
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
81 - 100 / 250
制動装置
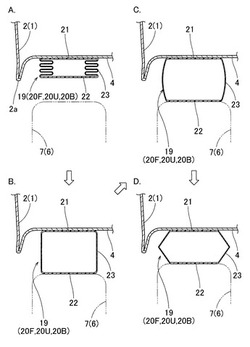
【課題】作動時に車輪を的確に制動させることができて、高い制動作用を奏する制動装置を提供すること。
【解決手段】制動装置は、車両の衝突前に作動されて、車両の車輪6を制動可能に構成されて、車輪6における略上半分の領域の外周側を覆うように配置されるタイヤハウス4に収納されて、作動時に、内部に膨張用ガスを流入させて、タイヤハウス4と車輪6との間の隙間を埋めて車輪6のタイヤ7に圧接されるように膨張するエアバッグ19を、備える。エアバッグ19が、塑性変形可能な材料から形成されて、塑性変形しつつ膨張完了される構成とされるとともに、少なくとも車輪6の前方側に配置され、膨張完了時におけるタイヤ7への圧接当初に、タイヤ7への圧接状態を維持可能な形状保持性を有して、かつ、塑性変形可能に、構成されている。
(もっと読む)
制御要求調停装置

【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
車両制御装置
【課題】 ドライバに与える違和感の少ない運転支援を実現できる車両制御装置を提供する。
【解決手段】 車両制御用のアクチュエータ(エンジン15、制動制御装置)を備えた車両に搭載され、自車両の進行方向前方の走行環境を計測する走行環境計測部(カメラ1a,1b)と、走行環境計測部による走行環境の計測結果の信頼度(存在信頼度)を判定する信頼度判定部22と、判定された信頼度を必要条件としてアクチュエータの作動を行うコントロールユニット2と、を備えた。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】ブレーキに対して過度な負荷が加わることなく、ブレーキ装置により発生する振動や騒音も抑制し、ステアリング制御とブレーキ制御とによりドライバに対して現状の走行状態を的確に伝達しつつ、適切に車両の路外逸脱を防止する。
【解決手段】白線からの逸脱量に応じ白線からの逸脱を防止する第1のブレーキ制御量ABL0を、障害物に対する逸脱量に応じ障害物に対する逸脱を防止する第2のブレーキ制御量ABS0を設定し、白線からの逸脱を防止する第1のステアリング制御量ASL0を、第1のブレーキ制御量ABL0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定し、障害物に対する逸脱を防止する第2のステアリング制御量ASS0を、第2のブレーキ制御量ABS0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定する。そして、これらを基に、ブレーキ制御量AB、ステアリング制御量ASを算出する。
(もっと読む)
車両緊急停止装置
【課題】車両緊急停止装置に関し、乗客の誤りや故意で作動することなく、運転者の異常を検知したときに限り乗客の応答動作に基づいて車両を自動的に緊急停止することができるようにする。
【解決手段】運転者の異常を検知する運転者状態検知手段10と、運転者状態検知手段10が運転者の異常を検知したときに運転者の異常を車内及び車外に報知する車内用報知手段3及び車外用報知手段6,7と、乗客の応答動作に基づいて乗客の車両停止要求を検知する乗客側停止要求検知手段4,5と、車両を自動的に制動させる自動制動手段8と、運転者状態検知手段10によって運転者の異常が検知され且つ乗客側停止要求検知手段4,5によって乗客の車両停止要求が検知されたときに、緊急停止の必要があると判断して自動制動手段8に制動指示を行なう制御手段20とを備える。
(もっと読む)
車両制御装置
【課題】接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行う。
【解決手段】接触回避支援制御部は、VSA制御部によるVSA制御がオフ状態になっている場合は、オン状態になっている場合のタイミングよりも早いタイミングで接触回避支援、例えば、警報を発生し、該警報により操向ハンドルの操作を促すことで、確実に接触回避支援を行うことができ、結果として、接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行うことができる。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なブレーキアクチュエータの構成にて実現する。
【解決手段】
ホイールシリンダのうちの2つのホイールシリンダを連通接続する第1液圧路と、第1液圧路に接続する2つのホイールシリンダとは異なる残りの2つのホイールシリンダを連通接続する第2液圧路と、第1及び第2液圧路の制動液圧を調整する第1及び第2調圧手段とを備え、緊急回避制御の実行と前記安定化制御の実行とが同時に行われる場合、緊急状態量取得手段によって取得される緊急状態量に基づいて第1調圧手段を制御するとともに、ステア特性量取得手段によって取得されるステア特性量に基づいて第2調圧手段を制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。
【解決手段】
車両の緊急状態を回避するために車輪に制動トルクを付与する回避制御を実行するための第1目標量(回避制御の目標量)を演算する回避制御手段と、車両の安定性を確保するために、車輪のうちから選択車輪を決定し、この選択車輪に制動トルクを付与する安定化制御を実行するための第2目標量(安定化制御の目標量)を演算する安定化制御手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを第1目標量に基づいて制御するとともに、選択車輪に付与する制動トルクを、第1目標量及び前記第2目標量に基づいて制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なシステム構成にて実現する。
【解決手段】
車両の緊急状態を回避する回避制御の目標減速度を演算する回避制御手段と、選択車輪に制動トルクを付与して車両の安定性を確保する安定化制御の目標スリップ速度を演算する安定化制御手段と、実車輪速度を取得する車輪速度取得手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを目標減速度に基づいて制御するとともに、選択車輪に付与する制動トルクを選択車輪の目標スリップ速度、及び、非選択車輪の実車輪速度に基づいて制御する。
(もっと読む)
ブレーキ制御システム
【課題】マスタシリンダ圧を精確に検知し、バックアップする機能を備えて、的確なブレーキ制御を可能とするブレーキ制御システム。
【解決手段】運転者のブレーキ操作により作動するマスタシリンダと、ブレーキ操作の量に応じて前記マスタシリンダ内の圧力を調整する第1の機構と、前記第1の機構の作動を制御する第1の制御装置と、マスタシリンダ内の前記圧力がホイールシリンダに連通するのを調整する第2の機構と、前記第2の機構の作動及び前記ホイールシリンダに連通される圧力を加圧するポンプ装置の作動を制御する第2の制御装置とを備え、第1及び第2の制御装置は、それぞれの電源回路及びCPUを内蔵し、前記マスタシリンダ内の圧力を計測するものであって前記第1の制御装置に結線される第1の液圧センサと、前記マスタシリンダ内の圧力を計測するものであって前記第2の制御装置に結線される第2の液圧センサと、を装備したことを特徴とする。
(もっと読む)
走行計画生成装置
【課題】本発明は、信頼性の向上を図ることができる走行計画生成装置を提供する。
【解決手段】本発明は、車両の速度制御目標である走行速度パターンを生成する走行計画生成装置1であって、車両の前方を走行する先行車両の減速情報を取得し、取得した減速情報に基づいて、車両を停止させるための走行速度パターンである停止用速度パターンを生成するECU2を備える。この走行計画生成装置1では、先行車両の減速情報に基づいて、車両を停止させるための走行速度パターンである停止用速度パターンを生成し、この停止用速度パターンに沿って走行制御を行うことで、先行車両の有無やその減速傾向に対応した運転が実現される。その結果、先行車両の挙動により走行速度パターンに沿った走行制御が妨げられることを防止することができるので、省燃費運転を実現するにあたり、装置の信頼性の向上を図ることができる。
(もっと読む)
車両制御システム
【課題】自車の進路上の障害物を回避する際に、ドライバの保舵状態の違いによって車両挙動制御装置の制御が影響を受けることを抑制して、障害物回避能力を向上させる。
【解決手段】操舵角に基づいて車両の挙動を制御するEPSコントローラ1、VSAコントローラ2、RTCコントローラ3、及び左右駆動力配分コントローラ4と、自車の進路上の障害物を検知するレーダー装置18と、障害物を回避するドライバの操作を判別して各コントローラを制御する障害物回避制御部5とを有し、この障害物回避制御部が、ドライバの保舵状態が変則的か否かを判別して、保舵状態が変則的である場合には、障害物回避制御中に各コントローラの制御値が増大補正されるように制御する構成とする。
(もっと読む)
車両の走行安全装置
【課題】自車両と他車両との衝突可能性の有無を精度良く判定する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の進路と交差する進行方向で自車両に接近するように移動する接近交差車両を検出する交差車両検出部32と、接近交差車両の進行方向に基づいて、接近交差車両の進路を予測する交差車進路予測部33と、自車両の進路と接近交差車両の進路とに基づいて、自車両と接近交差車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両が位置する地点において該自車両によって認識される接近交差車両の側面長さLBを検出する側面長さ検出部34と、側面長さLBの時間的な変化に基づいて、接近交差車両の進路を補正する交差車進路補正部38とを備え、衝突可能性判定部40は、補正された接近交差車両の進路に基づいて衝突可能性の有無を判定する。
(もっと読む)
車両の液圧式ブレーキシステムのためのブレーキ液を移動させ、貯留するための方法および装置
本発明は、車両の液圧式ブレーキシステムのためのブレーキ液を移動させ、貯留するための方法および装置に関する。ブレーキシステムは、少なくとも1つの液圧アキュムレータと、少なくとも1つのブレーキブースタと、少なくとも1つのブレーキ回路とを備え、ブレーキブースタは、ブレーキブースタの作動によって運転手が操作しなくても自動的にある容積のブレーキ液を移動させることができるように構成されている。本発明の本質は、ブレーキブースタの自動的な作動によってブレーキ液が液圧アキュムレータ内に移動し、貯留され、ブレーキシステムの動作状態に関係して、貯留されたブレーキ液の少なくとも一部が液圧アキュムレータからブレーキ回路に排出されることである。 (もっと読む)
車両の走行安全装置
【課題】自車両が進行方向前方の先行車両に衝突する可能性を低減する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の走行路に交差する交差路を走行する交差車両を検出する交差車両検出部32と、交差車両の進路を予測する交差車進路予測部33と、自車両から所定距離以内の進行方向前方に存在する先行車両を検出する先行車両検出部35と、自車両の進路と交差車両の進路とに基づいて自車両と交差車両との衝突可能性の有無を判定し、先行車両の位置と交差車両の進路とに基づいて交差車両と先行車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両の走行路と交差路との交差点において、自車両と交差車両との衝突可能性が有ると判定された場合、又は、交差車両と先行車両との衝突可能性が有ると判定された場合に、所定の警報または前記回避制御を実行する車両制御部41とを備える。
(もっと読む)
車両制御装置、車両および車両制御方法
【課題】車両制御における運転者の違和感を抑制することができる車両制御装置、車両および車両制御方法を提案すること。
【解決手段】実相対距離Drに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対距離Dsを算出し、実相対速度Vrに基づいて運転者の知覚による知覚対象物TAと自車両CAとの相対速度を示す知覚相対速度Vsを算出し(ステップST2)、知覚相対距離Dsと知覚相対速度Vsとの比である知覚相対比Xを算出し(ステップST3)、知覚相対比Xがしきい値X0を越える場合に車両制御を行う(ステップST4,5)。知覚相対比X(知覚相対比Xが反映された制御値)に基づいて車両制御を行うので、車両制御における運転者の違和感を抑制することができる。
(もっと読む)
道路車両において自発的な非常制動を正確に実行する方法
道路車両(1)において事故の厳しさを減少するため自発的な非常制動を正確に実行する方法が提案され、自発的な非常制動中に車両(1)の速度が求められる。この方法によれば、車両の車輪回転数とは無関係な付加的な速度検出が行われる。これにより、自発的な強い制動のため車両速度が車輪回転数により高い場合においても、車両速度を十分正確に求めることができる。 (もっと読む)
動的注意モジュールを備えた運転者支援システムまたはロボット
【課題】視覚に基づく注意システムに関し、自車両の周辺環境をモニタし、運転者を支援(アシスト)する。
【解決手段】少なくとも1つの視覚センサと、少なくとも1つの2次元特徴マップを生成するよう、前記視覚センサの出力信号を処理する少なくとも1つの画像処理モジュールと、前記少なくとも1つの特徴マップに基づいて、第1の顕著性マップを生成する背側注意サブシステムであって、該顕著性マップは、運転者支援システムの注意の焦点を示す、システムと、背側注意サブシステムとは独立し、前記少なくとも1つの特徴マップに基づいて、第2の顕著性マップを生成する腹側注意サブシステムであって、該特徴マップは、背側注意サブシステムにおいて用いられるものと同じでも異なってもよい、システムと、を備える。該第2の顕著性マップは、予期しない視覚刺激を示す。
(もっと読む)
車両の軌道を変更するための方法及びシステム
この発明は、車両の軌道を変更するための方法に関し、該車両が、手動の操舵装置、少なくとも1対の接地部材、並びに手動操舵装置と接地部材との間の機械的相互接続を含み、車両の軌道が変更されるように、前記接地部材の少なくとも1つに制動力を付与すると同時に、機械的相互接続から生じる操舵装置外乱を抑制するステップを特徴とする。 (もっと読む)
81 - 100 / 250
[ Back to top ]