常走行処理手段251と、予め設定された体験走行実行条件を満たすか否かを判断し、体験走行実行条件を満たす場合には、通常走行処理手段251に代えて、衝突安全制御を行う体験走行処理手段252を有する。
(もっと読む)
車両安定化装置
【課題】自車両の衝突時に、運転者による不確実で信頼性の低い操作信号をもとに自車両の制動制御が実行されないようにした車両安定化装置を提供する。
【解決手段】少なくとも一つ以上の車両安定化制御用センサのセンサ情報に基づいて自車両の目標状態量を算出する目標状態量演算手段と、車両安定化制御用センサによって検出される自車両の状態量が目標状態量となるように自車両に制動力を付与する制動力付与手段と、を備えた車両安定化装置において、自車両の衝突の有無及び衝突位置を検出可能な衝突検出手段を備え、制動力付与手段は、自車両の衝突が検出された後の所定時間、目標状態量に基づく制動制御を中断するとともに、衝突位置に応じてあらかじめ決められた制動制御を実行する。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、好適に減速制御を実行する。
【解決手段】車両の制御装置は、減速対象地点における運転者の減速行動を学習する学習手段(210)と、車両が減速対象地点に接近している場合に、学習された減速条件を用いて減速制御を行うべきか否かを判定する判定手段(220)と、減速制御を行うべきと判定された場合に、学習された減速行動に応じた減速制御を行う減速制御手段(230)と、減速制御を行うべきでないと判定された場合に、運転者による減速操作及び該減速操作の終了を検出する減速操作検出手段(130)と、減速操作が終了した時点から、減速操作を引き継ぐと共に減速制御を完了させるべき減速目標地点までの減速を補完するような減速パターンを演算する演算手段(240)と、減速パターンに応じた補完減速制御を行う補完減速制御手段(250)とを備える。
(もっと読む)
運転支援装置
【課題】、方向指示器を作動させた特定車両の挙動を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】方向指示器を作動させた特定車両(例えば、先行車両)についての旋回タイミングを予測する運転支援装置であって、特定車両の周辺に存在する周辺車両(例えば、先先行車両)の位置を取得する周辺車両位置取得手段と、特定車両が方向指示器を作動させた際の周辺車両の位置に応じて特定車両の旋回タイミングを予測する予測手段を備えることを特徴とし、周辺車両の特定車両との相対距離及び相対速度の少なくとも一方の相対情報を取得する相対情報取得手段を備え、予測手段は、周辺車両の特定車両との相対情報を用いて特定車両の旋回タイミングを予測すると好適である。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
車両の走行安全制御装置
【課題】事前に渋滞末尾を予測し、自車両が渋滞末尾に近づいたときに被害軽減ブレーキの準備を行うことで、走行路の状況に関わらず円滑に被害軽減ブレーキ制御を実行することのできる車両の走行安全制御装置を提供すること。
【解決手段】カメラに撮影した「渋滞」の文字を含む電光表示を抽出し(S1)、当該表示内容に応じて渋滞末尾を推定し(S4)、当該渋滞末尾までの距離が所定距離未満であるときには被害軽減ブレーキの準備を行う(S5,S6)。
(もっと読む)
衝突予測装置
【課題】衝突予測装置において、車両の障害物と衝突する可能性のある領域が異なる場合でも、衝突予測の信頼性を容易に維持させる技術を提供する。
【解決手段】自車両における車体幅を区分けした複数の区画に対して、自車両と障害物との関係から算出される衝突予測位置及び信頼度を当てはめ、複数の区画のうちから障害物が衝突すると予測される衝突予測区画を判定するものであって、区画Xn(nは整数)は、自車両における車体幅にかかわらず障害物検出センサの検出精度によって決定された一定幅に設定されており、複数の区画X1〜X5は、自車両における車体幅に対して、区画Xnが1列に隙間無く並ぶ状態(図2(a))か、又は、区画Xnが重なった部分を有しつつ区画Xnが隙間無く並ぶ状態(図2(b))のどちらかの状態に設定されている。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のブレーキ作動後、所定条件下でブレーキ作動状態を解除する。
【解決手段】ブレーキ作動後、障害物がレーダの死角に入ったか否かを判定する(S6、S7)。障害物が死角に入れば、少なくとも、死角に入ってから測定される車速Vm、並びに、死角に入ってからの経過時間tcに基づいて、障害物までの推定距離Xを演算する(S14、S15)。そして、衝突が検出されず、且つ、推定距離Xが0以下であるときに、死角に入った障害物との衝突を回避できたと判定して、ブレーキ作動状態を解除する(S16、S17、S11)。このため、車両を迅速に通常走行へと復帰させることができる。
(もっと読む)
衝突被害軽減装置
【課題】対象物と車両とが衝突する直前に保護装置を作動させるか否かを精度よく判定することが可能な衝突被害軽減装置を提供する。
【解決手段】衝突被害軽減装置2の制御部20では、監視センサ11からの入力情報に基づいて、TTC算出部22が衝突予測時間(TTC)を算出し、第1判定部23が、対象物と車両との衝突可能性のレベルが第3レベル(TTC≦第1閾値時間)であるか否かを判定する。ここで、TTCが第1閾値時間以下であると判定すると、車両制御部26が自動ブレーキを作動させるとともに、速度推定部24が、自動ブレーキによる車両の減速度に基づいて、対象物と車両との衝突時の相対速度である衝突速度を推定する。そして、第2判定部25によって、衝突可能性のレベルが第4レベル(衝突速度≧閾値速度,且つ,TTC≦第2閾値時間)であると判定すると、車両制御部26が保護装置を作動させるためのACT15〜17を駆動する。
(もっと読む)
車両用制御装置
【課題】ミリ波レーダが開閉バーを物体として検出し、PCSが作動することによって運転者に違和感を与えてしまうこと等を抑制できる車両用制御装置を得る。
【解決手段】ETC車載器10と路側アンテナの通信が完了したときから、車速センサ50によって検出された自車両の速度が所定速度以上になったときまで、物体判定閾値を、開閉バーを無視するように、基準値から開閉バー判定値に変更し、自車両の前方物体からの反射波のピークレベルが物体判定閾値未満の場合、前方物体をノイズと見なし、一方、ピークレベルが物体判定閾値以上である場合、前方物体を目標物体として検出し、前方物体の距離及び相対速度を算出するミリ波レーダ20と、算出された前方物体の距離及び相対速度に基づき、衝突予想時間及び衝突軽減処理閾値を算出し、衝突予想時間が衝突軽減処理閾値未満である場合、衝突軽減処理を行う衝突軽減制御部30とを設けた。
(もっと読む)
車両における非常ブレーキ過程の実行方法
【課題】簡単且つコスト的に有利に実行可能な手段を用いて車両における非常ブレーキ過程を実行する方法を提供する。
【解決手段】 車両における非常ブレーキ過程の実行方法において、非常事態の場合に、上昇されたブレーキ力を発生するためにブレーキ装置内の少なくとも1つの電気操作部が自動的に操作される。電気操作部には、該操作部の定格電圧を超える最大電圧が供給される。
(もっと読む)
車両システム、交通システム
【課題】車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保する。
【解決手段】車両の走行速度が、車両が無停止で走行するための速度範囲内ではないと判断された場合には(S120:NO)、注意喚起を実行する必要があると判断し、減速支援を示す情報(車両が無停止で走行するための速度範囲)と注意喚起を示す情報(「後方注意」の文字)とをメータパネル本体21の表示領域21aに同時に表示させる(S125、S130)。このことにより、後方を走行する車両から急接近されないように運転者が注意して車両の減速を行うことができる。さらに、このような減速支援によってスムーズな減速が実行されることで、燃費向上効果が低減されない。したがって、車両の運転者に対して減速支援を行う際に、燃費向上効果を低減させることなく、走行時の安全性を確保することができる。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】サスペンションの形式等に関わらず、確実に走行車線からの逸脱を回避する方向にヨーモーメントが発生するように、各輪の制動力を適切に分配して制動制御する。
【解決手段】白線、障害物に対する第1、第2の逸脱量を算出し、ヨーモーメントを発生させて白線、障害物に対する逸脱を防止するための第1、第2の制動力制御量、減速度を発生させて白線、障害物に対する逸脱を防止するための第3、第4の制動力制御量を設定する。第1、第2の制動力制御量によりヨーモーメントを発生させるための制動力制御を実行する際に、前軸のキングピン配置に起因する路外逸脱方向へのステアリングトルクの発生が予め設定した値を超えないようにヨーモーメントを発生させるための制動力制御量の前軸側の分担率を制限すると共に、前後の制動力配分が接地荷重配分となるように制動力配分を補正して、各輪の路外逸脱防止制御用制動力を算出する。
(もっと読む)
61 - 80 / 250
[ Back to top ]